
Sensors 14 11278 PDF
Sensors 14 11278 PDF
You might also like
- Delta5men PDFDocument21 pagesDelta5men PDFMOREENo ratings yet
- SAP BASIS Tutorial 3 Unix & Linux - SAP BASIS Administration and Learning TutorialsDocument13 pagesSAP BASIS Tutorial 3 Unix & Linux - SAP BASIS Administration and Learning Tutorialsvlsharma7100% (1)
- Pune Software Companies - List of IT Companies in PuneDocument6 pagesPune Software Companies - List of IT Companies in PuneChittaranjan Baral50% (2)
- Hand Gesture Based Camera Monitorning System Using Raspberry PiDocument4 pagesHand Gesture Based Camera Monitorning System Using Raspberry PidanangkitaNo ratings yet
- Hand Gesture Recognition in Images and Video: Ilan Steinberg, Tomer M. London, Dotan Di CastroDocument21 pagesHand Gesture Recognition in Images and Video: Ilan Steinberg, Tomer M. London, Dotan Di CastroSukh VirNo ratings yet
- Detection and Rectification of Distorted FingerprintsDocument7 pagesDetection and Rectification of Distorted FingerprintsEditor IJTSRDNo ratings yet
- Movipro Diagnóstico PPT Movipro-Sdc Diagnose Prozessdaten enDocument23 pagesMovipro Diagnóstico PPT Movipro-Sdc Diagnose Prozessdaten enAlfredo Jose Centeno CortesNo ratings yet
- Ijert Ijert: Vehicle License Plate Detection From Video Using Edge Detection and Morphological OperatorsDocument6 pagesIjert Ijert: Vehicle License Plate Detection From Video Using Edge Detection and Morphological OperatorsInderjeet SinghNo ratings yet
- A Real Time Embedded Finger Vein Recognition System For Authentication On Mobile DevicesDocument4 pagesA Real Time Embedded Finger Vein Recognition System For Authentication On Mobile DevicesRaghul RamasamyNo ratings yet
- Paris 2020Document10 pagesParis 2020Diogo do Espírito SantoNo ratings yet
- User Manual PrimaxDocument165 pagesUser Manual PrimaxElihu Vazquez100% (1)
- Autonomous EyeDocument7 pagesAutonomous EyeAnonymous kw8Yrp0R5rNo ratings yet
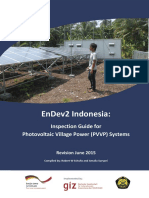
- Endev2 Indonesia:: Inspection Guide For Photovoltaic Village Power (PVVP) SystemsDocument55 pagesEndev2 Indonesia:: Inspection Guide For Photovoltaic Village Power (PVVP) SystemsElectricité & Instrumentation Gassi TouilNo ratings yet
- CCTV Installation TechnicianDocument331 pagesCCTV Installation TechnicianPartha SheeNo ratings yet
- DICOM Conformance Statement MicroDose L50 9.0Document83 pagesDICOM Conformance Statement MicroDose L50 9.0Javier PayáNo ratings yet
- New Report On Smartphone Cameras-3Document16 pagesNew Report On Smartphone Cameras-3Vaishnav GhadgeNo ratings yet
- Line Differential Protection and Control RED615: Modbus Point List ManualDocument44 pagesLine Differential Protection and Control RED615: Modbus Point List ManualIkram Ullah KakarNo ratings yet
- Bearing Fault Classification Using EnsemDocument20 pagesBearing Fault Classification Using EnsemAmag2011No ratings yet
- REF615 Modbuspoint 756581 ENdDocument52 pagesREF615 Modbuspoint 756581 ENdseluagloryNo ratings yet
- Motor Protection and Control REM615: Modbus Point List ManualDocument44 pagesMotor Protection and Control REM615: Modbus Point List Manualomnitech2No ratings yet
- 03 - 01 - RN33153EN20GLA0 - Alarms Hadling PDFDocument47 pages03 - 01 - RN33153EN20GLA0 - Alarms Hadling PDFMan TheNo ratings yet
- Design of Elevator Monitoring and Alarm System Based On WimaxDocument5 pagesDesign of Elevator Monitoring and Alarm System Based On WimaxFelipe Raul Chumpitaz GNo ratings yet
- 1MAC307258-MB E DNP Point ListDocument60 pages1MAC307258-MB E DNP Point Listnicolás_lorréNo ratings yet
- Work Flow of Network Operation Centre For A Cellular Mobile SystemDocument3 pagesWork Flow of Network Operation Centre For A Cellular Mobile SystemDeepakNathNo ratings yet
- Royston .A. Dsouza-Ve-02Document30 pagesRoyston .A. Dsouza-Ve-02Royston DsouzaNo ratings yet
- DICOM Conformance Statement Eleva Workspot 2.0Document81 pagesDICOM Conformance Statement Eleva Workspot 2.0jory.almismary.95No ratings yet
- Driver Safety Awareness and Assistance SDocument6 pagesDriver Safety Awareness and Assistance SArvin Dexter De CastroNo ratings yet
- Irjet V7i4429 PDFDocument4 pagesIrjet V7i4429 PDFAbiy Mulu80No ratings yet
- s5 Samuel PDFDocument17 pagess5 Samuel PDFGriscelda PerezNo ratings yet
- Real-Time Hand Gesture Recognition Based On Modified Contour Chain Code Feature SetDocument8 pagesReal-Time Hand Gesture Recognition Based On Modified Contour Chain Code Feature SetMohammad AquibNo ratings yet
- Dss - Unit - 7 NotesDocument14 pagesDss - Unit - 7 NotesLavanya R GowdaNo ratings yet
- 【New Epc】Lsf Qj4149 - 1 (English)Document36 pages【New Epc】Lsf Qj4149 - 1 (English)prachan.nasomNo ratings yet
- DIY Hand Gesture Speaking SystemDocument21 pagesDIY Hand Gesture Speaking SystemAbelly MoshyNo ratings yet
- Drive Test Engineer - V2.0 - ENG - FG - TEL-Q6211 - PMKVYDocument118 pagesDrive Test Engineer - V2.0 - ENG - FG - TEL-Q6211 - PMKVYSnow iNo ratings yet
- FTNSDocument20 pagesFTNSKuldeep ChauhanNo ratings yet
- REF615 Modbuspoint 756581 ENcDocument48 pagesREF615 Modbuspoint 756581 ENcharrisvasNo ratings yet
- WDT V100R005C00SPC100 Propaganda Slides For Indonesia 201501Document56 pagesWDT V100R005C00SPC100 Propaganda Slides For Indonesia 201501Ronie MarxistNo ratings yet
- Trajectory of Hand Gesture Capturing Device For Sign Language RecognitionDocument3 pagesTrajectory of Hand Gesture Capturing Device For Sign Language RecognitionIJSTANo ratings yet
- Research On Application of Intelligent Operation and Maintenance in Conventional SubstationsDocument4 pagesResearch On Application of Intelligent Operation and Maintenance in Conventional SubstationsLopez CLNo ratings yet
- Anual: Movifit Function Level "System"Document92 pagesAnual: Movifit Function Level "System"مصطفى محمودNo ratings yet
- Global Detection - Electronic and Electromechanical Sensors Catalogue 2006.10 PDFDocument800 pagesGlobal Detection - Electronic and Electromechanical Sensors Catalogue 2006.10 PDFSarah RichardNo ratings yet
- MC CCTV Installation TechnicianDocument15 pagesMC CCTV Installation Technicianom prakashNo ratings yet
- Inbound 8953128780543689693Document7 pagesInbound 8953128780543689693Jasmin EspirituNo ratings yet
- Handbook On Study of Data Logger ReportsDocument43 pagesHandbook On Study of Data Logger ReportsCh SachinNo ratings yet
- Advanced Recloser Protection and Control RER620: Modbus Point List ManualDocument64 pagesAdvanced Recloser Protection and Control RER620: Modbus Point List ManualMovil44 Mgue HuinoilNo ratings yet
- DICOM Conformance Statement MultiDiagnost Eleva FD R6.1Document115 pagesDICOM Conformance Statement MultiDiagnost Eleva FD R6.1azurivrg100% (1)
- Automatic License Plate Recoganization System Based On Image Processing Using LabviewDocument5 pagesAutomatic License Plate Recoganization System Based On Image Processing Using LabviewNguyen Minh ThaiNo ratings yet
- BTPL IR MIS P1 PIVV FAT Web V1.0Document29 pagesBTPL IR MIS P1 PIVV FAT Web V1.0triveshNo ratings yet
- The Design of Wireless Biometric Attendance SystemDocument4 pagesThe Design of Wireless Biometric Attendance SystemChaitanya WaghuleNo ratings yet
- Design of Greenhouse Environment Remote Monitoring System Based On Android PlatformDocument6 pagesDesign of Greenhouse Environment Remote Monitoring System Based On Android PlatformJeyhan AgaoNo ratings yet
- Cell Outage Detection and Recovery. HuaweiDocument37 pagesCell Outage Detection and Recovery. HuaweiAmerNo ratings yet
- TransmiroDocument132 pagesTransmiroGrendel CooperNo ratings yet
- Pipelining and Vector ProcessingDocument8 pagesPipelining and Vector ProcessingThunderbeastNo ratings yet
- ObermairDocument6 pagesObermairVinicius ChrisosthemosNo ratings yet
- Optical Line Terminal Equipment Element Management System User ManualDocument19 pagesOptical Line Terminal Equipment Element Management System User ManualCesar PallaresNo ratings yet
- Optical Line Terminal Equipment Element Management System User ManualDocument19 pagesOptical Line Terminal Equipment Element Management System User ManualCesar PallaresNo ratings yet
- Robot Programming and MaintenanceDocument1 pageRobot Programming and Maintenancelopezeb97No ratings yet
- Real-Time Face Tracking System For Human-Robot Interact IonDocument6 pagesReal-Time Face Tracking System For Human-Robot Interact IonSAGAR JHA 14BEC1074No ratings yet
- Installation & Maintenance of Photocopiers and Printers1 - NSQFDocument12 pagesInstallation & Maintenance of Photocopiers and Printers1 - NSQFhenok zbeloNo ratings yet
- Project 1Document53 pagesProject 1suyash jainNo ratings yet
- Mosa Eas15 806Document26 pagesMosa Eas15 806Bojan KitanovskiNo ratings yet
- Brochure MultiPull 2021 EngDocument11 pagesBrochure MultiPull 2021 Engotavio carvalhoNo ratings yet
- Sample Cisco MGCP Gateway ConfigurationDocument4 pagesSample Cisco MGCP Gateway ConfigurationCristobal Andres Armijo BarrenecheaNo ratings yet
- Embedded System DesignDocument63 pagesEmbedded System DesignWana Bila100% (1)
- Troubleshooting Unified CommunicationDocument176 pagesTroubleshooting Unified Communicationmky212No ratings yet
- Akamai Technologies Case: by Thomas R. EisenmannDocument8 pagesAkamai Technologies Case: by Thomas R. EisenmannAbhishek_Majum_5454No ratings yet
- RFI Content Delivery PlatformDocument5 pagesRFI Content Delivery PlatformDakshata Vamsi TalasilaNo ratings yet
- Radware Certainty Support GuideDocument56 pagesRadware Certainty Support Guidebalamurali_aNo ratings yet
- Routing Fundamentals With Mikrotik: GLC Webinar, 1 December 2016 Achmad Mardiansyah GLC Networks, IndonesiaDocument33 pagesRouting Fundamentals With Mikrotik: GLC Webinar, 1 December 2016 Achmad Mardiansyah GLC Networks, IndonesiaNaz LunNo ratings yet
- 31401177-EchoLife HG850 GPON Terminal Service Manual - (V100R001 - 02)Document81 pages31401177-EchoLife HG850 GPON Terminal Service Manual - (V100R001 - 02)HammadAlviNo ratings yet
- GEHC DICOM Conformance - BrivoOEC715 785 865 VWKS1 XX - DOC1188156 - Rev3Document123 pagesGEHC DICOM Conformance - BrivoOEC715 785 865 VWKS1 XX - DOC1188156 - Rev3sec.ivbNo ratings yet
- MediaBrix Report 20122Document9 pagesMediaBrix Report 20122Juan Manuel GiraldezNo ratings yet
- ACT-15-97 Actifio DevOps White Paper-150605d-PqDocument7 pagesACT-15-97 Actifio DevOps White Paper-150605d-PqSebastian SejzerNo ratings yet
- Lecture 3Document39 pagesLecture 3Sherif HelmyNo ratings yet
- Md. Iftekharul Islam Sakib Lecturer Cse, BuetDocument45 pagesMd. Iftekharul Islam Sakib Lecturer Cse, BuetMd. Moniruzzaman100% (1)
- E10IS2 User Manual EnglishDocument68 pagesE10IS2 User Manual EnglishMihaiAdiNo ratings yet
- Untitled 1Document14 pagesUntitled 1Jagadeesh MajjiNo ratings yet
- Operating Systems CHAPTER 1 COMPLETE SOLUTION MADE BY ABHISHEK KUMARDocument9 pagesOperating Systems CHAPTER 1 COMPLETE SOLUTION MADE BY ABHISHEK KUMARAbhishemNo ratings yet
- AcknowledgementDocument20 pagesAcknowledgementAhnaf MustakinNo ratings yet
- CSE - 610 Lecture # 1Document35 pagesCSE - 610 Lecture # 1zaidNo ratings yet
- EN - Security Center 5.9 Network Diagram - VideoDocument1 pageEN - Security Center 5.9 Network Diagram - VideoJose Martin MotaNo ratings yet
- Logic Guide Texas InstrumentsDocument20 pagesLogic Guide Texas InstrumentsCristian RoblesNo ratings yet
- F5 Configuration - HTTPS WSS OffloadingDocument28 pagesF5 Configuration - HTTPS WSS Offloadingo0000oNo ratings yet
- 8051 and Advanced ProcessorDocument119 pages8051 and Advanced ProcessorAamir MehmoodNo ratings yet
- OsDocument4 pagesOsprachiNo ratings yet
- 08 Prod Name Structure en 1211Document11 pages08 Prod Name Structure en 1211Ioan LapadusNo ratings yet
- Peercast Users ManualDocument35 pagesPeercast Users ManualDavid Childers100% (4)
- WF3521Document4 pagesWF3521man_malayaNo ratings yet
- Spark Intreview FAQDocument21 pagesSpark Intreview FAQharanadhc100% (1)
























































































You might also like
- Delta5men PDFDocument21 pagesDelta5men PDFMOREENo ratings yet
- SAP BASIS Tutorial 3 Unix & Linux - SAP BASIS Administration and Learning TutorialsDocument13 pagesSAP BASIS Tutorial 3 Unix & Linux - SAP BASIS Administration and Learning Tutorialsvlsharma7100% (1)
- Pune Software Companies - List of IT Companies in PuneDocument6 pagesPune Software Companies - List of IT Companies in PuneChittaranjan Baral50% (2)
- Hand Gesture Based Camera Monitorning System Using Raspberry PiDocument4 pagesHand Gesture Based Camera Monitorning System Using Raspberry PidanangkitaNo ratings yet
- Hand Gesture Recognition in Images and Video: Ilan Steinberg, Tomer M. London, Dotan Di CastroDocument21 pagesHand Gesture Recognition in Images and Video: Ilan Steinberg, Tomer M. London, Dotan Di CastroSukh VirNo ratings yet
- Detection and Rectification of Distorted FingerprintsDocument7 pagesDetection and Rectification of Distorted FingerprintsEditor IJTSRDNo ratings yet
- Movipro Diagnóstico PPT Movipro-Sdc Diagnose Prozessdaten enDocument23 pagesMovipro Diagnóstico PPT Movipro-Sdc Diagnose Prozessdaten enAlfredo Jose Centeno CortesNo ratings yet
- Ijert Ijert: Vehicle License Plate Detection From Video Using Edge Detection and Morphological OperatorsDocument6 pagesIjert Ijert: Vehicle License Plate Detection From Video Using Edge Detection and Morphological OperatorsInderjeet SinghNo ratings yet
- A Real Time Embedded Finger Vein Recognition System For Authentication On Mobile DevicesDocument4 pagesA Real Time Embedded Finger Vein Recognition System For Authentication On Mobile DevicesRaghul RamasamyNo ratings yet
- Paris 2020Document10 pagesParis 2020Diogo do Espírito SantoNo ratings yet
- User Manual PrimaxDocument165 pagesUser Manual PrimaxElihu Vazquez100% (1)
- Autonomous EyeDocument7 pagesAutonomous EyeAnonymous kw8Yrp0R5rNo ratings yet
- Endev2 Indonesia:: Inspection Guide For Photovoltaic Village Power (PVVP) SystemsDocument55 pagesEndev2 Indonesia:: Inspection Guide For Photovoltaic Village Power (PVVP) SystemsElectricité & Instrumentation Gassi TouilNo ratings yet
- CCTV Installation TechnicianDocument331 pagesCCTV Installation TechnicianPartha SheeNo ratings yet
- DICOM Conformance Statement MicroDose L50 9.0Document83 pagesDICOM Conformance Statement MicroDose L50 9.0Javier PayáNo ratings yet
- New Report On Smartphone Cameras-3Document16 pagesNew Report On Smartphone Cameras-3Vaishnav GhadgeNo ratings yet
- Line Differential Protection and Control RED615: Modbus Point List ManualDocument44 pagesLine Differential Protection and Control RED615: Modbus Point List ManualIkram Ullah KakarNo ratings yet
- Bearing Fault Classification Using EnsemDocument20 pagesBearing Fault Classification Using EnsemAmag2011No ratings yet
- REF615 Modbuspoint 756581 ENdDocument52 pagesREF615 Modbuspoint 756581 ENdseluagloryNo ratings yet
- Motor Protection and Control REM615: Modbus Point List ManualDocument44 pagesMotor Protection and Control REM615: Modbus Point List Manualomnitech2No ratings yet
- 03 - 01 - RN33153EN20GLA0 - Alarms Hadling PDFDocument47 pages03 - 01 - RN33153EN20GLA0 - Alarms Hadling PDFMan TheNo ratings yet
- Design of Elevator Monitoring and Alarm System Based On WimaxDocument5 pagesDesign of Elevator Monitoring and Alarm System Based On WimaxFelipe Raul Chumpitaz GNo ratings yet
- 1MAC307258-MB E DNP Point ListDocument60 pages1MAC307258-MB E DNP Point Listnicolás_lorréNo ratings yet
- Work Flow of Network Operation Centre For A Cellular Mobile SystemDocument3 pagesWork Flow of Network Operation Centre For A Cellular Mobile SystemDeepakNathNo ratings yet
- Royston .A. Dsouza-Ve-02Document30 pagesRoyston .A. Dsouza-Ve-02Royston DsouzaNo ratings yet
- DICOM Conformance Statement Eleva Workspot 2.0Document81 pagesDICOM Conformance Statement Eleva Workspot 2.0jory.almismary.95No ratings yet
- Driver Safety Awareness and Assistance SDocument6 pagesDriver Safety Awareness and Assistance SArvin Dexter De CastroNo ratings yet
- Irjet V7i4429 PDFDocument4 pagesIrjet V7i4429 PDFAbiy Mulu80No ratings yet
- s5 Samuel PDFDocument17 pagess5 Samuel PDFGriscelda PerezNo ratings yet
- Real-Time Hand Gesture Recognition Based On Modified Contour Chain Code Feature SetDocument8 pagesReal-Time Hand Gesture Recognition Based On Modified Contour Chain Code Feature SetMohammad AquibNo ratings yet
- Dss - Unit - 7 NotesDocument14 pagesDss - Unit - 7 NotesLavanya R GowdaNo ratings yet
- 【New Epc】Lsf Qj4149 - 1 (English)Document36 pages【New Epc】Lsf Qj4149 - 1 (English)prachan.nasomNo ratings yet
- DIY Hand Gesture Speaking SystemDocument21 pagesDIY Hand Gesture Speaking SystemAbelly MoshyNo ratings yet
- Drive Test Engineer - V2.0 - ENG - FG - TEL-Q6211 - PMKVYDocument118 pagesDrive Test Engineer - V2.0 - ENG - FG - TEL-Q6211 - PMKVYSnow iNo ratings yet
- FTNSDocument20 pagesFTNSKuldeep ChauhanNo ratings yet
- REF615 Modbuspoint 756581 ENcDocument48 pagesREF615 Modbuspoint 756581 ENcharrisvasNo ratings yet
- WDT V100R005C00SPC100 Propaganda Slides For Indonesia 201501Document56 pagesWDT V100R005C00SPC100 Propaganda Slides For Indonesia 201501Ronie MarxistNo ratings yet
- Trajectory of Hand Gesture Capturing Device For Sign Language RecognitionDocument3 pagesTrajectory of Hand Gesture Capturing Device For Sign Language RecognitionIJSTANo ratings yet
- Research On Application of Intelligent Operation and Maintenance in Conventional SubstationsDocument4 pagesResearch On Application of Intelligent Operation and Maintenance in Conventional SubstationsLopez CLNo ratings yet
- Anual: Movifit Function Level "System"Document92 pagesAnual: Movifit Function Level "System"مصطفى محمودNo ratings yet
- Global Detection - Electronic and Electromechanical Sensors Catalogue 2006.10 PDFDocument800 pagesGlobal Detection - Electronic and Electromechanical Sensors Catalogue 2006.10 PDFSarah RichardNo ratings yet
- MC CCTV Installation TechnicianDocument15 pagesMC CCTV Installation Technicianom prakashNo ratings yet
- Inbound 8953128780543689693Document7 pagesInbound 8953128780543689693Jasmin EspirituNo ratings yet
- Handbook On Study of Data Logger ReportsDocument43 pagesHandbook On Study of Data Logger ReportsCh SachinNo ratings yet
- Advanced Recloser Protection and Control RER620: Modbus Point List ManualDocument64 pagesAdvanced Recloser Protection and Control RER620: Modbus Point List ManualMovil44 Mgue HuinoilNo ratings yet
- DICOM Conformance Statement MultiDiagnost Eleva FD R6.1Document115 pagesDICOM Conformance Statement MultiDiagnost Eleva FD R6.1azurivrg100% (1)
- Automatic License Plate Recoganization System Based On Image Processing Using LabviewDocument5 pagesAutomatic License Plate Recoganization System Based On Image Processing Using LabviewNguyen Minh ThaiNo ratings yet
- BTPL IR MIS P1 PIVV FAT Web V1.0Document29 pagesBTPL IR MIS P1 PIVV FAT Web V1.0triveshNo ratings yet
- The Design of Wireless Biometric Attendance SystemDocument4 pagesThe Design of Wireless Biometric Attendance SystemChaitanya WaghuleNo ratings yet
- Design of Greenhouse Environment Remote Monitoring System Based On Android PlatformDocument6 pagesDesign of Greenhouse Environment Remote Monitoring System Based On Android PlatformJeyhan AgaoNo ratings yet
- Cell Outage Detection and Recovery. HuaweiDocument37 pagesCell Outage Detection and Recovery. HuaweiAmerNo ratings yet
- TransmiroDocument132 pagesTransmiroGrendel CooperNo ratings yet
- Pipelining and Vector ProcessingDocument8 pagesPipelining and Vector ProcessingThunderbeastNo ratings yet
- ObermairDocument6 pagesObermairVinicius ChrisosthemosNo ratings yet
- Optical Line Terminal Equipment Element Management System User ManualDocument19 pagesOptical Line Terminal Equipment Element Management System User ManualCesar PallaresNo ratings yet
- Optical Line Terminal Equipment Element Management System User ManualDocument19 pagesOptical Line Terminal Equipment Element Management System User ManualCesar PallaresNo ratings yet
- Robot Programming and MaintenanceDocument1 pageRobot Programming and Maintenancelopezeb97No ratings yet
- Real-Time Face Tracking System For Human-Robot Interact IonDocument6 pagesReal-Time Face Tracking System For Human-Robot Interact IonSAGAR JHA 14BEC1074No ratings yet
- Installation & Maintenance of Photocopiers and Printers1 - NSQFDocument12 pagesInstallation & Maintenance of Photocopiers and Printers1 - NSQFhenok zbeloNo ratings yet
- Project 1Document53 pagesProject 1suyash jainNo ratings yet
- Mosa Eas15 806Document26 pagesMosa Eas15 806Bojan KitanovskiNo ratings yet
- Brochure MultiPull 2021 EngDocument11 pagesBrochure MultiPull 2021 Engotavio carvalhoNo ratings yet
- Sample Cisco MGCP Gateway ConfigurationDocument4 pagesSample Cisco MGCP Gateway ConfigurationCristobal Andres Armijo BarrenecheaNo ratings yet
- Embedded System DesignDocument63 pagesEmbedded System DesignWana Bila100% (1)
- Troubleshooting Unified CommunicationDocument176 pagesTroubleshooting Unified Communicationmky212No ratings yet
- Akamai Technologies Case: by Thomas R. EisenmannDocument8 pagesAkamai Technologies Case: by Thomas R. EisenmannAbhishek_Majum_5454No ratings yet
- RFI Content Delivery PlatformDocument5 pagesRFI Content Delivery PlatformDakshata Vamsi TalasilaNo ratings yet
- Radware Certainty Support GuideDocument56 pagesRadware Certainty Support Guidebalamurali_aNo ratings yet
- Routing Fundamentals With Mikrotik: GLC Webinar, 1 December 2016 Achmad Mardiansyah GLC Networks, IndonesiaDocument33 pagesRouting Fundamentals With Mikrotik: GLC Webinar, 1 December 2016 Achmad Mardiansyah GLC Networks, IndonesiaNaz LunNo ratings yet
- 31401177-EchoLife HG850 GPON Terminal Service Manual - (V100R001 - 02)Document81 pages31401177-EchoLife HG850 GPON Terminal Service Manual - (V100R001 - 02)HammadAlviNo ratings yet
- GEHC DICOM Conformance - BrivoOEC715 785 865 VWKS1 XX - DOC1188156 - Rev3Document123 pagesGEHC DICOM Conformance - BrivoOEC715 785 865 VWKS1 XX - DOC1188156 - Rev3sec.ivbNo ratings yet
- MediaBrix Report 20122Document9 pagesMediaBrix Report 20122Juan Manuel GiraldezNo ratings yet
- ACT-15-97 Actifio DevOps White Paper-150605d-PqDocument7 pagesACT-15-97 Actifio DevOps White Paper-150605d-PqSebastian SejzerNo ratings yet
- Lecture 3Document39 pagesLecture 3Sherif HelmyNo ratings yet
- Md. Iftekharul Islam Sakib Lecturer Cse, BuetDocument45 pagesMd. Iftekharul Islam Sakib Lecturer Cse, BuetMd. Moniruzzaman100% (1)
- E10IS2 User Manual EnglishDocument68 pagesE10IS2 User Manual EnglishMihaiAdiNo ratings yet
- Untitled 1Document14 pagesUntitled 1Jagadeesh MajjiNo ratings yet
- Operating Systems CHAPTER 1 COMPLETE SOLUTION MADE BY ABHISHEK KUMARDocument9 pagesOperating Systems CHAPTER 1 COMPLETE SOLUTION MADE BY ABHISHEK KUMARAbhishemNo ratings yet
- AcknowledgementDocument20 pagesAcknowledgementAhnaf MustakinNo ratings yet
- CSE - 610 Lecture # 1Document35 pagesCSE - 610 Lecture # 1zaidNo ratings yet
- EN - Security Center 5.9 Network Diagram - VideoDocument1 pageEN - Security Center 5.9 Network Diagram - VideoJose Martin MotaNo ratings yet
- Logic Guide Texas InstrumentsDocument20 pagesLogic Guide Texas InstrumentsCristian RoblesNo ratings yet
- F5 Configuration - HTTPS WSS OffloadingDocument28 pagesF5 Configuration - HTTPS WSS Offloadingo0000oNo ratings yet
- 8051 and Advanced ProcessorDocument119 pages8051 and Advanced ProcessorAamir MehmoodNo ratings yet
- OsDocument4 pagesOsprachiNo ratings yet
- 08 Prod Name Structure en 1211Document11 pages08 Prod Name Structure en 1211Ioan LapadusNo ratings yet
- Peercast Users ManualDocument35 pagesPeercast Users ManualDavid Childers100% (4)
- WF3521Document4 pagesWF3521man_malayaNo ratings yet
- Spark Intreview FAQDocument21 pagesSpark Intreview FAQharanadhc100% (1)