You might also like
- LENU 319C TechnicalSales Product Study GuideDocument960 pagesLENU 319C TechnicalSales Product Study GuideHibaNo ratings yet
- Advant Controller PM665 Replacement Procedure Without Firmware - Rev2Document11 pagesAdvant Controller PM665 Replacement Procedure Without Firmware - Rev2Brijesh MenonNo ratings yet
- Brill Formulation: Instruction ManualDocument288 pagesBrill Formulation: Instruction Manualyvz100% (1)
- Dip S8ece Module3Document87 pagesDip S8ece Module3Neeraja JohnNo ratings yet
- Lec03 Image ProcDocument99 pagesLec03 Image ProcAnimesh SonwaneNo ratings yet
- Unit - 4 Image Enhancement (Part A)Document52 pagesUnit - 4 Image Enhancement (Part A)xx69dd69xxNo ratings yet
- Set-1 MAN-325Document119 pagesSet-1 MAN-325ul trNo ratings yet
- Dip Unit 4Document58 pagesDip Unit 4sheikdavoodNo ratings yet
- Module 3 - Point Trnsformations 2019Document8 pagesModule 3 - Point Trnsformations 201917D133 MANIKANDA PRABUNo ratings yet
- Dip Module2 2018 PDFDocument166 pagesDip Module2 2018 PDFveenaNo ratings yet
- Dip Unit2Document172 pagesDip Unit2Vaishnavi BavalekarNo ratings yet
- Digital Image Representation - Unit1Document26 pagesDigital Image Representation - Unit1renukaNo ratings yet
- ECES 682 Digital Image Processing: Oleh Tretiak ECE Department Drexel UniversityDocument23 pagesECES 682 Digital Image Processing: Oleh Tretiak ECE Department Drexel UniversityRashi AgarwalNo ratings yet
- Digital Image Processing NotesDocument363 pagesDigital Image Processing NotesKumbagalla ShivaNo ratings yet
- Image Processing: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005Document18 pagesImage Processing: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005supriya9900No ratings yet
- Image Processing: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005Document18 pagesImage Processing: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005supriya9900No ratings yet
- The Course: Image Representation Image Statistics Histograms Entropy Filters BooksDocument77 pagesThe Course: Image Representation Image Statistics Histograms Entropy Filters BooksAlwin RsNo ratings yet
- SIFT TransformDocument50 pagesSIFT Transformk191292 Hassan JamilNo ratings yet
- DIP4-Image Enhancement (Point Processing)Document39 pagesDIP4-Image Enhancement (Point Processing)MaggieNo ratings yet
- Digital Image Processing: Ming-Sui (Amy) Lee Mar. 8, 2007Document43 pagesDigital Image Processing: Ming-Sui (Amy) Lee Mar. 8, 2007faqihinsaniinthecatNo ratings yet
- 06 - Edge DetectionDocument43 pages06 - Edge DetectionIzaan ShaikhNo ratings yet
- Lec 12 Edge DetectionDocument22 pagesLec 12 Edge DetectionIqrakhanNo ratings yet
- Chap. 3: Image Enhancement in The Spatial Domain: Spring 2006, Jen-Chang Liu Csie, NcnuDocument34 pagesChap. 3: Image Enhancement in The Spatial Domain: Spring 2006, Jen-Chang Liu Csie, NcnuSelect dsouzaNo ratings yet
- A Simple Image ModelDocument32 pagesA Simple Image ModelKins SunilNo ratings yet
- Ip Lect 7Document34 pagesIp Lect 7api-3696125No ratings yet
- (Main Concepts) : Digital Image ProcessingDocument7 pages(Main Concepts) : Digital Image ProcessingalshabotiNo ratings yet
- Scale Invariant Feature Transform (SIFT) : CS 763 Ajit RajwadeDocument52 pagesScale Invariant Feature Transform (SIFT) : CS 763 Ajit RajwadeashuraNo ratings yet
- Image EnhancementDocument84 pagesImage Enhancementyogini choudharyNo ratings yet
- CHP - 1 - Fundamentals of Digital Image MinDocument15 pagesCHP - 1 - Fundamentals of Digital Image MinAbhijay Singh JainNo ratings yet
- 04 - 05 - 06 - Unit I - Image Sensing and Acqusition - Sampling Quantization - Relationship Between PixelsDocument38 pages04 - 05 - 06 - Unit I - Image Sensing and Acqusition - Sampling Quantization - Relationship Between PixelsD.BASKAR HICET STAFF ECENo ratings yet
- Lecture Week 2A 2018 PDFDocument89 pagesLecture Week 2A 2018 PDFalfalfa manNo ratings yet
- ImageProcessing4 ImageEnhancement (PointProcessing)Document28 pagesImageProcessing4 ImageEnhancement (PointProcessing)asif01cseNo ratings yet
- Some Basic Operations On ImagesDocument22 pagesSome Basic Operations On ImagesPrateek AgrawalNo ratings yet
- Image ProcessingDocument10 pagesImage ProcessingNalaka SenanayakaNo ratings yet
- Cp467 12 Lecture17 SegmentationDocument66 pagesCp467 12 Lecture17 Segmentationsatyastriver1518No ratings yet
- Lect3-Filtering in Spatial Domain IDocument55 pagesLect3-Filtering in Spatial Domain IsouravNo ratings yet
- Image Warping and Morphing: 15-463: Computational Photography Alexei Efros, CMU, Fall 2011Document40 pagesImage Warping and Morphing: 15-463: Computational Photography Alexei Efros, CMU, Fall 2011pcbugNo ratings yet
- Image Processing: Gaurav GuptaDocument38 pagesImage Processing: Gaurav GuptaSnehal ChotheNo ratings yet
- Image Processing: Gaurav GuptaDocument38 pagesImage Processing: Gaurav GuptaanithaNo ratings yet
- Lecture 6Document8 pagesLecture 6WARDAH FATIMANo ratings yet
- Spatial Filtering: CS474/674 - Prof. BebisDocument55 pagesSpatial Filtering: CS474/674 - Prof. BebisNitheeshNo ratings yet
- CSC320L05Document118 pagesCSC320L05Anu S SNo ratings yet
- 03 - Digital Image FundamentalsDocument58 pages03 - Digital Image FundamentalsMohamed Abd El EmamNo ratings yet
- Coe4Tn3 Image Processing: Wavelet and Multiresolution Wavelet and Multiresolution ProcessingDocument9 pagesCoe4Tn3 Image Processing: Wavelet and Multiresolution Wavelet and Multiresolution ProcessingAbdela Aman MtechNo ratings yet
- Dip 03 04 05 06Document172 pagesDip 03 04 05 06saeed samieeNo ratings yet
- DIP6Document45 pagesDIP6Lovely dollNo ratings yet
- Spatial FilteringDocument50 pagesSpatial FilteringeduhelloNo ratings yet
- Coe4Tn3 Image Processing: Image Enhancement in The Spatial Image Enhancement in The Spatial DomainDocument12 pagesCoe4Tn3 Image Processing: Image Enhancement in The Spatial Image Enhancement in The Spatial DomainSudha PatelNo ratings yet
- IT5409 Ch3 Filters 20200228 v3 Part1Document120 pagesIT5409 Ch3 Filters 20200228 v3 Part1Bui Minh DucNo ratings yet
- IT5409 Ch3 Filters 20200228 v3 Part1Document144 pagesIT5409 Ch3 Filters 20200228 v3 Part1Nguyễn Đình LâmNo ratings yet
- ImageBasic - 0.1haDocument92 pagesImageBasic - 0.1haDương Lê HồngNo ratings yet
- Lec10 Image EnhancmentDocument27 pagesLec10 Image EnhancmentIqrakhanNo ratings yet
- Mathematical Tools in DIP - 2Document52 pagesMathematical Tools in DIP - 2sahilNo ratings yet
- Digital Image Processing IntroductionDocument123 pagesDigital Image Processing IntroductionDeepa SNo ratings yet
- DIP Lecture2 PDFDocument38 pagesDIP Lecture2 PDFHafiz Shakeel Ahmad AwanNo ratings yet
- Point ProcessingDocument24 pagesPoint ProcessingBelal DaradkahNo ratings yet
- Lec 1 PrintDocument13 pagesLec 1 PrintPolito PogbaNo ratings yet
- Lecture #7: Digital Image ProcessingDocument33 pagesLecture #7: Digital Image ProcessingDon VaiNo ratings yet
- Lect 2Document30 pagesLect 2Hermain KarimNo ratings yet
- Chapter 6 Image EnhancementDocument53 pagesChapter 6 Image EnhancementSaikarNo ratings yet
- Pyramid Image Processing: Exploring the Depths of Visual AnalysisFrom EverandPyramid Image Processing: Exploring the Depths of Visual AnalysisNo ratings yet
- Histogram Equalization: Enhancing Image Contrast for Enhanced Visual PerceptionFrom EverandHistogram Equalization: Enhancing Image Contrast for Enhanced Visual PerceptionNo ratings yet
- DAA Unit 1Document84 pagesDAA Unit 1Sarvesh AhujaNo ratings yet
- New Digital Phase Meter Concept and Its Application: Articles You May Be Interested inDocument9 pagesNew Digital Phase Meter Concept and Its Application: Articles You May Be Interested inIsaias Bartolomeu SambgaNo ratings yet
- Envea QSG Modbus Rs485 Module For Cairsens enDocument12 pagesEnvea QSG Modbus Rs485 Module For Cairsens encarlos silvaNo ratings yet
- 22UBCON211D - UB Learning Trends Report 2023-Top 100 Skills Infographic InfographicDocument1 page22UBCON211D - UB Learning Trends Report 2023-Top 100 Skills Infographic InfographicAkshayNo ratings yet
- Simple FiltersDocument40 pagesSimple FiltersPranav PasteNo ratings yet
- FB5003 - Seminar 1: "Management Information Systems"Document64 pagesFB5003 - Seminar 1: "Management Information Systems"Koey TseNo ratings yet
- Sec-Erb Engineering Standards: Eastern Region Branch Saudi Electricity CompanyDocument55 pagesSec-Erb Engineering Standards: Eastern Region Branch Saudi Electricity Companyexa academyNo ratings yet
- Blue Oyster Cult - Then Came The Last Days of MayDocument9 pagesBlue Oyster Cult - Then Came The Last Days of Mayandre otoniNo ratings yet
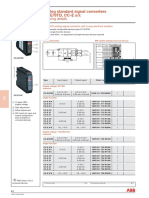
- ABB - Ma and V Signal Converter and IsolatorDocument2 pagesABB - Ma and V Signal Converter and IsolatorKmj KmjNo ratings yet
- Video Game Development and User Experience: Graham Mcallister and Gareth R. WhiteDocument11 pagesVideo Game Development and User Experience: Graham Mcallister and Gareth R. WhiteParamaresthi WindriyaniNo ratings yet
- Citations by Category - Local SEO - MozDocument7 pagesCitations by Category - Local SEO - MozEric AlllsenNo ratings yet
- Present Continuous Tense - Frequency Adverbs - Summary (English 1 - 2020)Document20 pagesPresent Continuous Tense - Frequency Adverbs - Summary (English 1 - 2020)Débora Ortiz FNo ratings yet
- 1 Module 1 Parallelism Fundamentals Motivation Key Concepts and Challenges Parallel ComputingDocument81 pages1 Module 1 Parallelism Fundamentals Motivation Key Concepts and Challenges Parallel ComputingSAMINA ATTARINo ratings yet
- PressedDocument165 pagesPressedThe DarkNo ratings yet
- Am5K2E0X Multicore Arm Keystone Ii System-On-Chip (Soc)Document252 pagesAm5K2E0X Multicore Arm Keystone Ii System-On-Chip (Soc)Joseph BernardNo ratings yet
- Eagle Quantum Premier 8 Channel Relay Module Model EQ3720RM: Specification DataDocument4 pagesEagle Quantum Premier 8 Channel Relay Module Model EQ3720RM: Specification DataLogan Marquez AguayoNo ratings yet
- Camara Digital Olympus d-545Document138 pagesCamara Digital Olympus d-545Roderick Lenhardt FontanNo ratings yet
- PAL16L8AM, PAL16L8A-2M, PAL16R4AM, PAL16R4A-2M PAL16R6AM, PAL16R6A-2M, PAL16R8AM, PAL16R8A-2M Standard High-Speed Pal CircuitsDocument16 pagesPAL16L8AM, PAL16L8A-2M, PAL16R4AM, PAL16R4A-2M PAL16R6AM, PAL16R6A-2M, PAL16R8AM, PAL16R8A-2M Standard High-Speed Pal CircuitsHo PhuNo ratings yet
- What Is Active DirectoryDocument10 pagesWhat Is Active Directorylloyd jason VicenteNo ratings yet
- Guide To MVP Design SystemDocument34 pagesGuide To MVP Design SystemIbizanloveNo ratings yet
- A Literature Survey On Social Engineering Attacks: Phishing AttackDocument4 pagesA Literature Survey On Social Engineering Attacks: Phishing AttackSantosh KBNo ratings yet
- Camp Odyssey DocumentDocument11 pagesCamp Odyssey DocumentJayy AyyyNo ratings yet
- Manual 0402 Eng2015Document32 pagesManual 0402 Eng2015BAKINEC AZERSKIYNo ratings yet
- Marketing NHOS GUIDE en v3Document13 pagesMarketing NHOS GUIDE en v3faselnewsNo ratings yet
- Advanced Auditing - MCQ Full SyallabusDocument21 pagesAdvanced Auditing - MCQ Full Syallabussonali ghatvilkarNo ratings yet
- Assignment 1Document3 pagesAssignment 1Atharva KadamNo ratings yet
- Programming in C BE AllDocument11 pagesProgramming in C BE AllSUh-sUn StHaNo ratings yet