You might also like
- GitHub - Oros42 - IMSI-Catcher This Program Show You IMSI Numbers of Cellphones Around You.Document5 pagesGitHub - Oros42 - IMSI-Catcher This Program Show You IMSI Numbers of Cellphones Around You.Ekaterina HoffmannNo ratings yet
- 4G CommandDocument3 pages4G Commandvivek100% (2)
- Cool CommandsDocument6 pagesCool CommandsAl GambardellaNo ratings yet
- Ns2 Streaming Implementations Tutorial VCarrascalDocument11 pagesNs2 Streaming Implementations Tutorial VCarrascalnoormohd99No ratings yet
- 1 Linux Syllabus 10 Feb 2k7Document10 pages1 Linux Syllabus 10 Feb 2k7Anuja UpadhyeNo ratings yet
- Esp32 Et MQTTDocument7 pagesEsp32 Et MQTTLlouis PhysicsNo ratings yet
- HOWTO Ethereal Wireshark Trace enDocument9 pagesHOWTO Ethereal Wireshark Trace enJose Carlos Fernandez VargasNo ratings yet
- Simple MSAG CommisioningDocument7 pagesSimple MSAG CommisioningabtNo ratings yet
- CN NS2 Program 5Document4 pagesCN NS2 Program 5KEEP CALM studiosNo ratings yet
- RFS InstallationDocument1 pageRFS Installationjayasree r sNo ratings yet
- Network Simulator (Ns-2) Workshop Mannual: SAT InfosysDocument10 pagesNetwork Simulator (Ns-2) Workshop Mannual: SAT InfosysRaghav ManaiNo ratings yet
- Pembahasan Server Ujikom-Gladi11Document5 pagesPembahasan Server Ujikom-Gladi11Inda MulianaNo ratings yet
- Monitoring Netflow With NfSenDocument5 pagesMonitoring Netflow With NfSenThanhNN0312No ratings yet
- Log2 - Shutdown Not VisibleDocument11 pagesLog2 - Shutdown Not VisibleSparco MNo ratings yet
- Commissioning and ConfigurationDocument28 pagesCommissioning and ConfigurationAbduNo ratings yet
- P780Document50 pagesP780Shailesh BhanushaliNo ratings yet
- 7.1.2.4 Packet Tracer - Configuring VPNs (Optional) InstructionsDocument6 pages7.1.2.4 Packet Tracer - Configuring VPNs (Optional) InstructionsParitosh KumarNo ratings yet
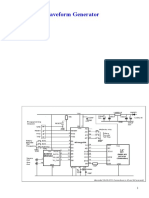
- AD9850 Waveform GeneratorDocument9 pagesAD9850 Waveform GeneratorDemixManNo ratings yet
- New 12345676543Document6 pagesNew 12345676543support LogsNo ratings yet
- Log1 Shutdown VisibleDocument11 pagesLog1 Shutdown VisibleSparco MNo ratings yet
- Team17 HiddenCommandsDocument9 pagesTeam17 HiddenCommandsasdfqewvgresvgNo ratings yet
- Guía Burros QadapterDocument4 pagesGuía Burros QadapterJose Mendez BellidoNo ratings yet
- Dev WebdispDocument10 pagesDev WebdispNikunj ThakerNo ratings yet
- Flytrap Exploit Enhancements 12 2007 Dev NotesDocument18 pagesFlytrap Exploit Enhancements 12 2007 Dev Notes0xbitNo ratings yet
- Command List MTCL - MGRDocument6 pagesCommand List MTCL - MGRWilliam Santos de AmorimNo ratings yet
- Codigo en C para Transmision FM en RaspberryDocument5 pagesCodigo en C para Transmision FM en RaspberryRFID DemarkaNo ratings yet
- CCNA Guia Practica 6Document6 pagesCCNA Guia Practica 6AndyNo ratings yet
- AixDocument19 pagesAixDani ElmiNo ratings yet
- Ee333x Project 3 ReportDocument7 pagesEe333x Project 3 Reportapi-341323410No ratings yet
- NS-2 Tutorial: Demokritos University of ThraceDocument31 pagesNS-2 Tutorial: Demokritos University of Thraceidra_fisNo ratings yet
- LastDocument5 pagesLastThinh HoangNo ratings yet
- 3com MSR Router CommandDocument12 pages3com MSR Router CommandSaurrabh Nanda100% (1)
- Node MoshellDocument15 pagesNode MoshellMENANI ZineddineNo ratings yet
- Segmentation Offloading With Wireshark and EthtoolDocument4 pagesSegmentation Offloading With Wireshark and EthtoolMehmet DemirNo ratings yet
- 8/3/2011 Install Front EndDocument9 pages8/3/2011 Install Front EndnadahvnNo ratings yet
- Dev IcmDocument138 pagesDev IcmNilesh Satose0% (1)
- Os Week 9Document6 pagesOs Week 9Movie explained in KannadaNo ratings yet
- Practical-9: Wireshark Packet Capture and Measurement of Various Types of Delay in TCPDocument27 pagesPractical-9: Wireshark Packet Capture and Measurement of Various Types of Delay in TCPnooneNo ratings yet
- AixusefulcommandsDocument20 pagesAixusefulcommandsparsontanNo ratings yet
- AIX For System Administrators - CommandsDocument5 pagesAIX For System Administrators - Commandsdanielvp21No ratings yet
- Department of Computer Science & Engineering: Lab Manual of Wireless Communication Lab Etec 463Document38 pagesDepartment of Computer Science & Engineering: Lab Manual of Wireless Communication Lab Etec 463Kingsterz gamingNo ratings yet
- Experiment No 2 GSMDocument8 pagesExperiment No 2 GSMDakshata WaghNo ratings yet
- Packet AnalyzerDocument9 pagesPacket AnalyzerHarinisanthoshNo ratings yet
- Putty - Log Csmsapp1Document619 pagesPutty - Log Csmsapp1Rinkesh TripathiNo ratings yet
- Fujitsu Siemens Amilo Pro v3515Document51 pagesFujitsu Siemens Amilo Pro v3515capstan567No ratings yet
- Command 1Document141 pagesCommand 1Harlen Hutahaean67% (3)
- A 1 Cool CommandsDocument10 pagesA 1 Cool CommandsAl GambardellaNo ratings yet
- AIX Command Crib Sheet: 1 MiscellaneousDocument15 pagesAIX Command Crib Sheet: 1 Miscellaneouschandu102103No ratings yet
- New Text DocumentDocument8 pagesNew Text DocumentUgs nguNo ratings yet
- AR Drone Control API NotesDocument3 pagesAR Drone Control API NotesWildani HadiNo ratings yet
- CISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkFrom EverandCISCO PACKET TRACER LABS: Best practice of configuring or troubleshooting NetworkNo ratings yet
- Network with Practical Labs Configuration: Step by Step configuration of Router and Switch configurationFrom EverandNetwork with Practical Labs Configuration: Step by Step configuration of Router and Switch configurationNo ratings yet
- Network Security All-in-one: ASA Firepower WSA Umbrella VPN ISE Layer 2 SecurityFrom EverandNetwork Security All-in-one: ASA Firepower WSA Umbrella VPN ISE Layer 2 SecurityNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Cisco CCNA Command Guide: An Introductory Guide for CCNA & Computer Networking Beginners: Computer Networking, #3From EverandCisco CCNA Command Guide: An Introductory Guide for CCNA & Computer Networking Beginners: Computer Networking, #3No ratings yet
- The Fourth Terminal: Benefits of Body-Biasing Techniques for FDSOI Circuits and SystemsFrom EverandThe Fourth Terminal: Benefits of Body-Biasing Techniques for FDSOI Circuits and SystemsSylvain ClercNo ratings yet
- Computer Networking: An introductory guide for complete beginners: Computer Networking, #1From EverandComputer Networking: An introductory guide for complete beginners: Computer Networking, #1Rating: 4.5 out of 5 stars4.5/5 (2)