You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Ignition SystemDocument10 pagesIgnition SystemParag100% (1)
- OLTC Control Diagram PDFDocument20 pagesOLTC Control Diagram PDFThant ZinNo ratings yet
- 2 (A) - TAC32 ManualDocument244 pages2 (A) - TAC32 ManualNick100% (2)
- ElectricityDocument22 pagesElectricitykavya_repalaNo ratings yet
- Example Substation Insulation Coordination Study by ArresterWorksDocument21 pagesExample Substation Insulation Coordination Study by ArresterWorksqais652002100% (3)
- Interview Questions For Eee StudentsDocument11 pagesInterview Questions For Eee StudentsAli ZafarNo ratings yet
- Master Chilled Wate Entrance No HX Rev JMD 20120817-1Document8 pagesMaster Chilled Wate Entrance No HX Rev JMD 20120817-1AshNo ratings yet
- Easy 3000 Installation ManualDocument52 pagesEasy 3000 Installation ManualHalit Yalçınkaya100% (1)
- A New Conception of Science: Orthodoxy Refuted Any Scientific Theory, However Well VerifiedDocument6 pagesA New Conception of Science: Orthodoxy Refuted Any Scientific Theory, However Well VerifiedAshNo ratings yet
- Mathematics Sr. No. Core Areas PercentageDocument11 pagesMathematics Sr. No. Core Areas PercentageAshNo ratings yet
- Abridged Us Sailing RulessdfdsfDocument12 pagesAbridged Us Sailing RulessdfdsfAshNo ratings yet
- Mbo 002141794 S 1dfsdDocument7 pagesMbo 002141794 S 1dfsdAshNo ratings yet
- Morris Internet MediationDocument18 pagesMorris Internet MediationAshNo ratings yet
- Meaning Presentatisdfsdfon - SandDocument7 pagesMeaning Presentatisdfsdfon - SandAshNo ratings yet
- MS-9600 Eng SpecDocument12 pagesMS-9600 Eng SpecAshNo ratings yet
- Curriculum Vitae: 1. Personal DetailsDocument3 pagesCurriculum Vitae: 1. Personal DetailsAshNo ratings yet
- P - Z) For Pressure Variation in A Liquid Due To F VDocument2 pagesP - Z) For Pressure Variation in A Liquid Due To F VAshNo ratings yet
- Weight Mass LabddsfdfsdfsDocument1 pageWeight Mass LabddsfdfsdfsAshNo ratings yet
- End Examination Form For B.Arch. General (2010 Pattern) - V22Document4 pagesEnd Examination Form For B.Arch. General (2010 Pattern) - V22AshNo ratings yet
- Buoyancy: Activity: (Written in 2003 by Don Yost)Document2 pagesBuoyancy: Activity: (Written in 2003 by Don Yost)AshNo ratings yet
- Projectile Motion Under The Influence of Gravity, But With No Air Resistance. If We Fire ADocument6 pagesProjectile Motion Under The Influence of Gravity, But With No Air Resistance. If We Fire AAshNo ratings yet
- Cege-3-Handout 01 Writing GuidelinesDocument13 pagesCege-3-Handout 01 Writing GuidelinesAshNo ratings yet
- Document and RecordDocument1 pageDocument and RecordAshNo ratings yet
- Step by Step For Activity 5 1. Open The Application HEC-RAS 4.1.0Document1 pageStep by Step For Activity 5 1. Open The Application HEC-RAS 4.1.0AshNo ratings yet
- Sample Tehnical Report - Fax Machines (Sample of A Technical Report)Document3 pagesSample Tehnical Report - Fax Machines (Sample of A Technical Report)AshNo ratings yet
- Ib33 790 1 PDFDocument96 pagesIb33 790 1 PDF322399mk7086No ratings yet
- Wharfedale Pro-Mp2800 SMDocument10 pagesWharfedale Pro-Mp2800 SMJavierNo ratings yet
- Pulse Transf 4Document2 pagesPulse Transf 4GiraldoCarpioRamosNo ratings yet
- Leroy Somer r120 Avr DatasheetDocument16 pagesLeroy Somer r120 Avr DatasheetalexdanniNo ratings yet
- Flush Mounted, PIR, Presence/absence Detector: EBDSPIR-PRM - PRM Switching, Compact, IP40, CeilingDocument2 pagesFlush Mounted, PIR, Presence/absence Detector: EBDSPIR-PRM - PRM Switching, Compact, IP40, CeilingSimple LangNo ratings yet
- Powerflex4M User ManualDocument118 pagesPowerflex4M User ManualEr. Piush Jindal75% (8)
- PATMD-LW Series Trifold 20200212Document2 pagesPATMD-LW Series Trifold 20200212Taacsa MatrizNo ratings yet
- Electric Filed Mill PartsDocument3 pagesElectric Filed Mill PartsNilesh NarkhedeNo ratings yet
- Burnerlogix Replacement Options For Honeywell 7800 SeriesDocument3 pagesBurnerlogix Replacement Options For Honeywell 7800 SeriesedgarNo ratings yet
- XB16 PDFDocument2 pagesXB16 PDFROYNo ratings yet
- CC 12X14 600V RamcroDocument1 pageCC 12X14 600V RamcroOscar NaranjoNo ratings yet
- Electronics Blueprint 1puc 2023 - 24Document3 pagesElectronics Blueprint 1puc 2023 - 24sanjaykashiNo ratings yet
- Sa Akx90ph, Sa Akx90prDocument146 pagesSa Akx90ph, Sa Akx90prAlfredo Valencia RodriguezNo ratings yet
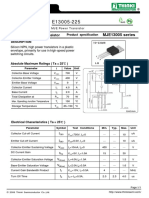
- E13005 225 PDFDocument1 pageE13005 225 PDFDani ChisNo ratings yet
- Cable Ratings & Volt Drop Master File 1Document20 pagesCable Ratings & Volt Drop Master File 1simkuringjalmi77No ratings yet
- Physics Project-1Document17 pagesPhysics Project-1QwertyNo ratings yet
- Hoja de Especificación Del MultímetroDocument2 pagesHoja de Especificación Del MultímetroSara DiSuNo ratings yet
- Peee Notes Unit IIIDocument49 pagesPeee Notes Unit IIIPujita JNo ratings yet
- Sfe Pba300-1500 PDFDocument10 pagesSfe Pba300-1500 PDFaliNo ratings yet
- OnLine MonitoringOn BushingDocument8 pagesOnLine MonitoringOn BushingSISWANTONo ratings yet
- WE Energies Facility Planning Guide: Book1: UndergroundservicesDocument32 pagesWE Energies Facility Planning Guide: Book1: UndergroundservicesfranklynberryNo ratings yet
- Procdure For ACB and VCBDocument4 pagesProcdure For ACB and VCBMelkin NPNo ratings yet