You might also like
- Report Photo of CompleteprojectDocument26 pagesReport Photo of CompleteprojectFuture TechnovationNo ratings yet
- Automatic Page TurnerDocument2 pagesAutomatic Page TurnerFuture TechnovationNo ratings yet
- Arm Mini: Quick Start ManualDocument37 pagesArm Mini: Quick Start ManualFuture TechnovationNo ratings yet
- Automatic Power Factor CorrectionDocument29 pagesAutomatic Power Factor CorrectionFuture TechnovationNo ratings yet
- Wireless Camera SpecificationDocument1 pageWireless Camera SpecificationFuture TechnovationNo ratings yet
- Maze Solving Vehicle PDFDocument92 pagesMaze Solving Vehicle PDFFuture TechnovationNo ratings yet
- Design and Construction of Load Sharing Control System Using PIC MicrocontrollerDocument10 pagesDesign and Construction of Load Sharing Control System Using PIC MicrocontrollerFuture Technovation75% (4)
- 4x20 LCDDocument17 pages4x20 LCDFuture TechnovationNo ratings yet
- PWM Using Atmega328Document1 pagePWM Using Atmega328Future TechnovationNo ratings yet
- 3phase Induction MotorDocument74 pages3phase Induction MotorFuture TechnovationNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- 2K23 - RK - Rep - Design of A WSN Node For Forest Trees Against PoachingDocument61 pages2K23 - RK - Rep - Design of A WSN Node For Forest Trees Against PoachingDeepu ShellgiNo ratings yet
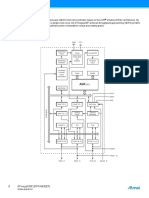
- Figure 2-1. Block DiagramDocument1 pageFigure 2-1. Block DiagramsalarNo ratings yet
- Arduino UNO R3Document4 pagesArduino UNO R3Engr NaumanNo ratings yet
- Control of Two Robotic Platforms Using Multi-Agent SystemsDocument20 pagesControl of Two Robotic Platforms Using Multi-Agent SystemsJaime Andres Rincon Arango100% (1)
- IOT Based Health Monitoring SystemDocument3 pagesIOT Based Health Monitoring SystemInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- ArduinoDocument28 pagesArduinoD I Y ANo ratings yet
- Automated Attendance Based On Facial Recognition Using Matlab and ArduinoDocument69 pagesAutomated Attendance Based On Facial Recognition Using Matlab and ArduinoGhana Kiran100% (1)
- Garbage Monitoring SystemDocument27 pagesGarbage Monitoring SystemPrince GNo ratings yet
- Embedded Systems: Engr. Rashid Farid ChishtiDocument46 pagesEmbedded Systems: Engr. Rashid Farid Chishtiaamir masoodNo ratings yet
- Soil Moisture Sensor: Technical SpecificationsDocument4 pagesSoil Moisture Sensor: Technical SpecificationsNadzri YahayaNo ratings yet
- Modified Radar ReportDocument17 pagesModified Radar ReportAsif KarimNo ratings yet
- Arduino and Raspberry Pi Best Informative Projects For Future EnhancementDocument223 pagesArduino and Raspberry Pi Best Informative Projects For Future EnhancementJorge Jockyman Junior100% (1)
- DC Motor Control System Through Android ApplicatioDocument4 pagesDC Motor Control System Through Android ApplicatioDeepak ReddyNo ratings yet
- Angle of Attack Sensor Based On Arduino UNO MicrocontrollerDocument4 pagesAngle of Attack Sensor Based On Arduino UNO MicrocontrollerNaji YakzanNo ratings yet
- Internet of Things (Iot)Document54 pagesInternet of Things (Iot)nitinsomanathanNo ratings yet
- Double Cross Antenna For NOAA / METEOR Weather Satellite: 137 MHZDocument22 pagesDouble Cross Antenna For NOAA / METEOR Weather Satellite: 137 MHZBrian BeegeeNo ratings yet
- Arduino UNODocument1 pageArduino UNOHiru SegwayNo ratings yet
- 1.1 Heart Rate MeasurementDocument27 pages1.1 Heart Rate MeasurementIndupriya selvamNo ratings yet
- Cs3691 Embedded and Iot Lab ManualDocument123 pagesCs3691 Embedded and Iot Lab Manual21csa48No ratings yet
- Arduino Nano Datasheet 2Document5 pagesArduino Nano Datasheet 2Samrul YoNo ratings yet
- Arduino Based RADAR SystemDocument33 pagesArduino Based RADAR SystemKamalJeet Singh100% (5)
- DVR & Dr. HS MIC College of Technology 1: Arduino Based Smart LPG Gas Leakage Detector SystemDocument83 pagesDVR & Dr. HS MIC College of Technology 1: Arduino Based Smart LPG Gas Leakage Detector SystemSanju StarcNo ratings yet
- Automatic Check. PostDocument2 pagesAutomatic Check. PostRudresh RakeshNo ratings yet
- DIY Obstacle Avoiding RobotDocument42 pagesDIY Obstacle Avoiding RobotHarsha SamagaraNo ratings yet
- Arduino Micro Controller Processing For Everyone Part 1Document114 pagesArduino Micro Controller Processing For Everyone Part 1fashazee6750100% (1)
- 12.2.2 EIMSK - External Interrupt Mask RegisterDocument1 page12.2.2 EIMSK - External Interrupt Mask RegisternamerNo ratings yet
- Hummer-Bot-4.0 Instruction Manual V.1.5Document116 pagesHummer-Bot-4.0 Instruction Manual V.1.5Yogi Sasongko83% (6)
- Reference Seminar ReportDocument28 pagesReference Seminar Reporta k0% (1)
- ArduinoDocument22 pagesArduinosugadev74No ratings yet
- Design Engineering: Intelligent Traffic Control System For Congestion Control, Emergency Vehicle Clearance and StolenDocument8 pagesDesign Engineering: Intelligent Traffic Control System For Congestion Control, Emergency Vehicle Clearance and Stolenharsha RNo ratings yet