You might also like
- Paper Model - WikipediaDocument18 pagesPaper Model - WikipediaOrigami toturial by AbhijeetNo ratings yet
- PETREL 12 Well EngineeringDocument30 pagesPETREL 12 Well EngineeringKuala TamboraNo ratings yet
- Non-Linear Structures: Matrix Methods of Analysis and Design by ComputersFrom EverandNon-Linear Structures: Matrix Methods of Analysis and Design by ComputersRating: 4.5 out of 5 stars4.5/5 (2)
- Thesis Topics in Oil and Gas LawDocument7 pagesThesis Topics in Oil and Gas Lawkathymillerminneapolis100% (2)
- Audit Plan and ProgramDocument35 pagesAudit Plan and ProgramReginald ValenciaNo ratings yet
- (Solid Mechanics and Its Applications 26) M. A. Gonzalez-Palacios, J. Angeles (Auth.) - Cam Synthesis-Springer Netherlands (1993)Document260 pages(Solid Mechanics and Its Applications 26) M. A. Gonzalez-Palacios, J. Angeles (Auth.) - Cam Synthesis-Springer Netherlands (1993)karpouzadNo ratings yet
- Eu Furniture MarketDocument307 pagesEu Furniture MarketCarolina0% (1)
- Heat Rate Improvement Reference Manual TR-109546Document301 pagesHeat Rate Improvement Reference Manual TR-109546AntoniusMahendraAdhi100% (5)
- Att 2 HSE Action PlanDocument3 pagesAtt 2 HSE Action PlanAbdul Hakam Mohamed Yusof100% (2)
- Constitutive Model For Full-Range Elasto-Plastic Behavior of Structural Steels With Yield Plateau Formulation (Hu, Et Al. 2016)Document12 pagesConstitutive Model For Full-Range Elasto-Plastic Behavior of Structural Steels With Yield Plateau Formulation (Hu, Et Al. 2016)Jose ManuelNo ratings yet
- 3D Printing of Robotic Soft Actuators WithDocument9 pages3D Printing of Robotic Soft Actuators WithPringgo Widyo LaksonoNo ratings yet
- AbaqusDocument11 pagesAbaquskothapalli21100% (1)
- Pollution Lesson PlanDocument5 pagesPollution Lesson Planapi-300889911100% (9)
- Origami Real INTRO - WikipediaDocument61 pagesOrigami Real INTRO - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Mba Project "A COMPREHENSIVE STUDY OF MARKETING COMMUNICATION EFFECT ON THE CONSUMERS"Document102 pagesMba Project "A COMPREHENSIVE STUDY OF MARKETING COMMUNICATION EFFECT ON THE CONSUMERS"Hament Singh100% (3)
- Integrated Optimization of Actuators and Structural Topology of Piezoelectric Composite Structures For Static Shape ControlDocument30 pagesIntegrated Optimization of Actuators and Structural Topology of Piezoelectric Composite Structures For Static Shape Controlsubhra_civ658No ratings yet
- 1 s2.0 S0264127519304381 MainDocument13 pages1 s2.0 S0264127519304381 Maingus.sukkasigNo ratings yet
- Act 3Document16 pagesAct 3Nida AkNo ratings yet
- Energies 11 02687Document17 pagesEnergies 11 02687Lucas ErburuNo ratings yet
- Con Spring 3Document15 pagesCon Spring 3scoobymehrotra27No ratings yet
- Experimental and Analytical Analysis of Thermoplastic Reinforced Composite Sheet Deep DrawingDocument13 pagesExperimental and Analytical Analysis of Thermoplastic Reinforced Composite Sheet Deep DrawingbehzadNo ratings yet
- 1 s2.0 S2214785322045953 MainDocument7 pages1 s2.0 S2214785322045953 Mainmarkpoland21No ratings yet
- MCM Research Article-2Document32 pagesMCM Research Article-22707SAKSHI TONDENo ratings yet
- Terri Ault 2006Document14 pagesTerri Ault 2006ChristopherElPadrinoCardenasNo ratings yet
- Nada ShabaanDocument15 pagesNada ShabaanNada ShabanNo ratings yet
- Ling 2016Document12 pagesLing 2016Ho Nhat LinhNo ratings yet
- Composite Structures: Van-Nam Hoang, Phuong Tran, Van-Tuyen Vu, H. Nguyen-XuanDocument13 pagesComposite Structures: Van-Nam Hoang, Phuong Tran, Van-Tuyen Vu, H. Nguyen-Xuanezbai Aparicio SandovalNo ratings yet
- Materials: Overview and Future Advanced Engineering Applications For Morphing Surfaces by Shape Memory Alloy MaterialsDocument19 pagesMaterials: Overview and Future Advanced Engineering Applications For Morphing Surfaces by Shape Memory Alloy MaterialsKrishna Mohan ChowdaryNo ratings yet
- Robot 6 DofDocument5 pagesRobot 6 DofMiguel PérezNo ratings yet
- International Journal of Non-Linear Mechanics: Larissa M. Fonseca, Marcelo A. SaviDocument19 pagesInternational Journal of Non-Linear Mechanics: Larissa M. Fonseca, Marcelo A. Savigbook picsNo ratings yet
- Fonseca2020 PDFDocument19 pagesFonseca2020 PDFgbook picsNo ratings yet
- Ecaadesigradi2019 300Document10 pagesEcaadesigradi2019 300eeman siaNo ratings yet
- Jmse 07 00340 v2Document24 pagesJmse 07 00340 v2JangdiniNo ratings yet
- Composites Science and Technology - 71!15!2011Document25 pagesComposites Science and Technology - 71!15!2011Luis Miguel Perez PertuzNo ratings yet
- A Study On The Dynamic Behaviour of Lightweight GeDocument13 pagesA Study On The Dynamic Behaviour of Lightweight GeOmair Nisar KhanNo ratings yet
- Construction and Building Materials: Xunhao Ding, Tao Ma, Wang GaoDocument14 pagesConstruction and Building Materials: Xunhao Ding, Tao Ma, Wang GaoHeiro KeystrifeNo ratings yet
- Bio Inspired Design of Electrically DrivDocument21 pagesBio Inspired Design of Electrically DrivNavneet HoodaNo ratings yet
- Đa Thân Để Chia Lưới Bánh Răng Xoắn Và Bánh Răng Xoắn Dựa Trên Các Tính Toán Tiếp Xúc Ba Chiều Chi TiếDocument18 pagesĐa Thân Để Chia Lưới Bánh Răng Xoắn Và Bánh Răng Xoắn Dựa Trên Các Tính Toán Tiếp Xúc Ba Chiều Chi TiếDương CaoNo ratings yet
- 1 s2.0 S1359836818306036 MainDocument12 pages1 s2.0 S1359836818306036 Maincm.torvergataNo ratings yet
- Lattice ProgramaDocument12 pagesLattice ProgramaguinoytitoNo ratings yet
- Use and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperDocument5 pagesUse and Benefits of Kinematics Inversion of Single Slider Mechanism A Review PaperRockerss RockerssNo ratings yet
- A - Simplified - Flexible - Multibody - Dynamics - For - A - Main Landing GearDocument11 pagesA - Simplified - Flexible - Multibody - Dynamics - For - A - Main Landing GearSoma VargaNo ratings yet
- Computer Methods in Applied Mechanics - Applications of Point Interpolation Method For Spatial General Shells StructuresDocument15 pagesComputer Methods in Applied Mechanics - Applications of Point Interpolation Method For Spatial General Shells StructuresRichard LiuNo ratings yet
- 4 - Analysis of Wind Turbine Blades Aeroelastic Performance Under Yaw ConditionsDocument12 pages4 - Analysis of Wind Turbine Blades Aeroelastic Performance Under Yaw ConditionsMayra ZezattiNo ratings yet
- Kelvin CellDocument12 pagesKelvin CellR TharunishNo ratings yet
- Three Dimensional Finite Element Modeling of FlexiDocument15 pagesThree Dimensional Finite Element Modeling of Flexiaji raNo ratings yet
- Design Blades of A Wind Turbine Using Flexible Multibody ModellingDocument8 pagesDesign Blades of A Wind Turbine Using Flexible Multibody Modellingsrinath_iitmNo ratings yet
- 07 - Chapter 2Document17 pages07 - Chapter 2Libu GeorgebabuNo ratings yet
- 1 s2.0 S1568494621005676 MainDocument14 pages1 s2.0 S1568494621005676 MainRaul DiazNo ratings yet
- Design and Fabrication of Periodic Lattice-Based Cellular StructuresDocument13 pagesDesign and Fabrication of Periodic Lattice-Based Cellular StructuresYusuf YamanerNo ratings yet
- 33 67 1 RV PDFDocument13 pages33 67 1 RV PDFakanyilmazNo ratings yet
- Pages From Prototyping Architecture-2Document2 pagesPages From Prototyping Architecture-2allisonaxeNo ratings yet
- Simplified Micromechanics of Plain Weave Composites PDFDocument15 pagesSimplified Micromechanics of Plain Weave Composites PDFGani PateelNo ratings yet
- Ijetae 0812 46Document6 pagesIjetae 0812 46vishwajeet patilNo ratings yet
- Numerical Modelling of Ballistic Impact Response at Low Velocity in Aramid FabricsDocument15 pagesNumerical Modelling of Ballistic Impact Response at Low Velocity in Aramid FabricsGiovanniNo ratings yet
- Ijmet 09 04 083 PDFDocument9 pagesIjmet 09 04 083 PDF39SEAShashi KhatriNo ratings yet
- Sarvestani, 2017Document39 pagesSarvestani, 2017RafaelNo ratings yet
- Algorithmic Design of Origami Mechanisms and Tessellations - Andreas WalkerDocument8 pagesAlgorithmic Design of Origami Mechanisms and Tessellations - Andreas WalkerDimas AkbarNo ratings yet
- Free Floating Space Robot ArticlesDocument2 pagesFree Floating Space Robot ArticlesHaile SimachewNo ratings yet
- Simplified Micromechanics of Plain Weave CompositesDocument15 pagesSimplified Micromechanics of Plain Weave Compositess_padu3003@yahoo.comNo ratings yet
- Ijmet 09 04 083Document9 pagesIjmet 09 04 083Santosh RathodNo ratings yet
- A Machine Learning Approach To Determine The Elastic Properties of PrintedDocument9 pagesA Machine Learning Approach To Determine The Elastic Properties of PrintedsudhirNo ratings yet
- Failure and Prospects of Modification in A Belt Conveyor SystemDocument4 pagesFailure and Prospects of Modification in A Belt Conveyor SystemGogyNo ratings yet
- Optimization of Lattice Structures For Additive Manufacturing TechnologiesDocument10 pagesOptimization of Lattice Structures For Additive Manufacturing TechnologiesJavier Andres Munoz ChavesNo ratings yet
- Predictive Model For The Design of Zwitterionic Polymer Brushes: A Statistical Design of Experiments ApproachDocument9 pagesPredictive Model For The Design of Zwitterionic Polymer Brushes: A Statistical Design of Experiments ApproachrmykmrlvNo ratings yet
- 5 Izzuddin, DowlingDocument10 pages5 Izzuddin, Dowlingminhthanha6No ratings yet
- International Journal of Mechanical Sciences: M.R. Karamooz Ravari, M. Kadkhodaei, M. Badrossamay, R. RezaeiDocument8 pagesInternational Journal of Mechanical Sciences: M.R. Karamooz Ravari, M. Kadkhodaei, M. Badrossamay, R. RezaeiGunaseelanMurugesanNo ratings yet
- De Miguel 2017Document31 pagesDe Miguel 2017DinaNo ratings yet
- Electronics 12 02928Document23 pagesElectronics 12 02928kurts010No ratings yet
- Flexible Arm On ShaftDocument26 pagesFlexible Arm On ShaftCleves AxiomaNo ratings yet
- Doraemon - WikipediaDocument68 pagesDoraemon - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Super (2005 Film) - WikipediaDocument16 pagesSuper (2005 Film) - WikipediaOrigami toturial by AbhijeetNo ratings yet
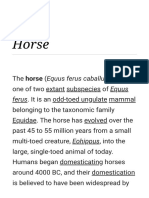
- Horse - WikipediaDocument173 pagesHorse - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Paper - WikipediaDocument59 pagesPaper - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Fruit - WikipediaDocument53 pagesFruit - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Electricity - WikipediaDocument114 pagesElectricity - WikipediaOrigami toturial by AbhijeetNo ratings yet
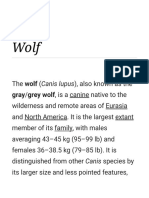
- Wolf - WikipediaDocument187 pagesWolf - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Satoshi Kamiya - WikipediaDocument6 pagesSatoshi Kamiya - WikipediaOrigami toturial by AbhijeetNo ratings yet
- Community Health NursingDocument2 pagesCommunity Health NursingAngelaBuenconsejoNo ratings yet
- Schachter and SingerDocument2 pagesSchachter and SingerCorinne PothinNo ratings yet
- Conference LaTeX Template 10 17 19Document4 pagesConference LaTeX Template 10 17 19Chaitali NarayaneNo ratings yet
- Assessment of Materials Management Practice On Public Building Construction ProjectDocument9 pagesAssessment of Materials Management Practice On Public Building Construction ProjectTesfahun LijalemNo ratings yet
- 10 Assess ValidationDocument9 pages10 Assess ValidationchemtabNo ratings yet
- Qualitative Research DesignDocument20 pagesQualitative Research DesignMildred OrtizNo ratings yet
- Las Mejores Prácticas de Inclusión en Educación BásicaDocument20 pagesLas Mejores Prácticas de Inclusión en Educación BásicasdanobeitiaNo ratings yet
- Cara Cara Buat Rujukan (Referencing)Document17 pagesCara Cara Buat Rujukan (Referencing)Hitsugaya TaichouNo ratings yet
- The Normal DistributionDocument5 pagesThe Normal Distributionjorsen93No ratings yet
- Index Crime and Non Index CrimeDocument18 pagesIndex Crime and Non Index CrimeJemwel CalindongNo ratings yet
- Indoor Stadium Issues and Options Paper 12 06 18 Final Draft Issued PDFDocument74 pagesIndoor Stadium Issues and Options Paper 12 06 18 Final Draft Issued PDFKristel Joyce MijaresNo ratings yet
- Chapter 1Document10 pagesChapter 1Ronalyn SamsonNo ratings yet
- Project: Building Dormitory For Foreign Students in Vietnam National University, Ha NoiDocument39 pagesProject: Building Dormitory For Foreign Students in Vietnam National University, Ha NoiNguyễn Hoàng TrườngNo ratings yet
- HHS Public AccessDocument23 pagesHHS Public AccessHarshoi KrishannaNo ratings yet
- Annex D: Carr-Hill Resource Allocation FormulaDocument6 pagesAnnex D: Carr-Hill Resource Allocation FormulaLeonardo NascimentoNo ratings yet
- Business Management and Behavioural Studies: Certificate in Accounting and Finance Stage ExaminationDocument4 pagesBusiness Management and Behavioural Studies: Certificate in Accounting and Finance Stage ExaminationJunaid MalikNo ratings yet
- Gender SensitizationDocument3 pagesGender SensitizationakttripathiNo ratings yet
- Research Methodology Techniques and Trends - 40Document307 pagesResearch Methodology Techniques and Trends - 40Wei LeeNo ratings yet
- Division of City Schools Division of Pasay Pasay City West High School Science Technology Engineering MathematicsDocument21 pagesDivision of City Schools Division of Pasay Pasay City West High School Science Technology Engineering MathematicsMa. Charlene Stephanie HilvanoNo ratings yet
- Jurnal EBM WBWMDocument10 pagesJurnal EBM WBWMUliza Nur AiniNo ratings yet
- Earlychildhood PDFDocument8 pagesEarlychildhood PDFkakayNo ratings yet
- UNIT 5 Data Analysis Teaching Notes: Historical Background and IntroductionDocument1 pageUNIT 5 Data Analysis Teaching Notes: Historical Background and Introductionmohd razif ibrahimNo ratings yet