You might also like
- Vargsmal Eng PDFDocument37 pagesVargsmal Eng PDFJwanda100% (1)
- Mirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationDocument9 pagesMirror Descent and Nonlinear Projected Subgradient Methods For Convex OptimizationfurbyhaterNo ratings yet
- Part II: Lagrange Multiplier Method & Karush-Kuhn-Tucker (KKT) ConditionsDocument5 pagesPart II: Lagrange Multiplier Method & Karush-Kuhn-Tucker (KKT) ConditionsagrothendieckNo ratings yet
- Technical Services CatalogueDocument57 pagesTechnical Services CatalogueElson EgidioNo ratings yet
- Levenberg Marquardt AlgorithmDocument5 pagesLevenberg Marquardt AlgorithmNithin Mohan100% (5)
- Optimizing With GaDocument27 pagesOptimizing With GaFernando Nicolas Ureta GodoyNo ratings yet
- 4 Handling Constraints: F (X) X R C J 1, - . - , M C 0, K 1, - . - , MDocument10 pages4 Handling Constraints: F (X) X R C J 1, - . - , M C 0, K 1, - . - , MverbicarNo ratings yet
- Newton Gauss MethodDocument37 pagesNewton Gauss MethodLucas WeaverNo ratings yet
- Non Linear Programming ProblemsDocument66 pagesNon Linear Programming Problemsbits_who_am_iNo ratings yet
- Equality Constrained Optimization: Daniel P. RobinsonDocument33 pagesEquality Constrained Optimization: Daniel P. RobinsonJosue CofeeNo ratings yet
- Regularization Methods and Fixed Point Algorithms For A Ne Rank Minimization ProblemsDocument28 pagesRegularization Methods and Fixed Point Algorithms For A Ne Rank Minimization ProblemsVanidevi ManiNo ratings yet
- CS-110 Computational Engineering Numerical Methods: by A. Avudainayagam Department of MathematicsDocument67 pagesCS-110 Computational Engineering Numerical Methods: by A. Avudainayagam Department of MathematicsShellZeroNo ratings yet
- Notes HQDocument96 pagesNotes HQPiyush AgrahariNo ratings yet
- FUNCTIONSDocument12 pagesFUNCTIONSfrancis MagobaNo ratings yet
- Nonlinear Control Systems: Ant Onio Pedro Aguiar Pedro@isr - Ist.utl - PTDocument11 pagesNonlinear Control Systems: Ant Onio Pedro Aguiar Pedro@isr - Ist.utl - PTmushahid980No ratings yet
- Symmetry: Modified Jacobi-Gradient Iterative Method For Generalized Sylvester Matrix EquationDocument15 pagesSymmetry: Modified Jacobi-Gradient Iterative Method For Generalized Sylvester Matrix EquationEDU CIPANANo ratings yet
- Lec 24 Lagrange MultiplierDocument20 pagesLec 24 Lagrange MultiplierMuhammad Bilal JunaidNo ratings yet
- ECOM 6302: Engineering Optimization: Chapter ThreeDocument56 pagesECOM 6302: Engineering Optimization: Chapter Threeaaqlain100% (1)
- Acceleration Methods: Aitken's MethodDocument5 pagesAcceleration Methods: Aitken's MethodOubelaid AdelNo ratings yet
- 4curve Fitting TechniquesDocument32 pages4curve Fitting TechniquesSubhankarGangulyNo ratings yet
- Directional Secant Method For Nonlinear Equations: Heng-Bin An, Zhong-Zhi BaiDocument14 pagesDirectional Secant Method For Nonlinear Equations: Heng-Bin An, Zhong-Zhi Baisureshpareth8306No ratings yet
- Nonlinear ProgrammingDocument35 pagesNonlinear ProgrammingPreethi GopalanNo ratings yet
- Sparsity and Its MathematicsDocument44 pagesSparsity and Its MathematicsjwdaliNo ratings yet
- Lecture Notes-11: III. Introduction To Gaussian Random Variable (Normal Distribution)Document3 pagesLecture Notes-11: III. Introduction To Gaussian Random Variable (Normal Distribution)Arun Kumar DhupamNo ratings yet
- Constrained LSQDocument8 pagesConstrained LSQJ.No ratings yet
- Mark Rusi BolDocument55 pagesMark Rusi BolPat BustillosNo ratings yet
- A Spectral Approach To BandwidthDocument19 pagesA Spectral Approach To Bandwidthforoud_makvandi1985No ratings yet
- 3.1 Least-Squares ProblemsDocument28 pages3.1 Least-Squares ProblemsGabo GarcíaNo ratings yet
- Lec4 Gradient Method ReviseDocument33 pagesLec4 Gradient Method ReviseJose Lorenzo TrujilloNo ratings yet
- Combined Least SquaresDocument21 pagesCombined Least Squaressowmiyanarayanan_k_j88No ratings yet
- DownloadDocument7 pagesDownloadnootsamNo ratings yet
- FEM Lecture 3 Method of Weighted ResidualsDocument10 pagesFEM Lecture 3 Method of Weighted ResidualsHuma BaigNo ratings yet
- Levenberg-Marquardt Methods With Strong Local Convergence Properties For Solving Nonlinear Equations With Convex ConstraintsDocument25 pagesLevenberg-Marquardt Methods With Strong Local Convergence Properties For Solving Nonlinear Equations With Convex ConstraintsCristóbal Alberto Campos MuñozNo ratings yet
- Basic Iterative Methods For Solving Linear Systems PDFDocument33 pagesBasic Iterative Methods For Solving Linear Systems PDFradoevNo ratings yet
- Nonlinear Programming Methods.S1 Separable Programming: Problem StatementDocument10 pagesNonlinear Programming Methods.S1 Separable Programming: Problem StatementGUSTAVO EDUARDO ROCA MENDOZA0% (1)
- Notas de OptimizacionDocument3 pagesNotas de OptimizacionRaul Mijares EgueguigurenNo ratings yet
- Some Notes On Least Squares, QR-factorization, SVD and FittingDocument12 pagesSome Notes On Least Squares, QR-factorization, SVD and FittingmatteyasNo ratings yet
- 18.01 Single Variable Calculus, All NotesDocument193 pages18.01 Single Variable Calculus, All NotesGursimran PannuNo ratings yet
- Lagrange PDFDocument22 pagesLagrange PDFTrần Mạnh HùngNo ratings yet
- 12 OD Nonlinear Programming B-2008-2Document6 pages12 OD Nonlinear Programming B-2008-2carolinarvsocnNo ratings yet
- Penalty, Barrier and Augmented Lagrangian MethodsDocument10 pagesPenalty, Barrier and Augmented Lagrangian MethodsnisactNo ratings yet
- Operation ResearchDocument23 pagesOperation ResearchTahera ParvinNo ratings yet
- Nonlinear Programming PDFDocument224 pagesNonlinear Programming PDFLina Angarita HerreraNo ratings yet
- Numerical Optimization: Unit 9: Penalty Method and Interior Point Method Unit 10: Filter Method and The Maratos EffectDocument24 pagesNumerical Optimization: Unit 9: Penalty Method and Interior Point Method Unit 10: Filter Method and The Maratos EffectkahvumidragaispeciNo ratings yet
- 16 Primal DualDocument20 pages16 Primal Dualdexxt0rNo ratings yet
- A Singular Value Thresholding Algorithm For Matrix CompletionDocument28 pagesA Singular Value Thresholding Algorithm For Matrix CompletionphaniNo ratings yet
- The Fokker-Planck EquationDocument12 pagesThe Fokker-Planck EquationslamNo ratings yet
- Lagrange MultipliersDocument20 pagesLagrange MultipliersPooja PatwariNo ratings yet
- Beginner Matlab ODEDocument27 pagesBeginner Matlab ODEKen IkedaNo ratings yet
- Fast and Accurate Bessel Function Computation: John Harrison, Intel CorporationDocument22 pagesFast and Accurate Bessel Function Computation: John Harrison, Intel Corporationfeprinciples1607No ratings yet
- Differentiation MITDocument134 pagesDifferentiation MITRahul AgrawalNo ratings yet
- Stein 2011 DiffFilterDocument20 pagesStein 2011 DiffFiltersadasdasdffNo ratings yet
- Unconstrained and Constrained Optimization Algorithms by Soman K.PDocument166 pagesUnconstrained and Constrained Optimization Algorithms by Soman K.PprasanthrajsNo ratings yet
- Nonlinear Least Squares Data Fitting: Appendix DDocument16 pagesNonlinear Least Squares Data Fitting: Appendix DTâm NguyễnNo ratings yet
- Regularized Compression of A Noisy Blurred ImageDocument13 pagesRegularized Compression of A Noisy Blurred ImageAnonymous lVQ83F8mCNo ratings yet
- Scientific Computing - LESSON 8: Nonlinear Equations II 1Document5 pagesScientific Computing - LESSON 8: Nonlinear Equations II 1Lee Hei LongNo ratings yet
- 1 s2.0 S0747717197901103 MainDocument30 pages1 s2.0 S0747717197901103 MainMerbsTimeline (Merblin)No ratings yet
- Linearization of Nonlinear Equations by Dominick AndrisaniDocument13 pagesLinearization of Nonlinear Equations by Dominick AndrisaniChegrani AhmedNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- Guia 11 Despliegue de Menu DiagramDocument70 pagesGuia 11 Despliegue de Menu DiagramVictorTintayaMedinaNo ratings yet
- Cyclic Redundancy Check - Wikipedia, The Free EncyclopediaDocument10 pagesCyclic Redundancy Check - Wikipedia, The Free EncyclopediakirukirukiruNo ratings yet
- IA - Analysis I EgDocument8 pagesIA - Analysis I EgDedliNo ratings yet
- Ecmo TroubleshootingDocument1 pageEcmo TroubleshootingMitch ConnerNo ratings yet
- Language Hub Workbook Elementary Unit 1Document5 pagesLanguage Hub Workbook Elementary Unit 1Margaridavieira97No ratings yet
- Musical Dramaturgy in Jeux D'eau by Maurice Ravel: Gina-Mihaela PAVELDocument8 pagesMusical Dramaturgy in Jeux D'eau by Maurice Ravel: Gina-Mihaela PAVELGabrielNo ratings yet
- Upstream Uper-Intermediate XADocument6 pagesUpstream Uper-Intermediate XAOTILIA INA CRĂCEANo ratings yet
- You Have The Mark of The Beast Not Forwarding This To Nine People So Saith The Lord Your GodDocument70 pagesYou Have The Mark of The Beast Not Forwarding This To Nine People So Saith The Lord Your GodGo Og100% (1)
- Shunya CH 1-3Document71 pagesShunya CH 1-3lightningstar519No ratings yet
- Parts of SpeechDocument16 pagesParts of SpeechMaria Makrina MileniumNo ratings yet
- Bilang 881 or The Omnibus Election Code (Code) After TheDocument29 pagesBilang 881 or The Omnibus Election Code (Code) After TheNeil Angelo Pamfilo RodilNo ratings yet
- English 200Document3 pagesEnglish 200Rhom Lloyd OduyanNo ratings yet
- Poetry Quiz 1Document3 pagesPoetry Quiz 1ajnodNo ratings yet
- ZeNLP IndiaDocument116 pagesZeNLP IndiafenomenonNo ratings yet
- XI - English - The Summer of The Beautiful White HorseDocument3 pagesXI - English - The Summer of The Beautiful White HorseAkshat AggarwalNo ratings yet
- Screw Jack Selection: Product CodesDocument16 pagesScrew Jack Selection: Product CodesTrived DoijodNo ratings yet
- Directors DutiesDocument27 pagesDirectors Dutieskalaclinton644No ratings yet
- Byzantine Monastic Remains in SinaiDocument57 pagesByzantine Monastic Remains in SinaiJoe MagilNo ratings yet
- 2006 - Action For JusticeDocument20 pages2006 - Action For JusticeUnitarian Universalist Service CommitteeNo ratings yet
- Emergent LiteracyDocument5 pagesEmergent LiteracyHazelleFragoNo ratings yet
- Thematic Approach - A New Perspective in Teaching: January 2018Document8 pagesThematic Approach - A New Perspective in Teaching: January 2018Yayasan IbadurrohmanNo ratings yet
- Market Structure QuizDocument2 pagesMarket Structure QuizSamantha Ysabel Sqreem100% (1)
- Eaten Alive Script (1975-6)Document71 pagesEaten Alive Script (1975-6)Julius BanzonNo ratings yet
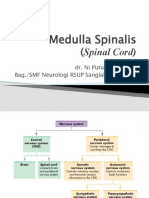
- Medulla Spinalis: (Spinal Cord)Document37 pagesMedulla Spinalis: (Spinal Cord)Dek SriNo ratings yet
- Present Simple: AffirmativeDocument1 pagePresent Simple: AffirmativeHOLTZ CODRUȚANo ratings yet
- Collaborative Learning: Peer TutoringDocument12 pagesCollaborative Learning: Peer TutoringFrancis Dave Nagum Mabborang IINo ratings yet
- Measures of Central Tendency and DispersionDocument4 pagesMeasures of Central Tendency and DispersionJohn Mark TimogNo ratings yet
- Year 5 English Grammar and Punctuation Test 4Document4 pagesYear 5 English Grammar and Punctuation Test 4Sunkyung KimNo ratings yet