You might also like
- 737 800BCF PDFDocument15 pages737 800BCF PDFSantiago Herrera Palacio0% (2)
- Ansys Fluid Dynamics Verification ManualDocument226 pagesAnsys Fluid Dynamics Verification ManualVinay Kusumanchi100% (2)
- Tugas 1 Karakterisasi Material Rizki Ari Utama 21050117120048Document5 pagesTugas 1 Karakterisasi Material Rizki Ari Utama 21050117120048Rizki AriNo ratings yet
- PipeSim ESPDocument24 pagesPipeSim ESPGery SiregarNo ratings yet
- Motor TechNotes Direct Coupled-AlignmentDocument2 pagesMotor TechNotes Direct Coupled-AlignmentramoebpNo ratings yet
- BH410,600mm, 12.0m-Vertical 2Document1 pageBH410,600mm, 12.0m-Vertical 2Mohamed AskarNo ratings yet
- MassdiagramDocument16 pagesMassdiagramNabanita ChakravartyNo ratings yet
- Presentación2 Los Angeles 11NCEE FDocument2 pagesPresentación2 Los Angeles 11NCEE FMarkito SantosNo ratings yet
- Prokon Column OutputDocument6 pagesProkon Column Outputsoly2k12No ratings yet
- And RADIAL LOAD Applied Mid-Way Along Shaft Extension: MPM-B2153F-MJ74AA 10000073869Document5 pagesAnd RADIAL LOAD Applied Mid-Way Along Shaft Extension: MPM-B2153F-MJ74AA 10000073869Julian Gabriel PerezNo ratings yet
- Steel Beam CheckDocument1 pageSteel Beam CheckKah PengNo ratings yet
- 1-1/4" Diameter Cable: M40 SeriesDocument3 pages1-1/4" Diameter Cable: M40 SeriesTVP_contechNo ratings yet
- Effect of Web Reinforcement in FRP-Reinforced Deep BeamsDocument26 pagesEffect of Web Reinforcement in FRP-Reinforced Deep BeamsKhNo ratings yet
- 05-Prof Harry-Jacked-in Piles - The Way I See It (Prof Harry's Perspective On What Makes It Work)Document43 pages05-Prof Harry-Jacked-in Piles - The Way I See It (Prof Harry's Perspective On What Makes It Work)freezefreezeNo ratings yet
- Composite Steel Beam: - NoneDocument2 pagesComposite Steel Beam: - NoneJorgeCancio-BelloNo ratings yet
- Lab 4 - 332LDocument5 pagesLab 4 - 332LAsem HalawaniNo ratings yet
- Modulus of Resilience: 248 C H A P T E R 6 Mechanical Properties of Metals IDocument1 pageModulus of Resilience: 248 C H A P T E R 6 Mechanical Properties of Metals IMattia MatrangaNo ratings yet
- 2015 09 ROV Test Pool WebDocument2 pages2015 09 ROV Test Pool WebŞef Utas AwijNo ratings yet
- Solucionario Mecanica AnaliticaDocument4 pagesSolucionario Mecanica AnaliticaLeonel ArchilaNo ratings yet
- ACI Column PM Intax Diagram BOUNDARY ELEMENT - 2Document1 pageACI Column PM Intax Diagram BOUNDARY ELEMENT - 2dleechuyNo ratings yet
- Live Load RDDocument1 pageLive Load RDMark JangadNo ratings yet
- Bearing LoadDocument1 pageBearing LoadEdan EdanNo ratings yet
- Clamping Units: Kennametal Km4X™Document2 pagesClamping Units: Kennametal Km4X™g1763970No ratings yet
- Column A-5 & E-5Document5 pagesColumn A-5 & E-5Vladimir BlanchardNo ratings yet
- Column Design Under Combined Axial Compression and Biaxial Bending MomentsDocument2 pagesColumn Design Under Combined Axial Compression and Biaxial Bending MomentsAndro RebuyasNo ratings yet
- Workshop 5 - Multicollinearity and Functional FormDocument77 pagesWorkshop 5 - Multicollinearity and Functional FormDoan Anh TuanNo ratings yet
- SkyCiv Beam - SkyCiv Platform11Document1 pageSkyCiv Beam - SkyCiv Platform11Ammar NaseerNo ratings yet
- EM Manual Wall Design - 05Document3 pagesEM Manual Wall Design - 05Manoj JaiswalNo ratings yet
- Column A-1 THRU A-4Document5 pagesColumn A-1 THRU A-4Vladimir BlanchardNo ratings yet
- IASS2018 FullPaper 31Document4 pagesIASS2018 FullPaper 31Marina BorgesNo ratings yet
- Sodick AG80-200L Eng 2019Document4 pagesSodick AG80-200L Eng 2019Sergey VolkovNo ratings yet
- Monorail Structural AnalysisDocument5 pagesMonorail Structural AnalysisSherwin PonsNo ratings yet
- Qm2 Bearing Wall ReportDocument5 pagesQm2 Bearing Wall Report4geniecivilNo ratings yet
- Column CFR PDocument15 pagesColumn CFR PLenielle AmatosaNo ratings yet
- Steel BridgeDocument4 pagesSteel Bridgenadher albaghdadiNo ratings yet
- LFWP Training R1Document27 pagesLFWP Training R1lemuel bacsaNo ratings yet
- Column CFRPDocument15 pagesColumn CFRPLenielle AmatosaNo ratings yet
- Column CFRP11Document15 pagesColumn CFRP11Lenielle AmatosaNo ratings yet
- Sect-5 Measuring & ReportingDocument12 pagesSect-5 Measuring & Reportingbr_fdm1604No ratings yet
- Ultraslim Wheel Load Scale: ThirdDocument1 pageUltraslim Wheel Load Scale: ThirdAziz BasyariNo ratings yet
- Beam Project ChangesDocument12 pagesBeam Project Changesyoshdog@gmail.comNo ratings yet
- Calculation Sheet For Placing Boom Fixation in CoresDocument11 pagesCalculation Sheet For Placing Boom Fixation in CoresMohamed SaiedNo ratings yet
- TestDocument2 pagesTestFabrizio RossiNo ratings yet
- Haris 2Document1 pageHaris 2Abdul HameedNo ratings yet
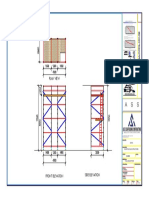
- HARIS Led HOLDING STRUCTURE-ModelDocument1 pageHARIS Led HOLDING STRUCTURE-ModelAbdul HameedNo ratings yet
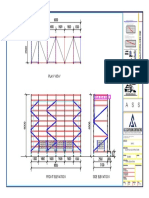
- 1 ARENA ANALYST PLTFORM-ModelDocument1 page1 ARENA ANALYST PLTFORM-ModelAbdul HameedNo ratings yet
- Current in Multiple of In: Cutler-Hammer Type KWC Molded-Case Circuit BreakerDocument1 pageCurrent in Multiple of In: Cutler-Hammer Type KWC Molded-Case Circuit Breakerbaskaranjay5502No ratings yet
- Ult Cap FondDocument1 pageUlt Cap FondAW EfendiNo ratings yet
- WG-4 SerenaDocument11 pagesWG-4 Serenamoaziz.eseNo ratings yet
- Afica Diseño de Pantalla - EST - JHON - OROPEZADocument5 pagesAfica Diseño de Pantalla - EST - JHON - OROPEZAJAIRO ALBERTO RANGEL VERANo ratings yet
- Concrete ColumnDocument3 pagesConcrete ColumnDaniella AlvesNo ratings yet
- Col C1Document10 pagesCol C1layaljamal2No ratings yet
- FPS Rig Tool Workshop ExamplesDocument7 pagesFPS Rig Tool Workshop Examplesabusani0139No ratings yet
- Presentation From August 2000 Dinner MeetingDocument21 pagesPresentation From August 2000 Dinner MeetingincosewmaNo ratings yet
- 1-L Shaped LED SCAFFOLD - Copy-ModelDocument1 page1-L Shaped LED SCAFFOLD - Copy-ModelAbdul HameedNo ratings yet
- Current in Multiple of In: Cutler-Hammer Type KW/HKW Molded-Case Circuit BreakerDocument1 pageCurrent in Multiple of In: Cutler-Hammer Type KW/HKW Molded-Case Circuit Breakerbaskaranjay5502No ratings yet
- Trakaletal.2013 Model-4Document4 pagesTrakaletal.2013 Model-4fa fabmNo ratings yet
- And Versatile: Strong, CompactDocument2 pagesAnd Versatile: Strong, Compactperop123No ratings yet
- KN KN: GDT Pile: P107-1 1500 Blow: 1 (Test: 09-May-2021 09:16:) 14-May-2021 K-Geo Solutions Co., Ltd. CAPWAP (R) 2014-3Document12 pagesKN KN: GDT Pile: P107-1 1500 Blow: 1 (Test: 09-May-2021 09:16:) 14-May-2021 K-Geo Solutions Co., Ltd. CAPWAP (R) 2014-3Sothoan Pro ÐGNo ratings yet
- 2016-01-13 PBSD Expert Panel WS 5bDocument39 pages2016-01-13 PBSD Expert Panel WS 5bMarco ReyesNo ratings yet
- References - 1975 - Pure and Applied Mathematics PDFDocument4 pagesReferences - 1975 - Pure and Applied Mathematics PDFÓscarNo ratings yet
- TFG ParachoquesDocument120 pagesTFG ParachoquesÓscarNo ratings yet
- 03a Algind DT Rules Eng PDFDocument78 pages03a Algind DT Rules Eng PDFÓscarNo ratings yet
- Multidisciplinary Shape Optimization of Stratospheric AirshipsDocument12 pagesMultidisciplinary Shape Optimization of Stratospheric AirshipsÓscarNo ratings yet
- TFG ParachoquesDocument120 pagesTFG ParachoquesÓscarNo ratings yet
- ARAI Coast Down Testing PDFDocument11 pagesARAI Coast Down Testing PDFVenkata NarayanaNo ratings yet
- Reliable Blocked Flue Wall Detection For EnhancedDocument4 pagesReliable Blocked Flue Wall Detection For EnhancedDebashis DashNo ratings yet
- Real-Time Advanced Warning of Screenouts With The Inverse Slope MethodDocument9 pagesReal-Time Advanced Warning of Screenouts With The Inverse Slope MethodSkolastikaPradiptaNo ratings yet
- Injection Pump Specification ©Document4 pagesInjection Pump Specification ©murillo_rodriguez8382No ratings yet
- Practice Problems On Energy and ThermochemistryDocument6 pagesPractice Problems On Energy and ThermochemistryMichael MangaoangNo ratings yet
- Me2204 Unit Wise QuestionsDocument18 pagesMe2204 Unit Wise QuestionsMohanraj Subramani0% (1)
- Experiment 2a: Measuring Forces On Submerged Surfaces PurposesDocument3 pagesExperiment 2a: Measuring Forces On Submerged Surfaces PurposesAdrian MackNo ratings yet
- 6D114-3 Seccion20 STD Value A4Document41 pages6D114-3 Seccion20 STD Value A4Wr Sb100% (1)
- Physics Worksheet Archimedes Principle and PressureDocument3 pagesPhysics Worksheet Archimedes Principle and PressuretuvvacNo ratings yet
- Yuken Pressure Control ValvesDocument5 pagesYuken Pressure Control ValvesDANIEL LNo ratings yet
- Hose Technic DataDocument28 pagesHose Technic Dataerol_ay98No ratings yet
- Spe 97099 MS P PDFDocument20 pagesSpe 97099 MS P PDFCarlos Alberto Mora100% (1)
- Ressure Emperature Hart: R12 R134 SP34E R409A R22 R410A R419A R407C R502 R404A R408A R507Document1 pageRessure Emperature Hart: R12 R134 SP34E R409A R22 R410A R419A R407C R502 R404A R408A R507Kumar sssssNo ratings yet
- Chicken Nuggets FryingDocument10 pagesChicken Nuggets FryingAmaameliahNo ratings yet
- Negative Facts ExercisesDocument10 pagesNegative Facts Exercisesryse346335No ratings yet
- DAV CAE CLASS XI Syllabus 2021-2022Document30 pagesDAV CAE CLASS XI Syllabus 2021-2022Prabhat Kumar MishraNo ratings yet
- Thermo - Hydrulic Turbine - Dimensional AnlysisDocument17 pagesThermo - Hydrulic Turbine - Dimensional AnlysisbachayadavNo ratings yet
- Guide Lines On Compaction Equipment For Road Worksw - IRC-SP.97.2013Document56 pagesGuide Lines On Compaction Equipment For Road Worksw - IRC-SP.97.2013Varma Datla67% (3)
- Annulus Communications Eliminated Using Pressure-Activated Sealant April 2005Document12 pagesAnnulus Communications Eliminated Using Pressure-Activated Sealant April 2005fudvariNo ratings yet
- Pnematics & Compressed Air Optimization PDFDocument103 pagesPnematics & Compressed Air Optimization PDFsharmasourabhNo ratings yet
- LNG Gasification Equipment - Furui CitDocument12 pagesLNG Gasification Equipment - Furui CitBac Ho VanNo ratings yet
- A. B. C. D.: Answer: ExplanationDocument22 pagesA. B. C. D.: Answer: ExplanationHAFIZ IMRAN AKHTERNo ratings yet
- Aire para InstrumentosDocument5 pagesAire para InstrumentosMagin Idelfonso TorreblancaNo ratings yet
- Schaum Physical ChemistryDocument513 pagesSchaum Physical ChemistryRishabh Kumar100% (1)
- Compressor: Process Data SheetDocument2 pagesCompressor: Process Data SheetEddie TaiNo ratings yet
- Aftercooler - Test: Testing and AdjustingDocument6 pagesAftercooler - Test: Testing and AdjustingAbdoulaye Boua BERTHENo ratings yet
- Homework 10 Fluids SolutionsDocument8 pagesHomework 10 Fluids SolutionsHa ViNo ratings yet
- 973 Sf6 ManualDocument34 pages973 Sf6 ManualAriel Martinez N100% (1)