You might also like
- Raspberry Pi GPIO PracticeDocument68 pagesRaspberry Pi GPIO Practicedjrao81No ratings yet
- Diagrmadluz 011615Document1 pageDiagrmadluz 011615220543No ratings yet
- Guide To Writing Your Project Manuscript PDFDocument7 pagesGuide To Writing Your Project Manuscript PDFAlbert AlemaniaNo ratings yet
- Micro_project_Report_format[1]Document4 pagesMicro_project_Report_format[1]salikrishna405No ratings yet
- NSRIT College Automatic Sanitizer ProjectDocument3 pagesNSRIT College Automatic Sanitizer ProjectIsmail Rohit RebalNo ratings yet
- Wka CD, H Yd Ine - S WMDX.: 11 Jeks TallhDocument49 pagesWka CD, H Yd Ine - S WMDX.: 11 Jeks TallhJennifer wangNo ratings yet
- Maksut KuralayDocument6 pagesMaksut KuralayKuralay MaksutNo ratings yet
- PUSH Button ProjectDocument8 pagesPUSH Button ProjectEder GómezNo ratings yet
- 1.create A Program That Blinks The LED On The Development Board Using MBED SoftwareDocument8 pages1.create A Program That Blinks The LED On The Development Board Using MBED SoftwareG KalaiarasiNo ratings yet
- Prime Waveforms and Effects Settings for Guitar TonesDocument6 pagesPrime Waveforms and Effects Settings for Guitar TonesRubén AriasNo ratings yet
- Qrio Level 1: Leds ChallengesDocument12 pagesQrio Level 1: Leds ChallengesMhamad AyoubNo ratings yet
- DTW-2-Arduino Lab - ManualDocument13 pagesDTW-2-Arduino Lab - ManualTALAPANENI SASANKNo ratings yet
- MECH Arduino PPT 10 04 22Document24 pagesMECH Arduino PPT 10 04 22mayankdgaurNo ratings yet
- Pratique de microcontroleur et applicationsDocument6 pagesPratique de microcontroleur et applicationsBonasie LumbalaNo ratings yet
- Data TemplatesDocument7 pagesData TemplateskshitijNo ratings yet
- Codigo Circuito TinkercadDocument7 pagesCodigo Circuito TinkercadDaniel VargasNo ratings yet
- Variable PWM DC Motor Control Using Potentiometer and Toggle SwitchesDocument2 pagesVariable PWM DC Motor Control Using Potentiometer and Toggle SwitchessriramNo ratings yet
- Sena 30k QuickStartGuideDocument18 pagesSena 30k QuickStartGuideBobet MonosoNo ratings yet
- Activity1 2 3 LEDsDocument4 pagesActivity1 2 3 LEDsNarvasa, YsavelleNo ratings yet
- SMD RGB LED ModuleDocument5 pagesSMD RGB LED ModulejohnNo ratings yet
- (V302FA) TEXAS HOLD'EM EliteDocument21 pages(V302FA) TEXAS HOLD'EM ElitevdcosmaNo ratings yet
- Arduino Traffic Light CodeDocument5 pagesArduino Traffic Light CodeTyrone BautistaNo ratings yet
- PR-03-SERIES - Increment Encoder 38 MMDocument2 pagesPR-03-SERIES - Increment Encoder 38 MMSHARAB IMTIAZNo ratings yet
- Manual-Super Ball-English-2022-02-15Document14 pagesManual-Super Ball-English-2022-02-15Huguens DesrosiersNo ratings yet
- Worker Alert SystemDocument14 pagesWorker Alert SystemAditya KumarNo ratings yet
- Noise Dose Meter Model SL400: User GuideDocument18 pagesNoise Dose Meter Model SL400: User GuideTrisno WasitoNo ratings yet
- Assignment 1 - FMSEDocument3 pagesAssignment 1 - FMSEAbdullah TareenNo ratings yet
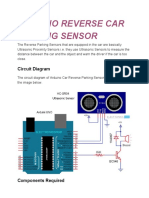
- Arduino Reverse Car Parking Sensor PDFDocument6 pagesArduino Reverse Car Parking Sensor PDFSaumya Thakur100% (1)
- JD740A User Manual R09.0 (321-400)Document80 pagesJD740A User Manual R09.0 (321-400)halfonsoNo ratings yet
- MICOM Test StepsDocument17 pagesMICOM Test Stepsahmedhelmy2012No ratings yet
- Resumen ArduinoDocument19 pagesResumen ArduinoRosarioNo ratings yet
- Feu SignalisationDocument1 pageFeu SignalisationFrancis RUKANNo ratings yet
- Auma Actuator DataDocument11 pagesAuma Actuator Datachinthala madhu babu67% (3)
- Date: 7/11/2021 Group: DurationDocument15 pagesDate: 7/11/2021 Group: DurationTam PhamNo ratings yet
- Data List / Active TestDocument2 pagesData List / Active TestJack CardiagNo ratings yet
- Operation System Euipo Ultrasonic CalibrationDocument55 pagesOperation System Euipo Ultrasonic CalibrationFernandoiNo ratings yet
- General Specification: TC10-L Temperature Controller (Limit Control Type)Document4 pagesGeneral Specification: TC10-L Temperature Controller (Limit Control Type)Dhirender DagarNo ratings yet
- ch05 03Document1 pagech05 03RUBEN DARIO SandovalNo ratings yet
- EX NO 2 LED ControlDocument3 pagesEX NO 2 LED ControlP.Rajeswari PSG-PTCNo ratings yet
- ch05 02Document1 pagech05 02RUBEN DARIO SandovalNo ratings yet
- Arduion Experiment WorkDocument21 pagesArduion Experiment Workmohamed ramadanNo ratings yet
- Aceron, Ryzcen Ford C. - Algorithm-And-Flowcharting-ExercisesDocument5 pagesAceron, Ryzcen Ford C. - Algorithm-And-Flowcharting-ExercisesRyzcen AceronNo ratings yet
- Laboratory Manual: Mr. Yoga B SDocument19 pagesLaboratory Manual: Mr. Yoga B SYoga B SNo ratings yet
- MP 2,3,4Document5 pagesMP 2,3,4tj millarNo ratings yet
- Projeto 1 (Guilherme Duarte)Document6 pagesProjeto 1 (Guilherme Duarte)Guilherme de Oliveira Sapucaia DuarteNo ratings yet
- How to Program an Arduino: Digital Inputs, Outputs, and If StatementsDocument9 pagesHow to Program an Arduino: Digital Inputs, Outputs, and If Statements'Andres TorregrosaNo ratings yet
- 27 Ao 31Document41 pages27 Ao 31brunogrange96No ratings yet
- IOT Experiment No - 8: 60001170058 Vatsal Rupera BE ElectronicsDocument4 pagesIOT Experiment No - 8: 60001170058 Vatsal Rupera BE ElectronicsPrasad mohiteNo ratings yet
- POKER KING調整圖 (P6-3 P6-4) -2Document31 pagesPOKER KING調整圖 (P6-3 P6-4) -2Henrry RamirezNo ratings yet
- 2.2 RGB LedDocument7 pages2.2 RGB LedFernando Reza CamposNo ratings yet
- Answers All Activities Cdi Grade 12 General & AdvanceDocument23 pagesAnswers All Activities Cdi Grade 12 General & Advancemahmoud albiakNo ratings yet
- Setting Icoming 20 KVDocument20 pagesSetting Icoming 20 KVDeivandra Ginanjar BhaktiNo ratings yet
- Manual Led Star Cob Led Star Multicolor 1Document10 pagesManual Led Star Cob Led Star Multicolor 1DayiNo ratings yet
- Experiment 7Document9 pagesExperiment 7abstudio0049No ratings yet
- Arduino blinking LED traffic lightsDocument2 pagesArduino blinking LED traffic lightsGudiel MendezNo ratings yet
- Meris OttobitJr Manual v3Document14 pagesMeris OttobitJr Manual v3ilyaNo ratings yet
- Basic Traffic Light (Red, Yellow, Green) With DelayDocument1 pageBasic Traffic Light (Red, Yellow, Green) With DelaysajjadhosenshehabNo ratings yet
- Basic Traffic Light (Red, Yellow, Green) With DelayDocument1 pageBasic Traffic Light (Red, Yellow, Green) With DelaysajjadhosenshehabNo ratings yet
- IoT Assignment - Measure Sensor ValuesDocument21 pagesIoT Assignment - Measure Sensor ValuesParamShahNo ratings yet
- ENGMANDocument3 pagesENGMANArchieval Baltazar OconerNo ratings yet
- MicrowaveDocument3 pagesMicrowaveArchieval Baltazar OconerNo ratings yet
- REVIEWERDocument12 pagesREVIEWERArchieval Baltazar OconerNo ratings yet
- eecoCHAPTER 1revisedDocument8 pageseecoCHAPTER 1revisedFreshness Tweetums Giron SimNo ratings yet
- ps#1Document1 pageps#1Archieval Baltazar Oconer0% (1)
- Ako Ay PilipinoDocument5 pagesAko Ay PilipinoArchieval Baltazar OconerNo ratings yet
- eecoCHAPTER 1revisedDocument8 pageseecoCHAPTER 1revisedFreshness Tweetums Giron SimNo ratings yet
- Activity No. 7: Ten (10) Solved Problems About Motion Using Integration and DifferentiationDocument2 pagesActivity No. 7: Ten (10) Solved Problems About Motion Using Integration and DifferentiationArchieval Baltazar OconerNo ratings yet
- Location Map Guide for Your VisitDocument1 pageLocation Map Guide for Your VisitArchieval Baltazar OconerNo ratings yet
- BroadcastDocument4 pagesBroadcastArchieval Baltazar OconerNo ratings yet
- Wire CommsDocument5 pagesWire CommsArchieval Baltazar OconerNo ratings yet
- BroadcastDocument4 pagesBroadcastArchieval Baltazar OconerNo ratings yet
- HCCS VisionDocument4 pagesHCCS VisionArchieval Baltazar OconerNo ratings yet
- BroadcastDocument4 pagesBroadcastArchieval Baltazar OconerNo ratings yet
- IB Chemistry 1 SL QuestionsDocument36 pagesIB Chemistry 1 SL QuestionsCamilla0% (3)
- Chap4 Q Consumer Behavior and Marketing StrategiesDocument14 pagesChap4 Q Consumer Behavior and Marketing StrategiesAdib WasiNo ratings yet
- Format No. 1-2019-PSS-01 Rev.1Document1 pageFormat No. 1-2019-PSS-01 Rev.1nithinNo ratings yet
- Fuel CellDocument71 pagesFuel CellAhmed Mostafa100% (1)
- AISC Design Guide 27 - Structural Stainless SteelDocument159 pagesAISC Design Guide 27 - Structural Stainless SteelCarlos Eduardo Rodriguez100% (1)
- Pressure Vessel DesignDocument8 pagesPressure Vessel DesignHector Javier Cruz CampaNo ratings yet
- Swancor 901 Data SheetDocument2 pagesSwancor 901 Data SheetErin Guillermo33% (3)
- Ureteral Trauma Profile in Soetomo Hospital January 2006 - December 2011Document9 pagesUreteral Trauma Profile in Soetomo Hospital January 2006 - December 2011Nurhafidin RamadhaniNo ratings yet
- Nursing Research in Canada 4th Edition Wood Test BankDocument25 pagesNursing Research in Canada 4th Edition Wood Test BankAllisonPowersrjqo100% (53)
- Dokumen - Tips Daewoo Service Manual Instrument Cluster Matiz-2023Document23 pagesDokumen - Tips Daewoo Service Manual Instrument Cluster Matiz-2023urexalg AlgériaNo ratings yet
- Gesell's Maturational TheoryDocument4 pagesGesell's Maturational TheorysanghuNo ratings yet
- h04 High Sulphidation Epithermal Au Ag CuDocument6 pagesh04 High Sulphidation Epithermal Au Ag CuErenz Emerald AlexandriteNo ratings yet
- PNLE III For Care of Clients With Physiologic and Psychosocial AlterationsDocument10 pagesPNLE III For Care of Clients With Physiologic and Psychosocial AlterationsANGELINE PALATINO100% (1)
- Service Manual: Side by Side S20B RSB21-A/GDocument16 pagesService Manual: Side by Side S20B RSB21-A/GjicutuNo ratings yet
- Nanostrength Block Copolymers For Epoxy TougheningDocument5 pagesNanostrength Block Copolymers For Epoxy TougheningRonald GeorgeNo ratings yet
- DAVAO DOCTORS COLLEGE NURSING DRUG STUDYDocument3 pagesDAVAO DOCTORS COLLEGE NURSING DRUG STUDYJerremy LuqueNo ratings yet
- Comp Carlyle Torque PDFDocument125 pagesComp Carlyle Torque PDFjsnavarro1o100% (2)
- ZHINENG Qigong Breathing Exercises ZBEDocument12 pagesZHINENG Qigong Breathing Exercises ZBELong Le100% (4)
- Directorate of Education, GNCT of Delhi: Term-II (Session 2021-22)Document4 pagesDirectorate of Education, GNCT of Delhi: Term-II (Session 2021-22)Anjli KulshresthaNo ratings yet
- Labor Law in United KingdomDocument108 pagesLabor Law in United KingdomPanagiotis OptionalNo ratings yet
- Parasitic Draw ChartDocument9 pagesParasitic Draw Chartlionellin83No ratings yet
- Business Plan: Prepare by Hau Teen Yee FabriceDocument26 pagesBusiness Plan: Prepare by Hau Teen Yee FabricekarimanrlfNo ratings yet
- "Channel Sampling": Forms & ChecklistDocument1 page"Channel Sampling": Forms & ChecklistevonNo ratings yet
- X PPT CH 12 ElectricityDocument12 pagesX PPT CH 12 ElectricityAakriti100% (1)
- MetallizationDocument51 pagesMetallizationjust4u2cjoshy67% (3)
- In Situ Cell Death KitDocument27 pagesIn Situ Cell Death KitckapodisNo ratings yet
- CPC Sample Exam 1Document9 pagesCPC Sample Exam 1Renika_r80% (5)
- DH 201 To 300 Bedded Revised Draft PDFDocument158 pagesDH 201 To 300 Bedded Revised Draft PDFAmit Kumar MishraNo ratings yet
- Chemical Reactions and Equations: Multiple Choice QuestionsDocument8 pagesChemical Reactions and Equations: Multiple Choice QuestionsSahana karpagamNo ratings yet
- TL102 0 2024 Che3701 0Document12 pagesTL102 0 2024 Che3701 0sollomontlou06No ratings yet



![Micro_project_Report_format[1]](https://imgv2-2-f.scribdassets.com/img/document/722711805/149x198/cf91d94528/1713031514?v=1)