You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 2008-2010 Mitsubishi Lancer Wiring Diagrams (M3030000100019)Document10 pages2008-2010 Mitsubishi Lancer Wiring Diagrams (M3030000100019)Reverencio B. Gabor0% (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsFrom EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsRating: 3.5 out of 5 stars3.5/5 (6)
- Operational Amplifier Circuits: Analysis and DesignFrom EverandOperational Amplifier Circuits: Analysis and DesignRating: 4.5 out of 5 stars4.5/5 (2)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- 12v DC To220v Ac Inverter ReportDocument35 pages12v DC To220v Ac Inverter Reportabhishek kalshetti100% (3)
- Radio Frequency Transistors: Principles and Practical ApplicationsFrom EverandRadio Frequency Transistors: Principles and Practical ApplicationsRating: 4 out of 5 stars4/5 (2)
- DCAC Pure Sine WaveDocument69 pagesDCAC Pure Sine WaveTrie NouNo ratings yet
- All Parts of Starter Motor and FunctionDocument4 pagesAll Parts of Starter Motor and FunctionBeverly Sotomayor CrisologoNo ratings yet
- InstallationDirective C13 IvecoDocument60 pagesInstallationDirective C13 Ivecoblaktion0% (1)
- P. C. Sen - Principles of Electric Machines 2edDocument634 pagesP. C. Sen - Principles of Electric Machines 2edwilliancsm100% (1)
- Beginning Digital Electronics through ProjectsFrom EverandBeginning Digital Electronics through ProjectsRating: 5 out of 5 stars5/5 (1)
- Development of Pure Sine Wave Inversion System With Inbuilt Charging and Display MechanismsDocument6 pagesDevelopment of Pure Sine Wave Inversion System With Inbuilt Charging and Display MechanismsHector OrozcoNo ratings yet
- Transformer Regulation - Losses (As Per TC Name Plate) (1.1.19)Document4 pagesTransformer Regulation - Losses (As Per TC Name Plate) (1.1.19)jiguparmar1516No ratings yet
- LaboratoryManualForOperationalAmplifiersAndLinearICs 3E PDFDocument130 pagesLaboratoryManualForOperationalAmplifiersAndLinearICs 3E PDFRajalingam BossNo ratings yet
- Superconducting Rotating MachinesDocument3 pagesSuperconducting Rotating MachinesDhinesh Dhinzz100% (1)
- A Practical Activity Report Submitted For Engineering Design Project - II (UTA024) byDocument31 pagesA Practical Activity Report Submitted For Engineering Design Project - II (UTA024) byTania CENo ratings yet
- PresentationDocument44 pagesPresentationRohit chachdaNo ratings yet
- Ec8361 Ece Adcl Even Iiise LabmanualDocument82 pagesEc8361 Ece Adcl Even Iiise LabmanualPackirisamy NavaneethakrishnanNo ratings yet
- NV6128 Datasheet-3076917Document26 pagesNV6128 Datasheet-3076917mNo ratings yet
- EEE - 537 - MIDTERM - 2222796 (Taslina Akter)Document10 pagesEEE - 537 - MIDTERM - 2222796 (Taslina Akter)Taslina AkterNo ratings yet
- A Project Report On MINI INVERTER 12V TODocument27 pagesA Project Report On MINI INVERTER 12V TOcarryminati iNo ratings yet
- InverterDocument31 pagesInverterĐẹp PhanNo ratings yet
- Design and Execution of A DC Source With High Power and High EfficiencyDocument19 pagesDesign and Execution of A DC Source With High Power and High EfficiencyInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- EE198B - Wireless Battery Charger PDFDocument21 pagesEE198B - Wireless Battery Charger PDFV'nod Rathode BNo ratings yet
- Digital Experiments 22-6-19Document111 pagesDigital Experiments 22-6-19allanjwilsonNo ratings yet
- Design and Development of An X-Ray Machine, Francisco Piernas DiazDocument40 pagesDesign and Development of An X-Ray Machine, Francisco Piernas DiazArmandinho CaveroNo ratings yet
- Sine Inverter Controller With 8 Bit MicrocontrollerDocument8 pagesSine Inverter Controller With 8 Bit MicrocontrollerBillGNo ratings yet
- EE2203-Electronic Device and Circuits Question BankDocument11 pagesEE2203-Electronic Device and Circuits Question BankAnbarasan Annamalai100% (1)
- DC/DC BOOST CONVERTER TRAINERDocument7 pagesDC/DC BOOST CONVERTER TRAINERblaze emberNo ratings yet
- 190321420894-Amani N MringoDocument21 pages190321420894-Amani N MringoAmani MringoNo ratings yet
- LaboratoryManualForOperationalAmplifiersAndLinearICs 3EDocument130 pagesLaboratoryManualForOperationalAmplifiersAndLinearICs 3EMVRajeshMaliyeckalNo ratings yet
- BECL404 -ManualDocument36 pagesBECL404 -Manualbnchoukimath100% (1)
- Design Strategy For A 3-Phase Variable Frequency Drive (VFD) PDFDocument37 pagesDesign Strategy For A 3-Phase Variable Frequency Drive (VFD) PDFSamuel Mushaka100% (1)
- Linear Integrated Circuits 70 Interview Questions and Solutions 2 - DivyumDocument14 pagesLinear Integrated Circuits 70 Interview Questions and Solutions 2 - Divyumbalu56kvNo ratings yet
- Manual Med ElectromagDocument48 pagesManual Med ElectromagglenvcNo ratings yet
- New ProjectDocument13 pagesNew ProjectAnkit Kushwaha0% (1)
- New ProjectDocument13 pagesNew Projectkaran gargNo ratings yet
- Ut Em3 Variablefreqdrivetheory PDFDocument86 pagesUt Em3 Variablefreqdrivetheory PDFMichael JohnstonNo ratings yet
- Ehsan (3050) Lab 05Document7 pagesEhsan (3050) Lab 05Antenna /// Power ElectronicsNo ratings yet
- Resonant&Buck ChopperDocument18 pagesResonant&Buck ChopperKata Naresh BabuNo ratings yet
- Sample1 Project2 ECE4430 F16Document20 pagesSample1 Project2 ECE4430 F16Digvijay Bansal JiiggiNo ratings yet
- Direct Energy Converter Controllers For SRMsDocument252 pagesDirect Energy Converter Controllers For SRMspdseetharam009No ratings yet
- 1.circuits and Simulation Integrated Laboratory 2013 RegulationDocument46 pages1.circuits and Simulation Integrated Laboratory 2013 RegulationNandha KumarNo ratings yet
- Variable DC Power SupplyDocument8 pagesVariable DC Power SupplyAizaz Hussain ShahNo ratings yet
- Citizens Band 2-Way Mobile Radio: Model 19 DXDocument18 pagesCitizens Band 2-Way Mobile Radio: Model 19 DXbellscb100% (2)
- Capacitor Reforming InstructionsDocument14 pagesCapacitor Reforming Instructions98654321No ratings yet
- Application Note AN040: Folded Dipole Antenna For CC2400, CC2420, CC2430, CC2431, and CC2480Document27 pagesApplication Note AN040: Folded Dipole Antenna For CC2400, CC2420, CC2430, CC2431, and CC2480Nandam VamsiNo ratings yet
- 938 Aurora Boulevard, Cubao, Quezon City: Technological Institute of The PhilippinesDocument10 pages938 Aurora Boulevard, Cubao, Quezon City: Technological Institute of The PhilippinesMikko OmanaNo ratings yet
- Analog and Digital Ic'S Short Questions With AnswersDocument41 pagesAnalog and Digital Ic'S Short Questions With Answerspriya adhavanNo ratings yet
- EDC_21BEE0321[1] (1)Document16 pagesEDC_21BEE0321[1] (1)lakshit.choudhary2021No ratings yet
- Power Electronics Lab Manual With Orcad Pspice 10.5Document36 pagesPower Electronics Lab Manual With Orcad Pspice 10.5Muhammad Ahtisham Asif100% (2)
- Power Electronics Drives U3Document66 pagesPower Electronics Drives U3Ruvenderan SuburamaniamNo ratings yet
- Electronic Principles and Circuits Lab Manual - BEC303 - 18-11-2023Document69 pagesElectronic Principles and Circuits Lab Manual - BEC303 - 18-11-2023Maithira H0% (1)
- Project memo AN 02.12.56 model verification and design challengesDocument13 pagesProject memo AN 02.12.56 model verification and design challengesbpchimeraNo ratings yet
- Evaluation Board For Off-Line Forward Converter Based On L5991Document25 pagesEvaluation Board For Off-Line Forward Converter Based On L5991Grzegorz WegnerNo ratings yet
- Design of A High Performance Rectenna For Wireless Powering 2.45Ghz RfidsDocument8 pagesDesign of A High Performance Rectenna For Wireless Powering 2.45Ghz RfidsAminaNo ratings yet
- Switching Control of Inverter Using SPWM Technique: © 2015 IJIRT - Volume 1 Issue 12 - ISSN: 2349-6002Document8 pagesSwitching Control of Inverter Using SPWM Technique: © 2015 IJIRT - Volume 1 Issue 12 - ISSN: 2349-6002WasimNo ratings yet
- ECC508 Electronics Engineering Lab - II - VLSIDocument40 pagesECC508 Electronics Engineering Lab - II - VLSIRAJA RAMALINGAMNo ratings yet
- Sharmi ECE a-D-Circuits Lab ManualDocument74 pagesSharmi ECE a-D-Circuits Lab ManualSharmila83No ratings yet
- Lab 8 - Power Supply Design 2022Document16 pagesLab 8 - Power Supply Design 2022ain shikroniNo ratings yet
- B.M.A.S Engineering College Of: EEE-602-Power ElectronicsDocument21 pagesB.M.A.S Engineering College Of: EEE-602-Power ElectronicsChandradhar KonetiNo ratings yet
- AcknowledgementDocument16 pagesAcknowledgementSourav MahariNo ratings yet
- CTV32 Training ManualDocument37 pagesCTV32 Training ManuallitlejhonNo ratings yet
- CTs 2ch Series Operation-08-13 OriginalDocument19 pagesCTs 2ch Series Operation-08-13 Originaltipo33No ratings yet
- Nhom 3 Managing Risk Through Effective Team-Based Decision MakingDocument4 pagesNhom 3 Managing Risk Through Effective Team-Based Decision MakingPhuoc DangNo ratings yet
- Ceiling and electrical plan drawingDocument1 pageCeiling and electrical plan drawingNilay JethavaNo ratings yet
- Esi GS4200Document2 pagesEsi GS4200hagh_mostafa2787No ratings yet
- AP1509Document12 pagesAP1509Андрей ОлененкоNo ratings yet
- Generador de Tonos 300MB PDFDocument2 pagesGenerador de Tonos 300MB PDFLogan Marquez AguayoNo ratings yet
- Classic 61⁄2′′ Woofer FeaturesDocument2 pagesClassic 61⁄2′′ Woofer FeaturesBob HwknsNo ratings yet
- S.No Equipment Name Quantity: Electrical Power Consumption 1. Dammam Gas Chlorination Unit - 200 KG /HRDocument3 pagesS.No Equipment Name Quantity: Electrical Power Consumption 1. Dammam Gas Chlorination Unit - 200 KG /HRprabhuanand1986No ratings yet
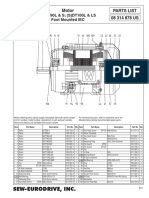
- Sew-Eurodrive, Inc.: MotorDocument1 pageSew-Eurodrive, Inc.: MotorcmaradiagaNo ratings yet
- Philips HDRW 720 Service Manual PDFDocument211 pagesPhilips HDRW 720 Service Manual PDFPatrick CampionNo ratings yet
- Basic Circuit of Op-Amp: KNJ2463 Mohd Syahmi JamaludinDocument18 pagesBasic Circuit of Op-Amp: KNJ2463 Mohd Syahmi JamaludinPetrus Petz WtzNo ratings yet
- LCD Module Specification Sheet for MTC-C162DPLY-2N DisplayDocument17 pagesLCD Module Specification Sheet for MTC-C162DPLY-2N Displayashwin_mcseNo ratings yet
- Optical Communication System Components CharacterizationDocument16 pagesOptical Communication System Components CharacterizationCyrille MagdiNo ratings yet
- A Beginner's Guide To Modeling With NEC: Part 3-Sources, Grounds and SweepsDocument5 pagesA Beginner's Guide To Modeling With NEC: Part 3-Sources, Grounds and SweepsRavi RathodNo ratings yet
- Simulation and Tests On Surge Arresters in High-Voltage LaboratoryDocument5 pagesSimulation and Tests On Surge Arresters in High-Voltage LaboratoryM. REZA FEBRI PUTRANo ratings yet
- SSG Course Outline DJM 5103Document7 pagesSSG Course Outline DJM 5103api-293198287100% (1)
- Figure 1. Schematic Diagram of The IOT System: DigitalinputDocument5 pagesFigure 1. Schematic Diagram of The IOT System: DigitalinputCristian Măndică100% (2)
- TAIT TB7100Document124 pagesTAIT TB7100vjt.radioNo ratings yet
- MarineDiesel VGT-series, Electrical Troubleshooting Manual (Ver 1.0)Document58 pagesMarineDiesel VGT-series, Electrical Troubleshooting Manual (Ver 1.0)poknik 1400No ratings yet
- LABORATORY REPORT 2: Differential Amplifier Objectives:: TheoryDocument5 pagesLABORATORY REPORT 2: Differential Amplifier Objectives:: TheoryKidist kefelegnNo ratings yet
- Pililla Wind FarmDocument7 pagesPililla Wind FarmASTIG TVNo ratings yet
- LINEAR INTEGRATED CIRCUITS Unit3 Raghudathesh VTUDocument30 pagesLINEAR INTEGRATED CIRCUITS Unit3 Raghudathesh VTUraghudatheshNo ratings yet
- DDZ1513 Single Phase: Smart Meter (Class1)Document2 pagesDDZ1513 Single Phase: Smart Meter (Class1)GNNo ratings yet
- Manual Basler Avr Decs200 NDocument192 pagesManual Basler Avr Decs200 NSandro Muniz SouzaNo ratings yet


















































![EDC_21BEE0321[1] (1)](https://imgv2-2-f.scribdassets.com/img/document/723160704/149x198/ffe58ab7a3/1713173622?v=1)