You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Mil and Moa Range Formulas For Different CombinationsDocument1 pageMil and Moa Range Formulas For Different CombinationsBob Simeone88% (8)
- Angle To The Right Traverse, Azimuth Traverse, and Latitude-Departure - S13aDocument12 pagesAngle To The Right Traverse, Azimuth Traverse, and Latitude-Departure - S13aTrice GelineNo ratings yet
- TABLE 3 - Conversion of Arc To TimeDocument1 pageTABLE 3 - Conversion of Arc To TimeSaifur Rahman BhuyanNo ratings yet
- Trigonometry Primer Problem Set Solns PDFDocument80 pagesTrigonometry Primer Problem Set Solns PDFderenz30No ratings yet
- Catatan Matematika - TrigonometriDocument1 pageCatatan Matematika - Trigonometri33 SHARA FEBRIANA ANGGRAINI100% (1)
- O.D Size Tebal Berat Inch MM MM KG/ Meter Kg/6 MeterDocument4 pagesO.D Size Tebal Berat Inch MM MM KG/ Meter Kg/6 MeterAdelia maharaniNo ratings yet
- 1st Summative Test in Pre-CalculusDocument3 pages1st Summative Test in Pre-CalculusAbbygail PerolinoNo ratings yet
- Sun PindayurdayaDocument25 pagesSun PindayurdayaAnonymous TWzli5No ratings yet
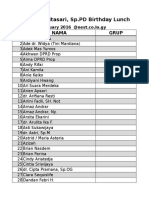
- Bunda Birthday ListDocument10 pagesBunda Birthday ListNiko Hizkia SimatupangNo ratings yet
- Basic Mathematics - DPP-01Document3 pagesBasic Mathematics - DPP-01mlzsschool.comNo ratings yet
- DLP-L01 - Angles in A Unit Circle (Pre-Cal)Document2 pagesDLP-L01 - Angles in A Unit Circle (Pre-Cal)Cydrick P DescalzoNo ratings yet
- Meopta ReticlesDocument45 pagesMeopta ReticlesdAUNo ratings yet
- (Worksheet KSSM AddMaths) Bab 1 - Sukatan Membulat (Form 5)Document9 pages(Worksheet KSSM AddMaths) Bab 1 - Sukatan Membulat (Form 5)Iffah Nor SyahirahNo ratings yet
- 2021 PPT - Radian and Degree Measure (XI - Math Basic)Document12 pages2021 PPT - Radian and Degree Measure (XI - Math Basic)DwayneNo ratings yet
- Screenshot 2022-11-22 at 09.52.58Document70 pagesScreenshot 2022-11-22 at 09.52.58Hernani IsmailNo ratings yet
- Red Dot 50yd Mod1 PDFDocument1 pageRed Dot 50yd Mod1 PDFRAYOSNo ratings yet
- Unit Circle Quiz Name: - : Innermost Circle of BoxesDocument3 pagesUnit Circle Quiz Name: - : Innermost Circle of BoxesskscribdNo ratings yet
- Nova Assignment 1 - Surveying Finals (Autosaved) (Autosaved) Nova Assignment 1 - Surveying FinalsDocument10 pagesNova Assignment 1 - Surveying Finals (Autosaved) (Autosaved) Nova Assignment 1 - Surveying FinalsKenNo ratings yet
- PPDB 2012Document8 pagesPPDB 2012Parwanto RuruNo ratings yet
- XRD Data PointsDocument70 pagesXRD Data PointsKhoniz NingthoujaNo ratings yet
- Performance Task #3.0 TrigonometryDocument3 pagesPerformance Task #3.0 TrigonometryBer HurriNo ratings yet
- FE Dog Net Needed (Melon)Document13 pagesFE Dog Net Needed (Melon)Alfredo Yahir Salinas UrbinaNo ratings yet
- Electrical Power Systems DDocument2 pagesElectrical Power Systems DdhrghamNo ratings yet
- Bird WingsDocument16 pagesBird WingsDecri KivonNo ratings yet
- RMR 10yd Mod2Document1 pageRMR 10yd Mod2Pyro0021No ratings yet
- Transformasi Geodetik-UTMDocument26 pagesTransformasi Geodetik-UTMRivaldo FDNo ratings yet
- Basic Maths - DPP 01 (Of Lecture 03) - Arjuna NEET Fastrack 2024Document3 pagesBasic Maths - DPP 01 (Of Lecture 03) - Arjuna NEET Fastrack 2024barnikbanerjee11No ratings yet
- 1 Find The Shaded Area in Each of The Following Circles. Leave Your Answers in Terms of Where AppropriateDocument4 pages1 Find The Shaded Area in Each of The Following Circles. Leave Your Answers in Terms of Where AppropriateboobooNo ratings yet
- Converting Radian Measure To Degree MeasureDocument1 pageConverting Radian Measure To Degree Measureacengr1No ratings yet
- Chapter 1 Full Solutions Addmaths F5 KSSMDocument23 pagesChapter 1 Full Solutions Addmaths F5 KSSMhusnäNo ratings yet