You might also like
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- The Beam V1.0Document20 pagesThe Beam V1.0Prashant GargNo ratings yet
- Materials Science and Technology of Optical FabricationFrom EverandMaterials Science and Technology of Optical FabricationNo ratings yet
- Robotics RV m1Document7 pagesRobotics RV m1Anonymous PfJgySfvNo ratings yet
- A Method For Off-Line Compensation of Cutting Force-Induced Errors in Robotic Machining by Tool Path ModificationDocument14 pagesA Method For Off-Line Compensation of Cutting Force-Induced Errors in Robotic Machining by Tool Path Modification无名No ratings yet
- Wheel Rail WearDocument11 pagesWheel Rail WearREHAZ100% (1)
- Lodes Robot Simulator in MATLABDocument7 pagesLodes Robot Simulator in MATLABPhạm Ngọc HòaNo ratings yet
- ROBOTKINEMATICSDocument26 pagesROBOTKINEMATICSsohamx2505No ratings yet
- Kinematics Modeling of A 4-DOF Robotic Arm: 2015 International Conference On Control, Automation and RoboticsDocument5 pagesKinematics Modeling of A 4-DOF Robotic Arm: 2015 International Conference On Control, Automation and Roboticsanon_731929628No ratings yet
- Analysis of Rolling Contact Fatigue Damage Initiation at The Wheel-Rail InterfaceDocument9 pagesAnalysis of Rolling Contact Fatigue Damage Initiation at The Wheel-Rail InterfaceVicky MtsNo ratings yet
- What Is A Parallel RobotDocument46 pagesWhat Is A Parallel Robotminh_bk0101No ratings yet
- Dynamic Analysis and SimulationDocument5 pagesDynamic Analysis and SimulationKamel FedaouiNo ratings yet
- Experiment - 02: Denavit and Hartenberg (DH) ParametersDocument6 pagesExperiment - 02: Denavit and Hartenberg (DH) ParametersManthan SinghNo ratings yet
- Experiment - 02: Denavit and Hartenberg (DH) ParametersDocument6 pagesExperiment - 02: Denavit and Hartenberg (DH) ParametersManthan SinghNo ratings yet
- Modeling Simulation and Position ControlDocument10 pagesModeling Simulation and Position Controlinesboumaiza293No ratings yet
- Software Updates Analyze Atoms MoleculesDocument15 pagesSoftware Updates Analyze Atoms MoleculesNorberto MonteiroNo ratings yet
- Modeling Puma Robot Using MatlabDocument3 pagesModeling Puma Robot Using MatlabJulio Luis Guzman MarañonNo ratings yet
- Modeling, Simulation and Position Control of 3DOF Articulated ManipulatorDocument10 pagesModeling, Simulation and Position Control of 3DOF Articulated Manipulatorbình nghuyễnNo ratings yet
- 5-DOF Manipulator Simulation Based On MATLAB Simulink MethodologyDocument6 pages5-DOF Manipulator Simulation Based On MATLAB Simulink MethodologyCh RajaNo ratings yet
- High Speed Trajectory Control of 2-Degree-Of-Freedom Robotic ArmDocument24 pagesHigh Speed Trajectory Control of 2-Degree-Of-Freedom Robotic ArmRameez HayatNo ratings yet
- Dynamic Remeshing and Applications: J. Vorsatz, Ch. R Ossl, and H.-P. SeidelDocument8 pagesDynamic Remeshing and Applications: J. Vorsatz, Ch. R Ossl, and H.-P. SeidelAntonio C. KeithNo ratings yet
- Experiment - 01: Denvit and Hartenberg (DH) ParametersDocument6 pagesExperiment - 01: Denvit and Hartenberg (DH) ParametersManthan SinghNo ratings yet
- Kinematics/Dynamics Analysis of a SolidWorks Designed Spatial Robot ArmDocument14 pagesKinematics/Dynamics Analysis of a SolidWorks Designed Spatial Robot Armpaulo baptistaNo ratings yet
- Kinmatics Invese CalcuDocument6 pagesKinmatics Invese CalcukinfegetaNo ratings yet
- JournalNX - Simulink Passive SuspensionDocument4 pagesJournalNX - Simulink Passive SuspensionJournalNX - a Multidisciplinary Peer Reviewed JournalNo ratings yet
- 2023 Kinematic Calibration of A 5-DOF Hybrid Machining Robot Using An Extended Kalman Filter MethodDocument8 pages2023 Kinematic Calibration of A 5-DOF Hybrid Machining Robot Using An Extended Kalman Filter MethodThanh Hai NguyenNo ratings yet
- Mechanical Engineering and SciencesDocument9 pagesMechanical Engineering and ScienceswarnoiseNo ratings yet
- Multi-Robot Mapping and Navigation Using Topological FeaturesDocument6 pagesMulti-Robot Mapping and Navigation Using Topological FeaturesSiddharth UNo ratings yet
- Breadth Cam Profile Design With Oscillating Roller Follower: August 2010Document8 pagesBreadth Cam Profile Design With Oscillating Roller Follower: August 2010Tri PujiyantoNo ratings yet
- Lodes Robot Simulator in MATLAB PDFDocument7 pagesLodes Robot Simulator in MATLAB PDFRuan SantosNo ratings yet
- Robot StanfordDocument8 pagesRobot StanfordLong TrầnNo ratings yet
- IgnestiMariniMeliRindi PaperDocument20 pagesIgnestiMariniMeliRindi Paperbalaji817150No ratings yet
- Motion Analysis of 4 Axis Robotic Arm With Inverse Kinematics For Industrial ApplicationDocument9 pagesMotion Analysis of 4 Axis Robotic Arm With Inverse Kinematics For Industrial ApplicationAkky AkkyNo ratings yet
- Multicriterion Optimization of Multistage Gear Train TransmissionDocument9 pagesMulticriterion Optimization of Multistage Gear Train TransmissionRiad RamadaniNo ratings yet
- Resolution Independent Curve Rendering Using Programmable Graphics HardwareDocument10 pagesResolution Independent Curve Rendering Using Programmable Graphics HardwarearanhilNo ratings yet
- The Mathematical Model and Direct Kinematics Solution Analysis of Delta Parallel RobotDocument5 pagesThe Mathematical Model and Direct Kinematics Solution Analysis of Delta Parallel Robotfilipe o toscoNo ratings yet
- Design of A 3 Dof Robotic Arm: August 2016Document6 pagesDesign of A 3 Dof Robotic Arm: August 2016Naeem MalikNo ratings yet
- Mathematical Model of Two-Dof Five Links Closed-Chain Mechanism (Pantograph)Document15 pagesMathematical Model of Two-Dof Five Links Closed-Chain Mechanism (Pantograph)Quyết Nguyễn CôngNo ratings yet
- Direct Kinematic Modeling of 6R Robot Using Robotics ToolboxDocument4 pagesDirect Kinematic Modeling of 6R Robot Using Robotics ToolboxNedim BabicNo ratings yet
- Dynamic of HS Railway BridgesDocument8 pagesDynamic of HS Railway BridgesNuno Telmo Lopes100% (1)
- Modeling and Simulation of Four-Bar Planar Mechanisms Using AdamsDocument7 pagesModeling and Simulation of Four-Bar Planar Mechanisms Using AdamsIAEME PublicationNo ratings yet
- The Foundation of The DLR RailwayDynamics Library Wheel Rail ContactDocument11 pagesThe Foundation of The DLR RailwayDynamics Library Wheel Rail ContactSTBz09No ratings yet
- Module 1Document45 pagesModule 1SohanNo ratings yet
- CAD Project 05 Report FinalDocument52 pagesCAD Project 05 Report Finalsidhant_rockNo ratings yet
- Design and Analysis of Railway Casnub Bogie Using FemDocument5 pagesDesign and Analysis of Railway Casnub Bogie Using FemmiladNo ratings yet
- 47 & 01 Project ReportDocument19 pages47 & 01 Project ReportRohan SharmaNo ratings yet
- Simultaneous Estimation of Wheel-Rail Adhesion and Brake Friction BehaviourDocument6 pagesSimultaneous Estimation of Wheel-Rail Adhesion and Brake Friction BehaviourManjunath AithalNo ratings yet
- Analysis of Fatigue Characteristics of Gears Based On Ncode DesignlifeDocument6 pagesAnalysis of Fatigue Characteristics of Gears Based On Ncode DesignlifeTUTUNo ratings yet
- A Defect Recognition System For Automated Inspection of Non-Rigid SurfacesDocument6 pagesA Defect Recognition System For Automated Inspection of Non-Rigid SurfacesSebastian Von EnzbergNo ratings yet
- Journal of Mechanical Design Volume 125 Issue 4 2003 (Doi 10.1115/1.1625403) Achtmann, J. Bär, G. - Optimized Bearing Ellipses of Hypoid GearsDocument7 pagesJournal of Mechanical Design Volume 125 Issue 4 2003 (Doi 10.1115/1.1625403) Achtmann, J. Bär, G. - Optimized Bearing Ellipses of Hypoid GearsFrank WhittleNo ratings yet
- Effect of Non Uniformity Factors and Assignment Factors On Errors in Charge Simulation Method With Point Charge ModelDocument5 pagesEffect of Non Uniformity Factors and Assignment Factors On Errors in Charge Simulation Method With Point Charge ModelDadi AzizNo ratings yet
- Simulation of Mobile Robot Navigation With Sensor Fusion On An Uneven PathDocument6 pagesSimulation of Mobile Robot Navigation With Sensor Fusion On An Uneven PathIon TomitaNo ratings yet
- Paper6253 2632Document11 pagesPaper6253 2632Tho Ho DucNo ratings yet
- Assignment IIIDocument6 pagesAssignment IIIyemanerashefordNo ratings yet
- E6E3E5E4CFDocument10 pagesE6E3E5E4CFSanket ChaudharyNo ratings yet
- Model Updating and Validation of A Dual-Rotor System: H. Miao, C. Zang, M. FriswellDocument16 pagesModel Updating and Validation of A Dual-Rotor System: H. Miao, C. Zang, M. FriswellPhuor TyNo ratings yet
- ADAMS/MATLAB Co SimulationDocument6 pagesADAMS/MATLAB Co SimulationkranthiNo ratings yet
- CA - Part IDocument6 pagesCA - Part I梅槑No ratings yet
- Tire Road Surface Conditions and 2D Curve Analysis Based Development of Surrogate Safety MeasuresDocument8 pagesTire Road Surface Conditions and 2D Curve Analysis Based Development of Surrogate Safety MeasuresbijejournalNo ratings yet
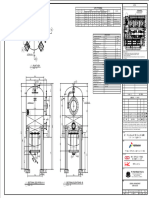
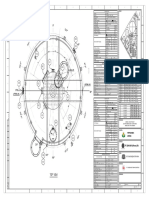
- Sand Filter-rwtp (1)Document6 pagesSand Filter-rwtp (1)Abu SuraisyNo ratings yet
- 0083_2_PHB (Tangki WWTP)-RevDocument4 pages0083_2_PHB (Tangki WWTP)-RevAbu SuraisyNo ratings yet
- Wwtp Feed PumpDocument2 pagesWwtp Feed PumpAbu SuraisyNo ratings yet
- Naocl Tank RwtpDocument2 pagesNaocl Tank RwtpAbu SuraisyNo ratings yet
- Coagulant Tank-rwtp (2) (1)Document3 pagesCoagulant Tank-rwtp (2) (1)Abu SuraisyNo ratings yet
- Captureof CO2 From AutomobileexhaustDocument2 pagesCaptureof CO2 From AutomobileexhaustAbu SuraisyNo ratings yet
- Integrity Analysis of Bed StrainerDocument6 pagesIntegrity Analysis of Bed StrainerAbu SuraisyNo ratings yet
- Dimensionless Velocity & Temperature DistributionDocument21 pagesDimensionless Velocity & Temperature DistributionAbu SuraisyNo ratings yet
- Httpcpe Czasopisma Pan Plimagesdatacpewydaniano3201202propertiesofactivecarbonwithvariousparticlDocument10 pagesHttpcpe Czasopisma Pan Plimagesdatacpewydaniano3201202propertiesofactivecarbonwithvariousparticlAbu SuraisyNo ratings yet
- Natural Gas Receiving Terminal Technology OverviewDocument7 pagesNatural Gas Receiving Terminal Technology OverviewAbu SuraisyNo ratings yet
- Applied Sciences: Carbon Dioxide Adsorption On Porous and Functionalized Activated Carbon FibersDocument15 pagesApplied Sciences: Carbon Dioxide Adsorption On Porous and Functionalized Activated Carbon FibersAbu SuraisyNo ratings yet
- PHB Strength Calculation - Softener Pressure Vessel 09.09.19Document7 pagesPHB Strength Calculation - Softener Pressure Vessel 09.09.19Abu SuraisyNo ratings yet
- 201485-37000-MC04 - PI Spec Piping Stress AnalysisDocument14 pages201485-37000-MC04 - PI Spec Piping Stress AnalysisAbu SuraisyNo ratings yet
- Tugas SolarDocument5 pagesTugas SolarAbu SuraisyNo ratings yet
- Tugas Mata Kuliah Metodologi Penelitian (AE6000)Document2 pagesTugas Mata Kuliah Metodologi Penelitian (AE6000)Abu SuraisyNo ratings yet
- Master's Statement at KAUST on Lightweight StructuresDocument3 pagesMaster's Statement at KAUST on Lightweight StructuresAbu Suraisy100% (1)
- Product Handbook Structureal Steel PDFDocument175 pagesProduct Handbook Structureal Steel PDFRanu JanuarNo ratings yet
- Medium SteamDocument139 pagesMedium SteamAbu SuraisyNo ratings yet
- Datasheet Steam Trap03022017Document4 pagesDatasheet Steam Trap03022017Abu SuraisyNo ratings yet
- Cross SectDocument1 pageCross SectAbu SuraisyNo ratings yet
- Degasifier 18-02-2017 Sheet 1Document1 pageDegasifier 18-02-2017 Sheet 1Abu SuraisyNo ratings yet
- WindDocument6 pagesWindAbu SuraisyNo ratings yet
- Ultra Filtration: 201485 Mechanical Data Sheet REV 2 201485-Z20212-01 Ammonia-Urea Ii Project Proj NoDocument2 pagesUltra Filtration: 201485 Mechanical Data Sheet REV 2 201485-Z20212-01 Ammonia-Urea Ii Project Proj NoAbu SuraisyNo ratings yet
- Straightforward Material Section: Xlpe vs. FRPDocument2 pagesStraightforward Material Section: Xlpe vs. FRPAbu SuraisyNo ratings yet
- Pipe Stress Analysis of Steam Line 4MS-20201-ED1-HDocument11 pagesPipe Stress Analysis of Steam Line 4MS-20201-ED1-HAbu SuraisyNo ratings yet
- Ansi b36.10 Pipe SizeDocument9 pagesAnsi b36.10 Pipe SizeSpoonful BurnsideNo ratings yet
- BGR1 SPBGDocument1 pageBGR1 SPBGAbu SuraisyNo ratings yet
- Dago Engineering Consultant Employees Monthly Time ReportDocument1 pageDago Engineering Consultant Employees Monthly Time ReportAbu SuraisyNo ratings yet
- Composites OverviewDocument15 pagesComposites OverviewSantosh OjhaNo ratings yet
- Analysis of CFAR Detection With Multiple Pulses Transmission Case in Pareto Distributed ClutterDocument6 pagesAnalysis of CFAR Detection With Multiple Pulses Transmission Case in Pareto Distributed ClutterZellagui EnergyNo ratings yet
- Synopsis On Customer Satisfaction On Internet BankingDocument5 pagesSynopsis On Customer Satisfaction On Internet BankingHitesh Chune100% (1)
- Improve Asset Performance with Integrated Asset ManagementDocument12 pagesImprove Asset Performance with Integrated Asset ManagementArun KarthikeyanNo ratings yet
- PGDBF Project GuidelinesDocument9 pagesPGDBF Project Guidelineskaw_anchalNo ratings yet
- Negotiable Instruments Law ReviewerDocument18 pagesNegotiable Instruments Law Reviewernoorlaw100% (2)
- 06-08 Civic Grid Charger 1 - 1Document4 pages06-08 Civic Grid Charger 1 - 1MilosNo ratings yet
- Breast Problems After DeviveryDocument19 pagesBreast Problems After DeviverySanthosh.S.UNo ratings yet
- How to enter foreign currency transactions in TallyDocument4 pagesHow to enter foreign currency transactions in TallySrinivas RaoNo ratings yet
- Pert and CPM Detailed - Session-1Document42 pagesPert and CPM Detailed - Session-1azsrxNo ratings yet
- Marquez Vs Comelec GR 112889Document1 pageMarquez Vs Comelec GR 112889JFA100% (1)
- Order in Respect of Application Filed by Munjal M Jaykrishna Family Trust Under Regulation 11 of Takeover Regulations, 2011 For Acquisition of Shares in AksharChem (India) LimitedDocument10 pagesOrder in Respect of Application Filed by Munjal M Jaykrishna Family Trust Under Regulation 11 of Takeover Regulations, 2011 For Acquisition of Shares in AksharChem (India) LimitedShyam SunderNo ratings yet
- BSC6900 GSM Technical Description (V900R012C01 - 02)Document113 pagesBSC6900 GSM Technical Description (V900R012C01 - 02)Mohammad Mosabbirul IslamNo ratings yet
- B757-767 Series: by Flightfactor and Steptosky For X-Plane 11.35+ Produced by VmaxDocument35 pagesB757-767 Series: by Flightfactor and Steptosky For X-Plane 11.35+ Produced by VmaxDave91No ratings yet
- CBR A Drug DevelopDocument2 pagesCBR A Drug DevelopAlfieNo ratings yet
- Operator E-Jets News Rel 030Document16 pagesOperator E-Jets News Rel 030jivomirNo ratings yet
- An 124Document4 pagesAn 124Ank Electro FuzzNo ratings yet
- Enercalc ManualDocument608 pagesEnercalc Manualrekstrom0% (1)
- iC60L Circuit Breakers (Curve B, C, K, Z)Document1 pageiC60L Circuit Breakers (Curve B, C, K, Z)Diego PeñaNo ratings yet
- BFN 111 - Week 1Document20 pagesBFN 111 - Week 1CHIDINMA ONUORAHNo ratings yet
- Mesalazine: Mesalazine (INN, BAN), Also Known As Mesalamine (USAN) or 5-Aminosalicylic AcidDocument4 pagesMesalazine: Mesalazine (INN, BAN), Also Known As Mesalamine (USAN) or 5-Aminosalicylic AcidAnkan PalNo ratings yet
- Sirius-4 4 29-Manual PDFDocument49 pagesSirius-4 4 29-Manual PDFJovanderson JacksonNo ratings yet
- MOBISEC 2020 - 15 - Mobile MalwareDocument64 pagesMOBISEC 2020 - 15 - Mobile MalwareBobbylovesvickieNo ratings yet
- Arm Multiple ChoiceDocument4 pagesArm Multiple ChoiceStalin Sbr33% (9)
- 3hac13347 1Document18 pages3hac13347 1CJ MallickNo ratings yet
- String & Math FunctionsDocument38 pagesString & Math FunctionsThanu shreeNo ratings yet
- P200(2页)Document2 pagesP200(2页)guwniarzykNo ratings yet
- CS3352 - Digital Principles and Computer Organization LaboratoryDocument55 pagesCS3352 - Digital Principles and Computer Organization Laboratoryakshaya vijay100% (6)
- Chap 21 Machining FundamentalsDocument87 pagesChap 21 Machining FundamentalsLê Văn HòaNo ratings yet
- Income Tax Raids: Procedures and RightsDocument4 pagesIncome Tax Raids: Procedures and RightsshanikaNo ratings yet
- GAD Project ProposalDocument2 pagesGAD Project ProposalMa. Danessa T. BulingitNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Algorithms to Live By: The Computer Science of Human DecisionsFrom EverandAlgorithms to Live By: The Computer Science of Human DecisionsRating: 4.5 out of 5 stars4.5/5 (722)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- Defensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityFrom EverandDefensive Cyber Mastery: Expert Strategies for Unbeatable Personal and Business SecurityRating: 5 out of 5 stars5/5 (1)
- Chaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyFrom EverandChaos Monkeys: Obscene Fortune and Random Failure in Silicon ValleyRating: 3.5 out of 5 stars3.5/5 (111)
- CompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideFrom EverandCompTIA Security+ Get Certified Get Ahead: SY0-701 Study GuideRating: 5 out of 5 stars5/5 (2)
- Cyber War: The Next Threat to National Security and What to Do About ItFrom EverandCyber War: The Next Threat to National Security and What to Do About ItRating: 3.5 out of 5 stars3.5/5 (66)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Dark Data: Why What You Don’t Know MattersFrom EverandDark Data: Why What You Don’t Know MattersRating: 4.5 out of 5 stars4.5/5 (3)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- Everybody Lies: Big Data, New Data, and What the Internet Can Tell Us About Who We Really AreFrom EverandEverybody Lies: Big Data, New Data, and What the Internet Can Tell Us About Who We Really AreRating: 4.5 out of 5 stars4.5/5 (911)
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Designing Data-Intensive Applications: The Big Ideas Behind Reliable, Scalable, and Maintainable SystemsFrom EverandDesigning Data-Intensive Applications: The Big Ideas Behind Reliable, Scalable, and Maintainable SystemsRating: 5 out of 5 stars5/5 (6)
- The Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectFrom EverandThe Simulated Multiverse: An MIT Computer Scientist Explores Parallel Universes, The Simulation Hypothesis, Quantum Computing and the Mandela EffectRating: 4.5 out of 5 stars4.5/5 (20)
- Excel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceFrom EverandExcel Essentials: A Step-by-Step Guide with Pictures for Absolute Beginners to Master the Basics and Start Using Excel with ConfidenceNo ratings yet
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- Midjourney Mastery - The Ultimate Handbook of PromptsFrom EverandMidjourney Mastery - The Ultimate Handbook of PromptsRating: 4.5 out of 5 stars4.5/5 (2)
- Data-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseFrom EverandData-ism: The Revolution Transforming Decision Making, Consumer Behavior, and Almost Everything ElseRating: 3.5 out of 5 stars3.5/5 (12)
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)From EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Rating: 4 out of 5 stars4/5 (1)