You might also like
- 26 Feedback Example: The Inverted PendulumDocument12 pages26 Feedback Example: The Inverted PendulumAhmed Essam Abd RabouNo ratings yet
- Modes in Linear CircuitsDocument13 pagesModes in Linear CircuitsmtichyNo ratings yet
- Classical Mechanics (HONS) : Tut 1 (14 Feb, 2011) : T S XSDocument4 pagesClassical Mechanics (HONS) : Tut 1 (14 Feb, 2011) : T S XSprince926No ratings yet
- Guidelines For Authors 1Document15 pagesGuidelines For Authors 1Praveen Kumar RNo ratings yet
- Control Chapter 1 - Lecture 1Document29 pagesControl Chapter 1 - Lecture 13re0oooNo ratings yet
- Regulator ProblemDocument10 pagesRegulator ProblemcarriegosNo ratings yet
- Lecturer 19 Signals & SystemsDocument27 pagesLecturer 19 Signals & SystemsPrashanna YadavNo ratings yet
- Mass, Stiffness, and Damping Matrices From Measured Modal ParametersDocument5 pagesMass, Stiffness, and Damping Matrices From Measured Modal Parametersho-faNo ratings yet
- Lyapunov MITDocument18 pagesLyapunov MITAnwesha MukhopadhyayNo ratings yet
- Lec#19-24 - Laplace DomainDocument42 pagesLec#19-24 - Laplace DomainDaniya AbbasiNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Lecture 6: Stability of Dynamic Systems Lyapunov's Direct Method 6.1 Notions of StabilityDocument10 pagesLecture 6: Stability of Dynamic Systems Lyapunov's Direct Method 6.1 Notions of Stabilitytennis1949No ratings yet
- Anomalous Relaxation Oscillations Due To Dynamical Traps: I.A. Lubashevsky, V.V. Gaychuk, A.V. DemchukDocument9 pagesAnomalous Relaxation Oscillations Due To Dynamical Traps: I.A. Lubashevsky, V.V. Gaychuk, A.V. DemchukvagafNo ratings yet
- LagrangianDocument23 pagesLagrangianrp dotgNo ratings yet
- Laboratory 3: The LCR Circuit: Forced, Damped Oscillations.: Phys130 Fall, 2003Document5 pagesLaboratory 3: The LCR Circuit: Forced, Damped Oscillations.: Phys130 Fall, 2003Virali DoshiNo ratings yet
- The Feynman Lectures On Physics Vol. II Ch. 25 - Electrodynamics in Relativistic NotationDocument1 pageThe Feynman Lectures On Physics Vol. II Ch. 25 - Electrodynamics in Relativistic NotationGuYue LiNo ratings yet
- Behaviour of Nonlinear SystemsDocument11 pagesBehaviour of Nonlinear SystemsCheenu SinghNo ratings yet
- Physics 364: Problem Set 2: (a) µ (a) ν 0 (a) (3) (a)Document2 pagesPhysics 364: Problem Set 2: (a) µ (a) ν 0 (a) (3) (a)MachodogNo ratings yet
- Lax Pair Formulation in The Simultaneous Presence of Boundaries and DefectsDocument19 pagesLax Pair Formulation in The Simultaneous Presence of Boundaries and DefectsMuhammad Hasan RazaNo ratings yet
- 2.3 Linear Approximation of Physical SystemsDocument3 pages2.3 Linear Approximation of Physical SystemsramNo ratings yet
- Classical Dynamics: Example Sheet 1: Comments Welcome: Please Send Them To Berry Groisman (bg268@)Document4 pagesClassical Dynamics: Example Sheet 1: Comments Welcome: Please Send Them To Berry Groisman (bg268@)Shweta SridharNo ratings yet
- Transform Methods: X(S) S JW JW SDocument16 pagesTransform Methods: X(S) S JW JW SAbdullahee YeaheryeaNo ratings yet
- Chaos Some 1-D Discontinuous Maps That Appear The Electrical CircuitsDocument10 pagesChaos Some 1-D Discontinuous Maps That Appear The Electrical CircuitsO Doutor FantasticNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Variational Principles and Hamiltonian Mechanics: A Primer On Geometric MechanicsDocument43 pagesVariational Principles and Hamiltonian Mechanics: A Primer On Geometric MechanicsTongc VoNo ratings yet
- Mass, Stiffness, and Damping Matrices From Measured Modal ParametersDocument5 pagesMass, Stiffness, and Damping Matrices From Measured Modal ParametersOscar Daga CaravantesNo ratings yet
- Stabilization of Nonlinear SystemDocument7 pagesStabilization of Nonlinear SystemSaht Park Ulyshi AhaanNo ratings yet
- :: نشكيس يزاجح دمحم ريمس دمحم مسلاا 2 Observer state feedbackDocument7 pages:: نشكيس يزاجح دمحم ريمس دمحم مسلاا 2 Observer state feedbackmohamed samierNo ratings yet
- 22 08 17Document80 pages22 08 17PartheebanNo ratings yet
- MT ZadaniaDocument9 pagesMT Zadaniakhaled shaabanNo ratings yet
- Kuramoto 1984Document18 pagesKuramoto 1984Lambu CarmelNo ratings yet
- EE200 Lec06Document14 pagesEE200 Lec06Priya GangwarNo ratings yet
- Tutorial 5: XT EutDocument2 pagesTutorial 5: XT EutNornis DalinaNo ratings yet
- Nonlinear and Adaptive Control: An Abbreviated Status ReportDocument15 pagesNonlinear and Adaptive Control: An Abbreviated Status ReportOwais KhanNo ratings yet
- Chaos in The Fractional Order Lorenz SystemDocument10 pagesChaos in The Fractional Order Lorenz Systemi.ethemsacuNo ratings yet
- ELE 301, Fall 2010 Laboratory No. 7 Stability and Root Locus PlotsDocument4 pagesELE 301, Fall 2010 Laboratory No. 7 Stability and Root Locus PlotsAnonymous WkbmWCa8MNo ratings yet
- Goudas Paper PDFDocument9 pagesGoudas Paper PDFJaime Fisica RedolfoNo ratings yet
- Classical Mechanics P601Document1 pageClassical Mechanics P601Satyaki ChowdhuryNo ratings yet
- ACS Experiments 3,4Document5 pagesACS Experiments 3,4Aditya SharmaNo ratings yet
- MATLAB Tools For Linear and Nonlinear System Stability Theorem ImplementationDocument7 pagesMATLAB Tools For Linear and Nonlinear System Stability Theorem ImplementationFared O'riordanNo ratings yet
- About Robust Control On Nonlinear Chaotic Oscillators: Mihaela ClejuDocument5 pagesAbout Robust Control On Nonlinear Chaotic Oscillators: Mihaela ClejuBodoShowNo ratings yet
- Difference Equations in Normed Spaces: Stability and OscillationsFrom EverandDifference Equations in Normed Spaces: Stability and OscillationsNo ratings yet
- 15 - Orbital Angular Momentum and Spherical Harmonics PDFDocument13 pages15 - Orbital Angular Momentum and Spherical Harmonics PDFUltrazordNo ratings yet
- Hamiltonian PDFDocument64 pagesHamiltonian PDFAnnaNo ratings yet
- : نشكيس يزاجح دمحم ر يمس دمحم: مسلاا 2 Observer state feedbackDocument7 pages: نشكيس يزاجح دمحم ر يمس دمحم: مسلاا 2 Observer state feedbackmohamed samierNo ratings yet
- Application of Laplace Analysis To ControlDocument20 pagesApplication of Laplace Analysis To ControlRiki SaputraNo ratings yet
- Chapter 4.PsDocument11 pagesChapter 4.PsPaula DamasfNo ratings yet
- Correlation XXDocument18 pagesCorrelation XXDalson EloyNo ratings yet
- CDC 2000Document6 pagesCDC 2000Martina SORNo ratings yet
- Force Transmissibility of A Nonlinear Vibration Isolator With High-Static-Low-Dynamic-StiffnessDocument7 pagesForce Transmissibility of A Nonlinear Vibration Isolator With High-Static-Low-Dynamic-StiffnesshamadeeNo ratings yet
- LectureSeries 01 SHMDocument42 pagesLectureSeries 01 SHMSUBIR KUMAR DasNo ratings yet
- Ic Tech Report 199704Document28 pagesIc Tech Report 199704Rafael Gonçalves de LimaNo ratings yet
- Analytical - FinalDocument10 pagesAnalytical - FinalHayder AlsarajNo ratings yet
- Chap 2 HyperbolicDocument14 pagesChap 2 HyperbolicB Raghavendra BejgamNo ratings yet
- The Radially Vibrating Spherical Quantum BilliardDocument12 pagesThe Radially Vibrating Spherical Quantum BilliardJosé Rojas OlavarríaNo ratings yet
- Wed January 23 Lecture Notes: Coordinate Transformations and Nonlinear DynamicsDocument12 pagesWed January 23 Lecture Notes: Coordinate Transformations and Nonlinear DynamicsSimi ChNo ratings yet
- Transverse Linearization For Mechanical Systems With Several Passive Degrees of Freedom With Applications To Orbital StabilizationDocument6 pagesTransverse Linearization For Mechanical Systems With Several Passive Degrees of Freedom With Applications To Orbital StabilizationViktor SokolovNo ratings yet
- Special Relativity: Massachusetts Institute of TechnologyDocument18 pagesSpecial Relativity: Massachusetts Institute of TechnologymarioasensicollantesNo ratings yet
- Sample Annual BudgetDocument4 pagesSample Annual BudgetMary Ann B. GabucanNo ratings yet
- Hager Pricelist May 2014Document64 pagesHager Pricelist May 2014rajinipre-1No ratings yet
- Environmental Auditing For Building Construction: Energy and Air Pollution Indices For Building MaterialsDocument8 pagesEnvironmental Auditing For Building Construction: Energy and Air Pollution Indices For Building MaterialsAhmad Zubair Hj YahayaNo ratings yet
- Functions of Commercial Banks: Primary and Secondary FunctionsDocument3 pagesFunctions of Commercial Banks: Primary and Secondary FunctionsPavan Kumar SuralaNo ratings yet
- A Review Paper On Improvement of Impeller Design A Centrifugal Pump Using FEM and CFDDocument3 pagesA Review Paper On Improvement of Impeller Design A Centrifugal Pump Using FEM and CFDIJIRSTNo ratings yet
- KSU OGE 23-24 AffidavitDocument1 pageKSU OGE 23-24 Affidavitsourav rorNo ratings yet
- What Is Retrofit in Solution Manager 7.2Document17 pagesWhat Is Retrofit in Solution Manager 7.2PILLINAGARAJUNo ratings yet
- Profile On Sheep and Goat FarmDocument14 pagesProfile On Sheep and Goat FarmFikirie MogesNo ratings yet
- DC Servo MotorDocument6 pagesDC Servo MotortaindiNo ratings yet
- Efs151 Parts ManualDocument78 pagesEfs151 Parts ManualRafael VanegasNo ratings yet
- Electricity 10thDocument45 pagesElectricity 10thSuryank sharmaNo ratings yet
- Hexoskin - Information For Researchers - 01 February 2023Document48 pagesHexoskin - Information For Researchers - 01 February 2023emrecan cincanNo ratings yet
- 23 Things You Should Know About Excel Pivot Tables - Exceljet PDFDocument21 pages23 Things You Should Know About Excel Pivot Tables - Exceljet PDFRishavKrishna0% (1)
- Asphalt Plant Technical SpecificationsDocument5 pagesAsphalt Plant Technical SpecificationsEljoy AgsamosamNo ratings yet
- The Internal Environment: Resources, Capabilities, Competencies, and Competitive AdvantageDocument5 pagesThe Internal Environment: Resources, Capabilities, Competencies, and Competitive AdvantageHenny ZahranyNo ratings yet
- Cam Action: Series: Inch StandardDocument6 pagesCam Action: Series: Inch StandardVishwa NNo ratings yet
- Apm p5 Course NotesDocument267 pagesApm p5 Course NotesMusumbulwe Sue MambweNo ratings yet
- Rofi Operation and Maintenance ManualDocument3 pagesRofi Operation and Maintenance ManualSteve NewmanNo ratings yet
- SBL - The Event - QuestionDocument9 pagesSBL - The Event - QuestionLucio Indiana WalazaNo ratings yet
- BMA Recital Hall Booking FormDocument2 pagesBMA Recital Hall Booking FormPaul Michael BakerNo ratings yet
- XgxyDocument22 pagesXgxyLïkïth RäjNo ratings yet
- PFI High Flow Series Single Cartridge Filter Housing For CleaningDocument2 pagesPFI High Flow Series Single Cartridge Filter Housing For Cleaningbennypartono407No ratings yet
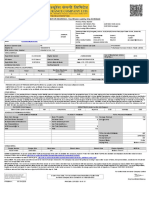
- MOTOR INSURANCE - Two Wheeler Liability Only SCHEDULEDocument1 pageMOTOR INSURANCE - Two Wheeler Liability Only SCHEDULESuhail V VNo ratings yet
- Privacy: Based On Slides Prepared by Cyndi Chie, Sarah Frye and Sharon Gray. Fifth Edition Updated by Timothy HenryDocument50 pagesPrivacy: Based On Slides Prepared by Cyndi Chie, Sarah Frye and Sharon Gray. Fifth Edition Updated by Timothy HenryAbid KhanNo ratings yet
- Income Statement, Its Elements, Usefulness and LimitationsDocument5 pagesIncome Statement, Its Elements, Usefulness and LimitationsDipika tasfannum salamNo ratings yet
- Personal Best B1+ Unit 1 Reading TestDocument2 pagesPersonal Best B1+ Unit 1 Reading TestFy FyNo ratings yet
- 3125 Vitalogic 4000 PDFDocument444 pages3125 Vitalogic 4000 PDFvlaimirNo ratings yet
- MDOF (Multi Degre of FreedomDocument173 pagesMDOF (Multi Degre of FreedomRicky Ariyanto100% (1)
- LOG-2-8-FLEETWAREHOUSE-TEMPLATE-Waybill-Delivery Note-IFRCDocument1 pageLOG-2-8-FLEETWAREHOUSE-TEMPLATE-Waybill-Delivery Note-IFRCMNo ratings yet
- GL 186400 Case DigestDocument2 pagesGL 186400 Case DigestRuss TuazonNo ratings yet