You might also like
- Sla7024m (Motor Driver)Document13 pagesSla7024m (Motor Driver)Franklin Miranda RoblesNo ratings yet
- A3953 DatasheetDocument12 pagesA3953 DatasheetMohan RajNo ratings yet
- Sla7024 26 29mDocument12 pagesSla7024 26 29mbashtavNo ratings yet
- Sla7024m PDFDocument12 pagesSla7024m PDFEJASMANYNo ratings yet
- Thb7128 InstructionsDocument9 pagesThb7128 InstructionsanhxcoNo ratings yet
- Current Mode PWM Controller: Features DescriptionDocument9 pagesCurrent Mode PWM Controller: Features DescriptionJozo ĆurčićNo ratings yet
- D Escriptio: S FeatureDocument8 pagesD Escriptio: S Featurevsc2012No ratings yet
- IC 3842 para FonteDocument8 pagesIC 3842 para FonteTomNedscNo ratings yet
- General Description Features: Bipolar/CMOS/DMOSDocument13 pagesGeneral Description Features: Bipolar/CMOS/DMOSjavierrincon800No ratings yet
- A 2918 SW Data SheetDocument8 pagesA 2918 SW Data SheetGustavo LunaNo ratings yet
- Isolated Flyback Switching Regulator W - 9V OutputDocument16 pagesIsolated Flyback Switching Regulator W - 9V OutputCasey DialNo ratings yet
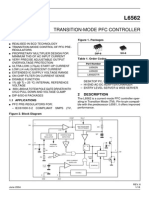
- Transition-Mode PFC Controller: 1 FeaturesDocument17 pagesTransition-Mode PFC Controller: 1 Featuresadriancho66No ratings yet
- A3953 Datasheet PDFDocument12 pagesA3953 Datasheet PDFfelres87No ratings yet
- 28V 2A Step-Down Switching Regulator: Power Management Features DescriptionDocument19 pages28V 2A Step-Down Switching Regulator: Power Management Features DescriptionLuis Espino PérezNo ratings yet
- LD7552 DS 00Document10 pagesLD7552 DS 00BRIGHT_SPARKNo ratings yet
- Miniature, Low-Voltage, Precision Step-Down Controller: General Description - FeaturesDocument20 pagesMiniature, Low-Voltage, Precision Step-Down Controller: General Description - Featurescatsoithahuong84No ratings yet
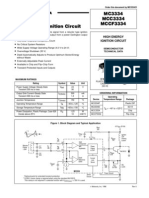
- Datasheet MC3334Document6 pagesDatasheet MC3334odipasNo ratings yet
- Udn2916b PDFDocument8 pagesUdn2916b PDFSerchu_29No ratings yet
- MC 34152Document12 pagesMC 34152dcastrelos2000No ratings yet
- 7214Document12 pages7214Dan EsentherNo ratings yet
- 3-Phase Brushless DC Motor Controller/Driver With Back-Emf SensingDocument12 pages3-Phase Brushless DC Motor Controller/Driver With Back-Emf SensingPero01No ratings yet
- Ci Driver Do Motor Do CD Rom DatasheetDocument11 pagesCi Driver Do Motor Do CD Rom DatasheetAdriano TameouvindoNo ratings yet
- L6208D To L6208PDDocument16 pagesL6208D To L6208PDwtn2013No ratings yet
- Fan 7314Document14 pagesFan 7314Kamal NonekNo ratings yet
- SA5888Document8 pagesSA5888albinicue1No ratings yet
- Quad Low Side Driver: DescriptionDocument17 pagesQuad Low Side Driver: DescriptionDan EsentherNo ratings yet
- Low Power Dual Operational Amplifiers Az358/358CDocument13 pagesLow Power Dual Operational Amplifiers Az358/358CMarissa ValdezNo ratings yet
- MC3479 Stepper Motor Driver: FeaturesDocument10 pagesMC3479 Stepper Motor Driver: FeaturesHenry CastandNo ratings yet
- S Feature D Escriptio: LTC1261 Switched Capacitor Regulated Voltage InverterDocument16 pagesS Feature D Escriptio: LTC1261 Switched Capacitor Regulated Voltage InverterFer CurtinoNo ratings yet
- MSM6544Document13 pagesMSM6544Shuvamay GuhaNo ratings yet
- Datasheet LM2576TDocument19 pagesDatasheet LM2576TPLASTIC666No ratings yet
- Motor Driver - Full-Bridge PWM - A3953-N5Document14 pagesMotor Driver - Full-Bridge PWM - A3953-N5Ludwig Schmidt100% (1)
- FDocument20 pagesFfaithfully_fatihNo ratings yet
- Uc3842 Monitor Power Supply Regulator IcDocument7 pagesUc3842 Monitor Power Supply Regulator IcJoseph Sidhom SnadaNo ratings yet
- LT1510CSDocument16 pagesLT1510CSpetrovi482No ratings yet
- Udn 2543 BDocument8 pagesUdn 2543 BMarcelo ReNo ratings yet
- Single Ended Active Clamp/Reset PWM: Features DescriptionDocument16 pagesSingle Ended Active Clamp/Reset PWM: Features Descriptioncatsoithahuong84No ratings yet
- VNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverDocument26 pagesVNH2SP30-E: Automotive Fully Integrated H-Bridge Motor DriverIan LuksNo ratings yet
- Uc2577 AdjDocument14 pagesUc2577 AdjChandranoola RajuNo ratings yet
- Fully Integrated H-Bridge Motor Driver: VNH3SP30Document26 pagesFully Integrated H-Bridge Motor Driver: VNH3SP30Dan EsentherNo ratings yet
- 5V Disk Drive Spindle & VCM, Power & Control "Combo": General Bicmos TechnologyDocument17 pages5V Disk Drive Spindle & VCM, Power & Control "Combo": General Bicmos Technologybenjoshu9031No ratings yet
- LM2576/LM2576HV Series Simple Switcher 3A Step-Down Voltage RegulatorDocument24 pagesLM2576/LM2576HV Series Simple Switcher 3A Step-Down Voltage Regulatorkaveh-bahiraeeNo ratings yet
- LM2576Document24 pagesLM2576Constantinescu OctavianNo ratings yet
- Datasheet Smooth L7250Document46 pagesDatasheet Smooth L7250tosti77No ratings yet
- Full-Bridge PWM Motor Driver: Absolute Maximum RatingsDocument17 pagesFull-Bridge PWM Motor Driver: Absolute Maximum RatingsLizeth RodriguezNo ratings yet
- M54649LDocument5 pagesM54649LAllan AlexNo ratings yet
- Tle6220gp DatasheetDocument18 pagesTle6220gp Datasheetmaelo99999No ratings yet
- 74LVT2244, 74LVTH2244 Low Voltage Octal Buffer/Line Driver With 3-STATE Outputs and 25 Series Resistors in The OutputsDocument9 pages74LVT2244, 74LVTH2244 Low Voltage Octal Buffer/Line Driver With 3-STATE Outputs and 25 Series Resistors in The Outputsjovares2099No ratings yet
- HV9971Document10 pagesHV9971Jazmin JorgeNo ratings yet
- Microstepping DMOS Driver With Translator: Description Features and BenefitsDocument18 pagesMicrostepping DMOS Driver With Translator: Description Features and BenefitsSaid BoubkerNo ratings yet
- Data SheetDocument12 pagesData SheetMarcoAntonioCamanTraihuelNo ratings yet
- Uc3842b 3843BDocument10 pagesUc3842b 3843Bbob75No ratings yet
- 105k 250v CeramicDocument20 pages105k 250v CeramicOVALLEPANo ratings yet
- Two-Phase Stepper Motor Driver: DescriptionDocument19 pagesTwo-Phase Stepper Motor Driver: DescriptionDan EsentherNo ratings yet
- L6565Document18 pagesL6565Sergio Daniel BarretoNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- ELEC-OPAMP-S7 Active Low Pass Filter - Op-Amp Low Pass FilterDocument8 pagesELEC-OPAMP-S7 Active Low Pass Filter - Op-Amp Low Pass Filterfelres87No ratings yet
- Interface Circuits For TIA-EIA-485 CcontrolsDocument4 pagesInterface Circuits For TIA-EIA-485 Ccontrolsfelres87No ratings yet
- Active Filters Theory and DesignDocument276 pagesActive Filters Theory and Designfelres87No ratings yet
- ActivefilterreportDocument32 pagesActivefilterreportfelres87No ratings yet
- AVR223 - Digital Filters With AVRDocument24 pagesAVR223 - Digital Filters With AVRfelres87No ratings yet
- Comparison of Different DC Motor Positioning Control AlgorithmsDocument6 pagesComparison of Different DC Motor Positioning Control Algorithmsfelres87No ratings yet
- AN-CM-250 Position and Speed Control of A DC Motor Using Analog PID ControllerDocument32 pagesAN-CM-250 Position and Speed Control of A DC Motor Using Analog PID Controllerfelres87No ratings yet
- A3953 Datasheet PDFDocument12 pagesA3953 Datasheet PDFfelres87No ratings yet
- 8051 ManualDocument334 pages8051 Manualapi-3776064100% (1)
- Extension of MDRRMO OfficeDocument12 pagesExtension of MDRRMO OfficeJustin YuabNo ratings yet
- Koehring ManualDocument56 pagesKoehring ManualKyle A. Nolan100% (3)
- C MukulDocument1 pageC Mukulharishkumar kakraniNo ratings yet
- BLDG Permit Form (Back To Back)Document2 pagesBLDG Permit Form (Back To Back)ar desNo ratings yet
- Perceptual Objective Listening Quality Assessment (POLQA), The Third Generation ITU-T Standard For End-to-End Speech Quality Measurement Part I-Temporal AlignmentDocument19 pagesPerceptual Objective Listening Quality Assessment (POLQA), The Third Generation ITU-T Standard For End-to-End Speech Quality Measurement Part I-Temporal AlignmentmewarulesNo ratings yet
- Linguistic LandscapeDocument11 pagesLinguistic LandscapeZara NurNo ratings yet
- Worship Aid - May Crowning 2020Document5 pagesWorship Aid - May Crowning 2020Kevin RyanNo ratings yet
- Ga-Ta10 (LHH)Document181 pagesGa-Ta10 (LHH)Linh T.Thảo NguyễnNo ratings yet
- Stacy Frysinger - Him ExperienceDocument2 pagesStacy Frysinger - Him Experienceapi-250552115No ratings yet
- Sabre V8Document16 pagesSabre V8stefan.vince536No ratings yet
- ECS 3390 - Business and Technical CommuncationsDocument293 pagesECS 3390 - Business and Technical CommuncationsEliseo Robles0% (3)
- 33kV BS7835 LSZH 3core Armoured Power CableDocument2 pages33kV BS7835 LSZH 3core Armoured Power Cablelafarge lafargeNo ratings yet
- Centiloquium of PtolemyDocument37 pagesCentiloquium of PtolemyNatasa Karalic Koprivica100% (9)
- Canadian Solar-Datasheet-All-Black CS6K-MS v5.57 ENDocument2 pagesCanadian Solar-Datasheet-All-Black CS6K-MS v5.57 ENParamesh KumarNo ratings yet
- I. Errors, Mistakes, Accuracy and Precision of Data Surveyed. A. ErrorsDocument53 pagesI. Errors, Mistakes, Accuracy and Precision of Data Surveyed. A. ErrorsJETT WAPNo ratings yet
- Nursing Care Plan Diabetes Mellitus Type 1Document2 pagesNursing Care Plan Diabetes Mellitus Type 1deric85% (46)
- 27 Technip Energies - JD (PWD Students Only)Document1 page27 Technip Energies - JD (PWD Students Only)0901EE201067 KUNAL JOLLY SAXENANo ratings yet
- Chapter - 01 Geography The Earth in The Solar SystemDocument10 pagesChapter - 01 Geography The Earth in The Solar SystemKarsin ManochaNo ratings yet
- Calgary Project Consultants, DubaiDocument18 pagesCalgary Project Consultants, DubaiManish GuptaNo ratings yet
- Make or Buy - ProblemDocument4 pagesMake or Buy - ProblemTk KimNo ratings yet
- Tadano450xl PDFDocument12 pagesTadano450xl PDFmunawar0% (1)
- Play Tennis Manual PDFDocument52 pagesPlay Tennis Manual PDFAnonymous GJuRvp9A5T100% (2)
- Steve Talbott Getting Over The Code DelusionDocument57 pagesSteve Talbott Getting Over The Code DelusionAlexandra DaleNo ratings yet
- Hurricanes Reading Comprehension FreebieDocument20 pagesHurricanes Reading Comprehension FreebieAlex WaddellNo ratings yet
- Master List WDocument27 pagesMaster List Wefrem111No ratings yet
- D90KSDocument1 pageD90KSAmilton filhoNo ratings yet
- Sequence Analytical and Vector Geometry at Teaching of Solid Geometry at Secondary SchoolDocument10 pagesSequence Analytical and Vector Geometry at Teaching of Solid Geometry at Secondary SchoolJuan S. PalmaNo ratings yet
- TSR 9294 DLA3 Dragons RestDocument78 pagesTSR 9294 DLA3 Dragons RestLéo Duarte100% (4)
- Manual en TC1 TD4 Curr 2018-07-16Document39 pagesManual en TC1 TD4 Curr 2018-07-16Daniel Peña100% (1)
- P Training For ResilienceDocument35 pagesP Training For ResilienceLbrito01100% (1)