You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Datacoms 5Document56 pagesDatacoms 5John Kevin DiciembreNo ratings yet
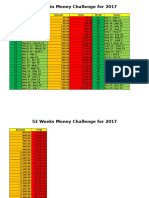
- 52 Week ChallengeDocument94 pages52 Week ChallengeJohn Kevin DiciembreNo ratings yet
- OJT - Internship Evaluation FormDocument3 pagesOJT - Internship Evaluation FormJohn Kevin DiciembreNo ratings yet
- Juan Dela Cruz: Address: Tel. No.: Email Address: Cellular No.Document2 pagesJuan Dela Cruz: Address: Tel. No.: Email Address: Cellular No.John Kevin DiciembreNo ratings yet
- Letter of Agreement (Template)Document2 pagesLetter of Agreement (Template)John Kevin DiciembreNo ratings yet
- Overtime Waiver: (On-the-Job Training / Practicum)Document1 pageOvertime Waiver: (On-the-Job Training / Practicum)John Kevin DiciembreNo ratings yet
- Voip, Msan and NGN: Submitted By: Diciembre, John Kevin Mamayog, Shamir Rosales, NickoDocument1 pageVoip, Msan and NGN: Submitted By: Diciembre, John Kevin Mamayog, Shamir Rosales, NickoJohn Kevin DiciembreNo ratings yet
- Solved Problems in Engineering DynamicsDocument7 pagesSolved Problems in Engineering DynamicsSharmaine AquinoNo ratings yet
- SdfeeDocument1 pageSdfeeJohn Kevin DiciembreNo ratings yet
- Laparoscopic CatalogDocument20 pagesLaparoscopic CatalogJohn Kevin DiciembreNo ratings yet
- Bluetooth Controlled Cardboard RobotDocument1 pageBluetooth Controlled Cardboard RobotJohn Kevin DiciembreNo ratings yet
- Project: Submission and Presentation Will Be On The 12 Week of This SemDocument9 pagesProject: Submission and Presentation Will Be On The 12 Week of This SemJohn Kevin DiciembreNo ratings yet
- Streetlights LogicDocument12 pagesStreetlights LogicJohn Kevin DiciembreNo ratings yet
- Vor Dme and NDB DraftDocument5 pagesVor Dme and NDB DraftJohn Kevin DiciembreNo ratings yet
- Automatic Street Light - v1Document2 pagesAutomatic Street Light - v1John Kevin DiciembreNo ratings yet
- Application of Gauss's Law: Symmetrical Distribution 1Document2 pagesApplication of Gauss's Law: Symmetrical Distribution 1John Kevin DiciembreNo ratings yet
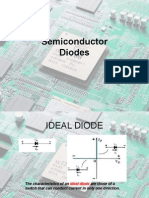
- SemiconductorDocument17 pagesSemiconductorJohn Kevin DiciembreNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Dire Dawa University Dire Dawa Institute of Technology: Department of Electrical and Computer Engineering (Control)Document60 pagesDire Dawa University Dire Dawa Institute of Technology: Department of Electrical and Computer Engineering (Control)abel henokNo ratings yet
- 06.2 - Clickshare CSE-200+ - Installation PDFDocument122 pages06.2 - Clickshare CSE-200+ - Installation PDFWilmer ProcontNo ratings yet
- ARIMA Modeling & Forecast in ExcelDocument2 pagesARIMA Modeling & Forecast in ExcelNumXL ProNo ratings yet
- Lucid Software Inc.: InvoiceDocument2 pagesLucid Software Inc.: InvoiceHenry M Gutièrrez SNo ratings yet
- 3D Screening CADDocument17 pages3D Screening CADAyu N KhafifahNo ratings yet
- 9A05406 Computer OrganizationDocument4 pages9A05406 Computer OrganizationsivabharathamurthyNo ratings yet
- PDF FormLetterDocument2 pagesPDF FormLetterAngel RamírezNo ratings yet
- Vacancies Kiambu County GovernmentDocument11 pagesVacancies Kiambu County GovernmentBrian MbathaNo ratings yet
- Gs01c25r01-01en 038Document25 pagesGs01c25r01-01en 038Estrutural EngenhariaNo ratings yet
- Workflow Scenario For PO Change - ABAP Development - SCN WikiDocument11 pagesWorkflow Scenario For PO Change - ABAP Development - SCN WikiAnup SatishNo ratings yet
- Wonder Ware Tech Note 576Document11 pagesWonder Ware Tech Note 576Anonymous 0CnvpxSNo ratings yet
- User Manual: Version 4.3 - June 2021Document146 pagesUser Manual: Version 4.3 - June 2021Arunkumar KNo ratings yet
- The Interface Envelope - Gaming, Technology, PowerDocument180 pagesThe Interface Envelope - Gaming, Technology, PowerManu KhannaNo ratings yet
- 5.5 - High Power Switching SystemsDocument16 pages5.5 - High Power Switching Systemsalaa delewarNo ratings yet
- Formatting and Navigation Macros: Action Keyboard Shortcut Mnemonic ExampleDocument3 pagesFormatting and Navigation Macros: Action Keyboard Shortcut Mnemonic ExampleHuzeifa ArifNo ratings yet
- ACTIVE Unemployment Benefits-AUG 2023 - LUCIFERDocument17 pagesACTIVE Unemployment Benefits-AUG 2023 - LUCIFERKate RollinsNo ratings yet
- Air Cooled Unit CapacityDocument14 pagesAir Cooled Unit CapacitySaodahSheikhHassanNo ratings yet
- Analysis of Ground Handling Characteristics of Innovative Aircraft ConfigurationsDocument176 pagesAnalysis of Ground Handling Characteristics of Innovative Aircraft ConfigurationsDennis Padec Bwochengo100% (1)
- stm32 Discovery SchematicDocument4 pagesstm32 Discovery SchematicAli BarakatNo ratings yet
- Parent EngagementDocument4 pagesParent Engagementapi-337553817No ratings yet
- Linux CommandsDocument6 pagesLinux CommandsAnonymous pIJpKeuYdNo ratings yet
- LexiConn Content ServicesDocument10 pagesLexiConn Content Serviceslexiconnin2No ratings yet
- Assembly x86 Exam1 SolutionDocument5 pagesAssembly x86 Exam1 Solutionkhayat_samirNo ratings yet
- Presentation For Sanchakriya Bits PilaniDocument19 pagesPresentation For Sanchakriya Bits PilaniNeelesh100% (1)
- Article BiophInt Assessing Shelf Life From Real Time and Accelerated Studies 2003Document7 pagesArticle BiophInt Assessing Shelf Life From Real Time and Accelerated Studies 2003Tom NuytsNo ratings yet
- Auditing TheoryDocument12 pagesAuditing TheorymilleranNo ratings yet
- PRO-E Sheet Metal DesignDocument21 pagesPRO-E Sheet Metal DesignvalarkarthiNo ratings yet
- Build Links That Boost Rankings PDFDocument69 pagesBuild Links That Boost Rankings PDFHgdty HgsNo ratings yet
- Compiler Design Lab Manual: Malla Reddy College of Engineering & TechnologyDocument49 pagesCompiler Design Lab Manual: Malla Reddy College of Engineering & TechnologyKR KrishnaNo ratings yet
- Mobile Application Development Mini Project Presentation: 18CSMP68 SMS Receiver AppDocument18 pagesMobile Application Development Mini Project Presentation: 18CSMP68 SMS Receiver AppswapnilNo ratings yet