You might also like
- High-Gain Observer-Based Adaptive Fuzzy Control For A Class of Multivariable Nonlinear SystemsDocument7 pagesHigh-Gain Observer-Based Adaptive Fuzzy Control For A Class of Multivariable Nonlinear SystemsAbdesselem BoulkrouneNo ratings yet
- An Improved Adaptive Fuzzy Backstepping Control For Nonlinear Mechanical Systems With Mismatched Uncertainties-1Document11 pagesAn Improved Adaptive Fuzzy Backstepping Control For Nonlinear Mechanical Systems With Mismatched Uncertainties-1Leroy Lionel SonfackNo ratings yet
- A New Robust LMI-based Model Predictive Control For Continuous-Time Uncertain Nonlinear SystemsDocument13 pagesA New Robust LMI-based Model Predictive Control For Continuous-Time Uncertain Nonlinear SystemsLuis CarvalhoNo ratings yet
- Adaptive Learning Feedback LinearizationDocument9 pagesAdaptive Learning Feedback LinearizationFouad YacefNo ratings yet
- Amc 15410Document14 pagesAmc 15410Ronny A. ChavezNo ratings yet
- Technichal Report: Adaptive Control For Linearizable Systems Using On-Policy Reinforcement LearningDocument17 pagesTechnichal Report: Adaptive Control For Linearizable Systems Using On-Policy Reinforcement LearningNguyễn Xuân KhảiNo ratings yet
- Mixed H2H Infinity Fuzzy Output Feedback ControlDocument17 pagesMixed H2H Infinity Fuzzy Output Feedback ControlKệ ThôiNo ratings yet
- Adaptive MPC For Iterative TasksDocument6 pagesAdaptive MPC For Iterative TasksEga PramNo ratings yet
- Adaptive Neural Network-Based Control For A Class of Nonlinear Pure-Feedback Systems With Time-Varying Full State ConstraintsDocument11 pagesAdaptive Neural Network-Based Control For A Class of Nonlinear Pure-Feedback Systems With Time-Varying Full State Constraintsle duc huynhNo ratings yet
- Model-Based Adaptive Critic Designs: Editor's SummaryDocument31 pagesModel-Based Adaptive Critic Designs: Editor's SummaryioncopaeNo ratings yet
- Adaptive ControlDocument6 pagesAdaptive ControlArghya ChakravartyNo ratings yet
- Adaptive Sliding Mode Control With Nonlinear Disturbance Observer For Uncertain Nonlinear System Based On Backstepping MethodDocument6 pagesAdaptive Sliding Mode Control With Nonlinear Disturbance Observer For Uncertain Nonlinear System Based On Backstepping MethodWaj DINo ratings yet
- Stabilization of Neutral Systems With Saturating Control InputsDocument17 pagesStabilization of Neutral Systems With Saturating Control InputsMoh IneNo ratings yet
- 07 - Sliding Mode Predictive Control of Linear Uncertain Systems With DelaysDocument7 pages07 - Sliding Mode Predictive Control of Linear Uncertain Systems With Delaysjap_thaygor5925No ratings yet
- Numerical Optimization-Based Extremum Seeking Control With Application To ABS DesignDocument14 pagesNumerical Optimization-Based Extremum Seeking Control With Application To ABS DesignDouglas CairesNo ratings yet
- Results in Physics: Mundher H.A. Yaseen, Haider J. AbdDocument7 pagesResults in Physics: Mundher H.A. Yaseen, Haider J. Abdbabylon telecomNo ratings yet
- Borelli Predictive Control PDFDocument424 pagesBorelli Predictive Control PDFcharlesNo ratings yet
- Research Article: Adaptive Barrier Control For Nonlinear Servomechanisms With Friction CompensationDocument11 pagesResearch Article: Adaptive Barrier Control For Nonlinear Servomechanisms With Friction CompensationSanjeev Kumar PandeyNo ratings yet
- Article 2019 Guessoum HanniDocument16 pagesArticle 2019 Guessoum HanniAzeddine DemNo ratings yet
- Simulation IEEEDocument21 pagesSimulation IEEEPablo Jose Prieto EntenzaNo ratings yet
- A Receding Horizon Generalization of Pointwise Min-Norm ControllersDocument12 pagesA Receding Horizon Generalization of Pointwise Min-Norm ControllersdgsdfjkgdfjksnNo ratings yet
- Deep Reinforcement Learning With Guaranteed Performance: Yinyan Zhang Shuai Li Xuefeng ZhouDocument237 pagesDeep Reinforcement Learning With Guaranteed Performance: Yinyan Zhang Shuai Li Xuefeng ZhouAnkit SharmaNo ratings yet
- Comparative Study of Model Order Reduction TechniquesDocument10 pagesComparative Study of Model Order Reduction TechniquesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 1 s2.0 S0167278920300026 MainDocument11 pages1 s2.0 S0167278920300026 MainJuan ZarateNo ratings yet
- Layered ControllerDocument25 pagesLayered ControllerJagadeesh MNo ratings yet
- R. Hayat, M. BussDocument8 pagesR. Hayat, M. BussSadiqNo ratings yet
- Model Free Nonlinear Robust Control Design Via Online Cri - 2022 - ISA TransactiDocument14 pagesModel Free Nonlinear Robust Control Design Via Online Cri - 2022 - ISA TransactiANDAHMOU SoulaimanNo ratings yet
- 2020 ADP Nonlinear System Mismatched Disterbances 2Document8 pages2020 ADP Nonlinear System Mismatched Disterbances 2Khải VũNo ratings yet
- Induced L Output Feedback Control For Continuous-Time SystemsDocument5 pagesInduced L Output Feedback Control For Continuous-Time Systemsjitenderkumar_goyal28No ratings yet
- Adaptive NN Fault Tolerant Control For Discrete Time Systems in Triangular Forms With Actuator Fault 2015 NeurocomputingDocument13 pagesAdaptive NN Fault Tolerant Control For Discrete Time Systems in Triangular Forms With Actuator Fault 2015 NeurocomputingAravindan MohanNo ratings yet
- LMI Relaxations and Its Application To Data-Driven Control Design For Switched Affine SystemsDocument21 pagesLMI Relaxations and Its Application To Data-Driven Control Design For Switched Affine Systemssumeet sahuNo ratings yet
- 约束非线性随机系统局部最优反馈控制的广义迭代 LQG 方法Document7 pages约束非线性随机系统局部最优反馈控制的广义迭代 LQG 方法咸水鱼No ratings yet
- Observer-Based Model Reference Adaptive Control For Unknown Time-Delay Chaotic Systems With Input NonlinearityDocument20 pagesObserver-Based Model Reference Adaptive Control For Unknown Time-Delay Chaotic Systems With Input Nonlinearityitzel macNo ratings yet
- An Introduction To Nonlinear Model Predictive ControlDocument23 pagesAn Introduction To Nonlinear Model Predictive ControlsaeedNo ratings yet
- Observer-Based Adaptive Fuzzy Backstepping Dynamic Surface Control For A Class of MIMO Nonlinear SystemsDocument12 pagesObserver-Based Adaptive Fuzzy Backstepping Dynamic Surface Control For A Class of MIMO Nonlinear Systemstidjani73No ratings yet
- Revised Paper vs12Document16 pagesRevised Paper vs12Long Trần ĐứcNo ratings yet
- Neurocomputing: Xiaofeng Li, Lei Xue, Changyin SunDocument8 pagesNeurocomputing: Xiaofeng Li, Lei Xue, Changyin SunmariaNo ratings yet
- Automatica: Kyriakos G. Vamvoudakis Frank L. LewisDocument11 pagesAutomatica: Kyriakos G. Vamvoudakis Frank L. LewisLộc Ong XuânNo ratings yet
- Active Vibration Control and Stability Analysis of Flexible Beam SystemsDocument202 pagesActive Vibration Control and Stability Analysis of Flexible Beam Systemsemad samirNo ratings yet
- ISA Transactions: Peyman Sindareh Esfahani, Jeffrey Kurt PieperDocument11 pagesISA Transactions: Peyman Sindareh Esfahani, Jeffrey Kurt PieperLuis CarvalhoNo ratings yet
- Husek - 2008 - Systems, Structure and ControlDocument256 pagesHusek - 2008 - Systems, Structure and Controlpss196203No ratings yet
- Ullah 2020Document8 pagesUllah 2020Samy Kharuf GutierrezNo ratings yet
- 05 - IEEE TRANSACTIONS ON CYBERNETICS 2017 - Adaptive Neural Network ControlDocument10 pages05 - IEEE TRANSACTIONS ON CYBERNETICS 2017 - Adaptive Neural Network ControlLâm BảoNo ratings yet
- Optimal State Estimation For Stochastic Systems: An Information Theoretic ApproachDocument15 pagesOptimal State Estimation For Stochastic Systems: An Information Theoretic ApproachJanett TrujilloNo ratings yet
- Hertneck, M., Kohler, J., Trimpe, S., and Allg Ower, F. Learning An Approximate Model Predictive Controller With Guarantees PDFDocument6 pagesHertneck, M., Kohler, J., Trimpe, S., and Allg Ower, F. Learning An Approximate Model Predictive Controller With Guarantees PDFKeerthana g.krishnanNo ratings yet
- Decentralized Adaptive Control of Nonlinear Large-Scale Pure-Feedback Interconnected Systems With Time-Varying DelaysDocument17 pagesDecentralized Adaptive Control of Nonlinear Large-Scale Pure-Feedback Interconnected Systems With Time-Varying DelaysMakis MathsNo ratings yet
- Robust Switching Adaptive Control of MulDocument15 pagesRobust Switching Adaptive Control of MulMahesh Kumar RathinamNo ratings yet
- Shen2019 PDFDocument8 pagesShen2019 PDFKARKAR NORANo ratings yet
- Automatic ControlDocument14 pagesAutomatic Controlmagdi elmalekNo ratings yet
- Ornelas Tellez2012Document13 pagesOrnelas Tellez2012Nors NoorNo ratings yet
- Arobust Extremum Seeking Scheme For Dynamic Systems WithDocument7 pagesArobust Extremum Seeking Scheme For Dynamic Systems Withforum algerieDZNo ratings yet
- TomTat LuanAn Xây Dựng Phương Pháp Tổng Hợp Hệ Điều Khiển Thích Nghi Bền Vững Cho - EnglishDocument27 pagesTomTat LuanAn Xây Dựng Phương Pháp Tổng Hợp Hệ Điều Khiển Thích Nghi Bền Vững Cho - EnglishMan EbookNo ratings yet
- ACCESS3148306Document9 pagesACCESS3148306atif6421724No ratings yet
- Optimal Tracking Control of Motion SystemsDocument11 pagesOptimal Tracking Control of Motion Systemsmousa bagherpourjahromiNo ratings yet
- Synthesis of Switching Controllers A Fuzzy SupervisorDocument16 pagesSynthesis of Switching Controllers A Fuzzy SupervisornooraniaNo ratings yet
- Adaptive Volterra Filters 265Document5 pagesAdaptive Volterra Filters 265Máximo Eduardo Morales PérezNo ratings yet
- Evaluation of Block-Oriented Models Use For The Purpose of Robust Controllers SynthesisDocument9 pagesEvaluation of Block-Oriented Models Use For The Purpose of Robust Controllers SynthesisJhonathanCamposResendeNo ratings yet
- Data-Driven Robust Approximate Optimal Tracking Control For Unknown General Nonlinear Systems Using Adaptive Dynamic Programming MethodDocument11 pagesData-Driven Robust Approximate Optimal Tracking Control For Unknown General Nonlinear Systems Using Adaptive Dynamic Programming MethodHari OM S. MishraNo ratings yet
- Modern Anti-windup Synthesis: Control Augmentation for Actuator SaturationFrom EverandModern Anti-windup Synthesis: Control Augmentation for Actuator SaturationRating: 5 out of 5 stars5/5 (1)
- Math 2280 - Final Exam: University of Utah Fall 2013Document20 pagesMath 2280 - Final Exam: University of Utah Fall 2013Abdesselem BoulkrouneNo ratings yet
- Nonlinear Control and Servo Systems (FRTN05)Document9 pagesNonlinear Control and Servo Systems (FRTN05)Abdesselem BoulkrouneNo ratings yet
- Opt 2009-12-14 TLDocument14 pagesOpt 2009-12-14 TLAbdesselem BoulkrouneNo ratings yet
- Theoretical Background of Nonlinear System Stability and ControlDocument45 pagesTheoretical Background of Nonlinear System Stability and ControlAbdesselem BoulkrouneNo ratings yet
- Kalman Kalman Kalman Kalman Filter Design Filter Design Filter Design Filter Design - Iii III III IIIDocument25 pagesKalman Kalman Kalman Kalman Filter Design Filter Design Filter Design Filter Design - Iii III III IIIAbdesselem BoulkrouneNo ratings yet
- CS 525: Linear Programming 1993 Final Exam SolutionDocument4 pagesCS 525: Linear Programming 1993 Final Exam SolutionAbdesselem BoulkrouneNo ratings yet
- Last Name (Print) : First Name:: May 10, 2001 7:15-9:15 A.m., 1221 Computer Sciences & StatisticsDocument9 pagesLast Name (Print) : First Name:: May 10, 2001 7:15-9:15 A.m., 1221 Computer Sciences & StatisticsAbdesselem BoulkrouneNo ratings yet
- Suggested Solution To Written Exam Introduction To Linear and Integer Programming (DM515)Document18 pagesSuggested Solution To Written Exam Introduction To Linear and Integer Programming (DM515)Abdesselem BoulkrouneNo ratings yet
- Lecture 32Document40 pagesLecture 32Abdesselem BoulkrouneNo ratings yet
- Unconstrained Minimization in R: Newton MethodsDocument5 pagesUnconstrained Minimization in R: Newton MethodsAbdesselem BoulkrouneNo ratings yet
- Draft Program ICCAD19Document18 pagesDraft Program ICCAD19Abdesselem BoulkrouneNo ratings yet
- Outline: Linear Quadratic RegulatorDocument3 pagesOutline: Linear Quadratic RegulatorAbdesselem BoulkrouneNo ratings yet
- T 3 SolDocument3 pagesT 3 SolAbdesselem BoulkrouneNo ratings yet
- Adaptive Finite Time Control of Nonlinear Quantized Systems With Actuator Dead-ZoneDocument11 pagesAdaptive Finite Time Control of Nonlinear Quantized Systems With Actuator Dead-ZoneAbdesselem BoulkrouneNo ratings yet
- Optimal Control (Course Code: 191561620)Document4 pagesOptimal Control (Course Code: 191561620)Abdesselem BoulkrouneNo ratings yet
- DPOCexam2017 Solution BBDocument20 pagesDPOCexam2017 Solution BBAbdesselem BoulkrouneNo ratings yet
- Today's Goal: X U X X (T) U (T)Document5 pagesToday's Goal: X U X X (T) U (T)Abdesselem BoulkrouneNo ratings yet
- Meraz Ka 2017Document6 pagesMeraz Ka 2017Abdesselem BoulkrouneNo ratings yet
- EL2620 Nonlinear Control Today's GoalDocument9 pagesEL2620 Nonlinear Control Today's GoalAbdesselem BoulkrouneNo ratings yet
- I. Introduction To Nonlinear Dynamics Question To The Class: Why Do We Model Things As Engineers?Document5 pagesI. Introduction To Nonlinear Dynamics Question To The Class: Why Do We Model Things As Engineers?Abdesselem BoulkrouneNo ratings yet
- Lec03 11 PDFDocument5 pagesLec03 11 PDFAbdesselem BoulkrouneNo ratings yet
- Equilibrium Points For Linear Systems Phase-Plane Analysis For Nonlinear SystemsDocument5 pagesEquilibrium Points For Linear Systems Phase-Plane Analysis For Nonlinear SystemsAbdesselem BoulkrouneNo ratings yet
- MCE693/793: Analysis and Control of Nonlinear Systems: Introduction To Describing FunctionsDocument31 pagesMCE693/793: Analysis and Control of Nonlinear Systems: Introduction To Describing FunctionsAbdesselem BoulkrouneNo ratings yet
- Deterministic Continuous Time Optimal Control and The Hamilton-Jacobi-Bellman EquationDocument7 pagesDeterministic Continuous Time Optimal Control and The Hamilton-Jacobi-Bellman EquationAbdesselem BoulkrouneNo ratings yet
- Automatica: Yan-Jun Liu Shaocheng TongDocument6 pagesAutomatica: Yan-Jun Liu Shaocheng TongAbdesselem BoulkrouneNo ratings yet
- ECE-S642 Optimal Control Solutions HW 4Document1 pageECE-S642 Optimal Control Solutions HW 4Abdesselem BoulkrouneNo ratings yet
- Logger 2 DataDocument137 pagesLogger 2 DataRun Ryan MaoNo ratings yet
- Prathmesh R Khapre (7y - 0m)Document4 pagesPrathmesh R Khapre (7y - 0m)sachinNo ratings yet
- Aws GluDocument17 pagesAws Glupratap16No ratings yet
- 2016 AfterSun-Cushion FoundationDocument2 pages2016 AfterSun-Cushion FoundationIra Murti SariNo ratings yet
- Disocont Tersus bvd2398gb PDFDocument4 pagesDisocont Tersus bvd2398gb PDFSuandi AnasNo ratings yet
- C 470 PDFDocument5 pagesC 470 PDFSencarcruz CruzNo ratings yet
- Aerospace & Defense Singles Ampacity RatingDocument2 pagesAerospace & Defense Singles Ampacity RatingScott DobartNo ratings yet
- Msds-qrr010905 915 d07 en Cleaning-AgentDocument6 pagesMsds-qrr010905 915 d07 en Cleaning-AgentnevilleborgNo ratings yet
- Report On Repairing of Batteries'Document7 pagesReport On Repairing of Batteries'LETVANGLEN CHONGLOINo ratings yet
- Solutions To In-Class Assignments (Chapter 3)Document5 pagesSolutions To In-Class Assignments (Chapter 3)smk1983No ratings yet
- A5/1 Security Project: Latest NewsDocument2 pagesA5/1 Security Project: Latest NewsJan NilssonNo ratings yet
- Irf 540Document8 pagesIrf 540Tom TweedleNo ratings yet
- Setup WizardDocument8 pagesSetup WizardInácio ConceiçãoNo ratings yet
- Process Design Dynamics-12Document45 pagesProcess Design Dynamics-12Abhitej KodaliNo ratings yet
- Seat Toledo (2005-... ) Accsessories Catalog (ENG)Document11 pagesSeat Toledo (2005-... ) Accsessories Catalog (ENG)J.K.jr.bad.No ratings yet
- 3-V To 5.5-V Multichannel Rs-232 Line Driver/Receiver With 15-Kv Iec Esd ProtectionDocument31 pages3-V To 5.5-V Multichannel Rs-232 Line Driver/Receiver With 15-Kv Iec Esd ProtectionFabian OrtuzarNo ratings yet
- RPA Whitepaper For AP & P2PDocument8 pagesRPA Whitepaper For AP & P2POm Krish RayNo ratings yet
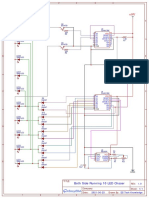
- Schematic - The Both Side Running 10 Led Chaser - 2021-06-25Document1 pageSchematic - The Both Side Running 10 Led Chaser - 2021-06-25julio quatriniNo ratings yet
- BSNL Tta Exam PaperDocument8 pagesBSNL Tta Exam PaperRajnish Chandra Prasad100% (1)
- Very High Input Impedance Excellent Trouble Shooting Tool 5 Functions, 43 RangesDocument1 pageVery High Input Impedance Excellent Trouble Shooting Tool 5 Functions, 43 RangesLuis SilvaNo ratings yet
- Refrigerant PipingDocument5 pagesRefrigerant PipingRezaNo ratings yet
- Management Information System: Assignment Ii Organization: Tata SteelDocument15 pagesManagement Information System: Assignment Ii Organization: Tata SteelNupoor JainNo ratings yet
- Adaptable Multi Nut Fastner With Manual Height Adjustment SystemDocument48 pagesAdaptable Multi Nut Fastner With Manual Height Adjustment SystemANAND KRISHNANNo ratings yet
- Steering Gear MechanismDocument13 pagesSteering Gear MechanismSuraj YadavNo ratings yet
- Is Code DetailsDocument3 pagesIs Code DetailsPunk GowthamanNo ratings yet
- Catalogue BrookDocument28 pagesCatalogue BrookMaiPrachanartNo ratings yet
- Windows 10 KMS KeysDocument3 pagesWindows 10 KMS Keyspeter_córdova_3No ratings yet
- YukoDocument13 pagesYukoRaj Gopal MishraNo ratings yet
- Apple Iphone Common Problems and Their Solutions 2019Document5 pagesApple Iphone Common Problems and Their Solutions 2019nCik SukasukiNo ratings yet