You might also like
- 1000 Solved Problems in Fluid K Subram 20347920Document2 pages1000 Solved Problems in Fluid K Subram 20347920RhiscptreohLtusocan39% (23)
- SP PLM 1 9 X enDocument296 pagesSP PLM 1 9 X enDaniel LoncarNo ratings yet
- C3 Differentiation Topic AssessmentDocument6 pagesC3 Differentiation Topic AssessmentFaddy OrahaNo ratings yet
- Icje 4 3 29 34Document6 pagesIcje 4 3 29 34Akira MiyazonoNo ratings yet
- Cartesian Coordinates Waveguide ModesDocument63 pagesCartesian Coordinates Waveguide ModesSindhujaSindhuNo ratings yet
- Arfken Mathematical Methods 7e: Section 9.2 - Exercise 9.2.4 SolutionDocument1 pageArfken Mathematical Methods 7e: Section 9.2 - Exercise 9.2.4 SolutionAlcides LucasNo ratings yet
- 5.0 Formulas MatematicasDocument3 pages5.0 Formulas MatematicasANo ratings yet
- Double Integral Lecture: Calculating Areas and IntegralsDocument5 pagesDouble Integral Lecture: Calculating Areas and IntegralsxzNo ratings yet
- 7B Areas Under Curves PDFDocument35 pages7B Areas Under Curves PDFvikranth chittimallaNo ratings yet
- Computational Fluid Dynamics Course: Grid GenerationDocument19 pagesComputational Fluid Dynamics Course: Grid GenerationVishu BhattNo ratings yet
- ArfkenMMch9s2e1Document1 pageArfkenMMch9s2e1aleenanoorniaziNo ratings yet
- Chapter 07Document66 pagesChapter 07LuisellysNo ratings yet
- Unit 2 NOTESDocument34 pagesUnit 2 NOTES2K20MC69 Kartik GuptaNo ratings yet
- Y GT2 A Lec 03 Double Int 1415Document14 pagesY GT2 A Lec 03 Double Int 1415Bell PhamNo ratings yet
- Calculus Test12 Sol 20191015Document7 pagesCalculus Test12 Sol 20191015Mạc Hải LongNo ratings yet
- MAT2322 Notes SummaryDocument63 pagesMAT2322 Notes SummarySahilGargNo ratings yet
- Ace Ahead Mathematics T Volume 2: Exam Practice 1Document10 pagesAce Ahead Mathematics T Volume 2: Exam Practice 1ck_shuNo ratings yet
- Further Mathematics p2 With Recalls ReviewedDocument16 pagesFurther Mathematics p2 With Recalls ReviewedKeng ElsonNo ratings yet
- Trapezoidal RuleDocument2 pagesTrapezoidal RuleMaajith MarzookNo ratings yet
- Lecture16 PDFDocument10 pagesLecture16 PDFNindiya Mayuda PutriNo ratings yet
- I e e e e e e e e e e e e E: Solution Class-12Th - Mathematics - Sample Paper - 1 Class 12 - MathematicsDocument6 pagesI e e e e e e e e e e e e E: Solution Class-12Th - Mathematics - Sample Paper - 1 Class 12 - MathematicsMUSKAN YADAVNo ratings yet
- Supp Math ReferenceDocument10 pagesSupp Math ReferenceAfzaalNo ratings yet
- C 06 Anti DifferentiationDocument31 pagesC 06 Anti Differentiationebrahimipour1360No ratings yet
- MATH115 Sample Long Quiz 4 Answers 08 July 2015Document2 pagesMATH115 Sample Long Quiz 4 Answers 08 July 2015MEOW41No ratings yet
- MATHEMATICS SOLUTIONS OF ADVANCED LEVEL PROBLEMSDocument17 pagesMATHEMATICS SOLUTIONS OF ADVANCED LEVEL PROBLEMSvejoshi21699No ratings yet
- MATHEMATICS SOLUTIONS OF ADVANCED LEVEL PROBLEMSDocument17 pagesMATHEMATICS SOLUTIONS OF ADVANCED LEVEL PROBLEMSHimanshu GuptaNo ratings yet
- 3-Graph 0Document7 pages3-Graph 0CSP EDUNo ratings yet
- 文二181117参考答案Document1 page文二181117参考答案Renfei GaoNo ratings yet
- QR Formula Sheet PDFDocument3 pagesQR Formula Sheet PDFRebecca TsaiNo ratings yet
- SM15 June 12 CH 6Document11 pagesSM15 June 12 CH 6lmbrn0415No ratings yet
- Partial DerivativesDocument2 pagesPartial Derivativesmark dave villasencioNo ratings yet
- Partial DerivativesDocument2 pagesPartial DerivativesCC CristianNo ratings yet
- 2008 ACJC MA H2 P1 Prelim SolnDocument10 pages2008 ACJC MA H2 P1 Prelim SolnAmbrieshKarthikNo ratings yet
- Chapter 5. Two-Dimensional Finite Elements: Plane Stress (Thin Members) Out-Of-Plane Normal and Shear Stress Are Zero X yDocument16 pagesChapter 5. Two-Dimensional Finite Elements: Plane Stress (Thin Members) Out-Of-Plane Normal and Shear Stress Are Zero X ysakeriraq81No ratings yet
- Gaussian Quadrature and Change of IntervalDocument5 pagesGaussian Quadrature and Change of Intervalsandhiya sunainaNo ratings yet
- JC1 EOY Solutions (For Students)Document23 pagesJC1 EOY Solutions (For Students)BooNo ratings yet
- Midterm 1Document11 pagesMidterm 1JUNIOR RAID YEBARA GUTIERREZNo ratings yet
- Ch917 Review SolsDocument6 pagesCh917 Review SolsAnonymous D1mQfaOsINo ratings yet
- 21A Sample Final Solutions PDFDocument5 pages21A Sample Final Solutions PDFant314159No ratings yet
- Análise Matemática II Exame ResoluçãoDocument6 pagesAnálise Matemática II Exame ResoluçãoJorge Dinis ManhepeNo ratings yet
- Quantum Mechanics Exam SolutionsDocument3 pagesQuantum Mechanics Exam SolutionsKarishtain NewtonNo ratings yet
- Assignment 3 Solutions: Laplacian, Line Integrals, and Curvilinear CoordinatesDocument7 pagesAssignment 3 Solutions: Laplacian, Line Integrals, and Curvilinear CoordinatesRohan NaiduNo ratings yet
- MATH1210 Test1 SolutionsDocument5 pagesMATH1210 Test1 Solutionssukhdeepsukhdeep2903No ratings yet
- MspacesDocument29 pagesMspacesNitish KumarNo ratings yet
- MATH1500 Notes PDFDocument7 pagesMATH1500 Notes PDFruiyu liuNo ratings yet
- MATHEMATICS FORMULA GUIDEDocument14 pagesMATHEMATICS FORMULA GUIDEtesterNo ratings yet
- 14 Surf 2Document39 pages14 Surf 2manojaNo ratings yet
- Tut 12 DE - SolnDocument7 pagesTut 12 DE - SolnselmerparisNo ratings yet
- MATH Assignment 1 Part BDocument9 pagesMATH Assignment 1 Part Batikah potterNo ratings yet
- MATH Assignment 1 Part BDocument9 pagesMATH Assignment 1 Part Batikah potterNo ratings yet
- Homework 1 Gradient, Divergence and LaplacianDocument6 pagesHomework 1 Gradient, Divergence and LaplacianEntendiendo La FísicaNo ratings yet
- Shw7 259Document3 pagesShw7 259MotseilekgoaNo ratings yet
- Finite Element Method For Civil EngineersDocument55 pagesFinite Element Method For Civil EngineersBaljinnyam TsevegjavNo ratings yet
- 110.302 Differential Equations Professor Richard BrownDocument2 pages110.302 Differential Equations Professor Richard BrownLuis BaldassariNo ratings yet
- Module 1 - DeQDocument3 pagesModule 1 - DeQTest QuizNo ratings yet
- DerivativesDocument49 pagesDerivativesCarlaNo ratings yet
- Pete 455 08 StabilityDocument77 pagesPete 455 08 StabilityStanley OkaforNo ratings yet
- Transient Response of 1st and 2nd Order SystemsDocument174 pagesTransient Response of 1st and 2nd Order Systemssafeer_siddickyNo ratings yet
- PH108 - Electricity and Magnetism: Basanta K. NandiDocument21 pagesPH108 - Electricity and Magnetism: Basanta K. Nandiamar BaroniaNo ratings yet
- Metric SpacesDocument102 pagesMetric Spacestomdavis777No ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Oxygen 1Document61 pagesOxygen 1Vignesh DuraiNo ratings yet
- Differential Equations Study GuideDocument2 pagesDifferential Equations Study GuideyousifabrNo ratings yet
- Derivation CompleteDocument47 pagesDerivation CompleteVignesh DuraiNo ratings yet
- Quantitative AptitudeDocument2 pagesQuantitative AptitudeSivakumar MNo ratings yet
- Integral TableDocument14 pagesIntegral TablesparkshockNo ratings yet
- CamScanner App Scans Multiple PagesDocument3 pagesCamScanner App Scans Multiple PagesVignesh DuraiNo ratings yet
- Engine lubrication principles and cooling methodsDocument50 pagesEngine lubrication principles and cooling methodsVignesh DuraiNo ratings yet
- AE Engineering Mathematics, Aerodynamics, Structures & PropulsionDocument3 pagesAE Engineering Mathematics, Aerodynamics, Structures & PropulsionvenkatNo ratings yet
- FM Sol Chap01-001Document9 pagesFM Sol Chap01-001HarunSevinçNo ratings yet
- Rockets & Missiles-QBDocument6 pagesRockets & Missiles-QBVignesh DuraiNo ratings yet
- GATE - 2016 (Aerospace Engineering) Quantitative AptitudeDocument13 pagesGATE - 2016 (Aerospace Engineering) Quantitative AptitudegeniNo ratings yet
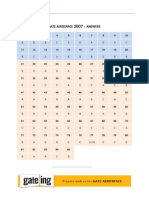
- GATE Aerospace 2007 AnswersDocument1 pageGATE Aerospace 2007 Answersakashsinha_2004No ratings yet
- Rocketry HistoryDocument37 pagesRocketry HistoryarravindNo ratings yet
- Computational Fluid Dynamics Two Marks Question and AnswerDocument24 pagesComputational Fluid Dynamics Two Marks Question and AnswerLee Shi HongNo ratings yet
- Turb ModelDocument20 pagesTurb ModelVignesh DuraiNo ratings yet
- CFD Methods and ApplicationsDocument7 pagesCFD Methods and ApplicationsVignesh DuraiNo ratings yet
- Grid GenerationDocument26 pagesGrid GenerationVignesh DuraiNo ratings yet
- Turb ModelDocument20 pagesTurb ModelVignesh DuraiNo ratings yet
- New Doc 15Document68 pagesNew Doc 15Vignesh DuraiNo ratings yet
- 10-Rans Present PDFDocument38 pages10-Rans Present PDFVignesh DuraiNo ratings yet
- Quantitative AptitudeDocument2 pagesQuantitative AptitudeSivakumar MNo ratings yet
- Basics of Mesh Generation - SF Anwer PDFDocument63 pagesBasics of Mesh Generation - SF Anwer PDFVignesh DuraiNo ratings yet
- Thinkvidya Learning PVT LTD Started But No More Aero Modelling Workshops, Online Tuition Service Are OrganisedDocument1 pageThinkvidya Learning PVT LTD Started But No More Aero Modelling Workshops, Online Tuition Service Are OrganisedVignesh DuraiNo ratings yet
- GATE Aerospace AE SyllabusDocument3 pagesGATE Aerospace AE SyllabusSrinivas RaghavanNo ratings yet
- Jyoti Sank ArthesisDocument55 pagesJyoti Sank ArthesisVignesh DuraiNo ratings yet
- GliderDocument31 pagesGlideranand_316764947No ratings yet
- SEO Optimized Title for StartLoft Curve Data Less than 40 CharactersDocument3 pagesSEO Optimized Title for StartLoft Curve Data Less than 40 CharactersVignesh DuraiNo ratings yet
- Hfssdesign1: Design SummaryDocument3 pagesHfssdesign1: Design SummaryVignesh DuraiNo ratings yet
- Module 3 - Basic Administration - NETAPPDocument13 pagesModule 3 - Basic Administration - NETAPPGubudaBudaNo ratings yet
- Ex250 SDL1 X142 - Ex9 Oet1 X9Document68 pagesEx250 SDL1 X142 - Ex9 Oet1 X9BocefaloNo ratings yet
- SW Engg MCQDocument88 pagesSW Engg MCQMohit Saini100% (1)
- Alphaview User GuideDocument10 pagesAlphaview User GuideMichael CaverlyNo ratings yet
- P2P 24777846Document20 pagesP2P 24777846Elicia OñateNo ratings yet
- How Can I Add A Printer From The Command Line - Management & Mobility Content From Windows IT ProDocument2 pagesHow Can I Add A Printer From The Command Line - Management & Mobility Content From Windows IT ProLuisMarioBragaNo ratings yet
- Azenqos Installation Guide For Oneplus 5TDocument2 pagesAzenqos Installation Guide For Oneplus 5TUTIPLNo ratings yet
- Biometric ATM Security with Fingerprint AuthenticationDocument5 pagesBiometric ATM Security with Fingerprint AuthenticationsaRAth asgaRdianNo ratings yet
- Huawei OLT MA5680T/MA5683T Super Control Unit Board H801SCUH Hardware DescriptionDocument7 pagesHuawei OLT MA5680T/MA5683T Super Control Unit Board H801SCUH Hardware DescriptionHuawei GPON NetworksNo ratings yet
- Siva Prakash A/L Gunaseelan No 23 Jalan Seri Mersing 37 Kawasan 2 Taman Seri Andalas, 41200, KLANG, SELDocument2 pagesSiva Prakash A/L Gunaseelan No 23 Jalan Seri Mersing 37 Kawasan 2 Taman Seri Andalas, 41200, KLANG, SELJaya PrathapNo ratings yet
- VHDL Introduction by J BhaskerDocument4 pagesVHDL Introduction by J BhaskerVishi Agrawal0% (1)
- Venn DiagramDocument7 pagesVenn DiagramSantosh N. PatilNo ratings yet
- Mohaa Guide (Black Edition)Document126 pagesMohaa Guide (Black Edition)manue81No ratings yet
- r05320503 Unix ProgrammingDocument4 pagesr05320503 Unix ProgrammingSRINIVASA RAO GANTA0% (1)
- Indicator Report Dec 11Document174 pagesIndicator Report Dec 11Guillaume DarauxNo ratings yet
- Note C Lec1 - FixDocument25 pagesNote C Lec1 - FixRahmat Faddli SiregarNo ratings yet
- Project 2000 Training ManualDocument431 pagesProject 2000 Training Manualnick.blijlevens9195100% (3)
- Public Sec Schools QuirinoDocument5 pagesPublic Sec Schools QuirinoArnel PabloNo ratings yet
- Halsey Herms ResumeDocument1 pageHalsey Herms ResumeHalseyNo ratings yet
- NC, CNC and DNC Machine Tools ExplainedDocument38 pagesNC, CNC and DNC Machine Tools ExplainedSintu KumarNo ratings yet
- Stan ModDocument32 pagesStan ModMarcelino Vargas QueaNo ratings yet
- DataEase Quick Reports GuideDocument40 pagesDataEase Quick Reports Guidecarlos_saNo ratings yet
- Understanding Local Maxima, Minima and Inflection PointsDocument2 pagesUnderstanding Local Maxima, Minima and Inflection PointsAshik SharonNo ratings yet
- FI_METHODSDocument12 pagesFI_METHODSSergio LopezNo ratings yet
- MSI AM1I 7865 001R Bedienungsanleitung 430cf0Document18 pagesMSI AM1I 7865 001R Bedienungsanleitung 430cf0dhanysiregarNo ratings yet
- Vikas StatementDocument1 pageVikas StatementAbhishek PareekNo ratings yet
- Test of QTDocument5 pagesTest of QTMelissa JonesNo ratings yet