You might also like
- Evans PDE Solution Chapter 3 Nonlinear First-Order PDEDocument6 pagesEvans PDE Solution Chapter 3 Nonlinear First-Order PDEPubavaNo ratings yet
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesFrom EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesRating: 1.5 out of 5 stars1.5/5 (2)
- Random ForestDocument8 pagesRandom ForestColan VladNo ratings yet
- Galois Theory 4th Stewart Solution ManualDocument9 pagesGalois Theory 4th Stewart Solution ManualAndrea Maxcy100% (31)
- Lec 3Document15 pagesLec 3jessica magdyNo ratings yet
- Solutions To Reinforcement Learning by Sutton Chapter 4 r5Document5 pagesSolutions To Reinforcement Learning by Sutton Chapter 4 r5이강민No ratings yet
- Cs748 s2021 Quizzes Till q4Document4 pagesCs748 s2021 Quizzes Till q4Mahesh AbnaveNo ratings yet
- Homework #3: MDPS, Q-Learning, &: PomdpsDocument18 pagesHomework #3: MDPS, Q-Learning, &: Pomdpsshivam pradhanNo ratings yet
- 5 Temporal Difference LearningDocument25 pages5 Temporal Difference LearningyilvasNo ratings yet
- CS 748 (Spring 2021) : Weekly Quizzes: Week 2Document2 pagesCS 748 (Spring 2021) : Weekly Quizzes: Week 2Mahesh AbnaveNo ratings yet
- Derivatele FCT ElementareDocument2 pagesDerivatele FCT Elementarealexbogy77No ratings yet
- Lecture 15Document4 pagesLecture 15sachin bhadangNo ratings yet
- 10W 12WP Math 5209Document21 pages10W 12WP Math 5209aye pyoneNo ratings yet
- 1 More On The Cayley-Hamilton Theorem: MAE 280A 1 Maur Icio de OliveiraDocument7 pages1 More On The Cayley-Hamilton Theorem: MAE 280A 1 Maur Icio de OliveiraMouliNo ratings yet
- Cinematica Vectorial 2021Document4 pagesCinematica Vectorial 2021Norbil Jampier Purihuamán SánchezNo ratings yet
- فصل ۱ ptcDocument15 pagesفصل ۱ ptcmobn keshtgarNo ratings yet
- Construction of The RealsDocument17 pagesConstruction of The RealsmesfaisantNo ratings yet
- State Space To Transfer Function Examples PDFDocument2 pagesState Space To Transfer Function Examples PDFGerald AguilarNo ratings yet
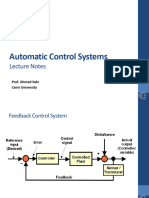
- Lecture No. 4 - Dr. SakrDocument12 pagesLecture No. 4 - Dr. SakrMohamed Essam HusseinNo ratings yet
- Laplace FormulaeDocument4 pagesLaplace FormulaeRISHABH JAINNo ratings yet
- 1 1W 8 12WP Math 5209Document23 pages1 1W 8 12WP Math 5209aye pyoneNo ratings yet
- Non-Deterministic Reward and ActionDocument2 pagesNon-Deterministic Reward and ActionReddy BunnyNo ratings yet
- L 3 LinearOptics Rev1Document80 pagesL 3 LinearOptics Rev1シリーズスーパNo ratings yet
- CMPE 58K, Assignment 3: Expectation-Maximization DerivationDocument2 pagesCMPE 58K, Assignment 3: Expectation-Maximization DerivationBilge GokselNo ratings yet
- Formulario Temas 2 y 3 PDFDocument2 pagesFormulario Temas 2 y 3 PDFFernando José RiveraNo ratings yet
- Formulario Temas 2 y 3 PDFDocument2 pagesFormulario Temas 2 y 3 PDFFernando José RiveraNo ratings yet
- Robotics1 Test 09.11.10Document5 pagesRobotics1 Test 09.11.10asalifew belachewNo ratings yet
- Qu 2825Document3 pagesQu 2825api-3861295No ratings yet
- Lecture1 Classical RegressionDocument47 pagesLecture1 Classical Regressiontr7No ratings yet
- Identidades y Propiedades Matemáticas.: = − 2 α α α cos cos cos ± = ⋅ ⋅ m sen ω = + 2 = + 2Document1 pageIdentidades y Propiedades Matemáticas.: = − 2 α α α cos cos cos ± = ⋅ ⋅ m sen ω = + 2 = + 2LEONELA REYESNo ratings yet
- N N 1 N N 1: M N N+MDocument2 pagesN N 1 N N 1: M N N+MkentookuraNo ratings yet
- 5ta PC Mate 4 2Document5 pages5ta PC Mate 4 2José Poma SlisNo ratings yet
- Lec 4Document16 pagesLec 4jessica magdyNo ratings yet
- 3 4W 8 12WP Math 5209Document17 pages3 4W 8 12WP Math 5209aye pyoneNo ratings yet
- Solutions Class Test1 2012Document4 pagesSolutions Class Test1 2012Amahle KononoNo ratings yet
- MTHS2007 Formula SheetwithtablescorrectedDocument3 pagesMTHS2007 Formula SheetwithtablescorrectedBenjamin OpokuNo ratings yet
- ParabolaDocument1 pageParabolaFATIN NOORNo ratings yet
- SolucionDocument10 pagesSolucionWaldidney TumiñaNo ratings yet
- MATH4030 Differential Geometry, 2017-18 Solutions To MidtermDocument5 pagesMATH4030 Differential Geometry, 2017-18 Solutions To MidtermErland GarciaNo ratings yet
- Universidade de Aveiro Departamento de Matem AticaDocument2 pagesUniversidade de Aveiro Departamento de Matem AticaPedro LopesNo ratings yet
- Steady-State Errors (202011)Document45 pagesSteady-State Errors (202011)Azlina RamliNo ratings yet
- LN 07Document7 pagesLN 07Keerthana Chandrasekar JeyanthiNo ratings yet
- MATH3968 Lecture 4: DR Emma Carberry 4 August 2009Document4 pagesMATH3968 Lecture 4: DR Emma Carberry 4 August 2009TOM DAVISNo ratings yet
- Riemann-Stieltjes Integrals with α a Step Function: t→s t>s t→s t<sDocument2 pagesRiemann-Stieltjes Integrals with α a Step Function: t→s t>s t→s t<sChristopher HitchensNo ratings yet
- Homework 9. Solutions. 1. Find Coordinate Basis Vectors, First Quadratic Form, Unit Normal Vector Field, Shape Operator and GaussianDocument8 pagesHomework 9. Solutions. 1. Find Coordinate Basis Vectors, First Quadratic Form, Unit Normal Vector Field, Shape Operator and GaussianKiprop VentureNo ratings yet
- Topics in analytic number theory, Lent 2013. Lecture 6: The Γ function, zerosDocument4 pagesTopics in analytic number theory, Lent 2013. Lecture 6: The Γ function, zerosEric ParkerNo ratings yet
- PHYS3051 Methods in Theoretical Physics I (2016-17) : XX Yy ZZDocument2 pagesPHYS3051 Methods in Theoretical Physics I (2016-17) : XX Yy ZZKwong DavidNo ratings yet
- Week-4 Session 2Document21 pagesWeek-4 Session 2Vinshi JainNo ratings yet
- Convergence of Q-Learning PDFDocument4 pagesConvergence of Q-Learning PDFRoyNo ratings yet
- Formulario 01Document2 pagesFormulario 01maurilio paiaoNo ratings yet
- SV22 Smith Chart ExamplesDocument9 pagesSV22 Smith Chart ExamplesAjayNo ratings yet
- 1022 Deep Inverse Reinforcement LeaDocument15 pages1022 Deep Inverse Reinforcement LeajhandervelbuxNo ratings yet
- SC617 EndtermDocument5 pagesSC617 EndtermHarshil NaikNo ratings yet
- Fismat Bab 6,7Document44 pagesFismat Bab 6,7Desima SimorangkirNo ratings yet
- Mini RotationDocument3 pagesMini RotationvanhoangbpNo ratings yet
- Solved Problems From GriffithsDocument4 pagesSolved Problems From GriffithsTushti PatelNo ratings yet
- Appendix A: Mathematical Derivations A.1 Jacobian TransformationsDocument3 pagesAppendix A: Mathematical Derivations A.1 Jacobian TransformationsriazgurguriNo ratings yet
- (Tables) Laplace and Z-Transforms PDFDocument7 pages(Tables) Laplace and Z-Transforms PDFCesar GilNo ratings yet
- Galois Solutions PDFDocument20 pagesGalois Solutions PDFlaxmi mahtoNo ratings yet
- Fuzzy Logic Control: Lect 5 Fuzzy Logic Control Basil Hamed Electrical Engineering Islamic University of GazaDocument96 pagesFuzzy Logic Control: Lect 5 Fuzzy Logic Control Basil Hamed Electrical Engineering Islamic University of GazaFLOWERNo ratings yet
- Epgp ML Ai 1706605342150Document27 pagesEpgp ML Ai 1706605342150Abhi SachdevNo ratings yet
- Lecture 9 - 10 Naive Generative AnalysisDocument54 pagesLecture 9 - 10 Naive Generative AnalysisSaikat DasNo ratings yet
- Week10 (Backprop and Competitive)Document63 pagesWeek10 (Backprop and Competitive)AhmedIsmaeilNo ratings yet
- Hand Written Digit RecognitionDocument5 pagesHand Written Digit RecognitionGowthami Reddy KovvuriNo ratings yet
- 18EI752Document1 page18EI752SAMPATH GOWDANo ratings yet
- Fikes 1971 - StripsDocument20 pagesFikes 1971 - StripsJuan PalomoNo ratings yet
- Lab 08Document14 pagesLab 08GhamdanNo ratings yet
- AITERM1 QPDocument3 pagesAITERM1 QPMadhavi MaremandaNo ratings yet
- Solutions To Practice Sheet: FL 1: Introduction To Soft ComputingDocument3 pagesSolutions To Practice Sheet: FL 1: Introduction To Soft ComputingEr Farzan UllahNo ratings yet
- 3 Getting Started With BigDLDocument54 pages3 Getting Started With BigDLRoque CaicedoNo ratings yet
- Communication and Language: The Impact of 20th Century TechnologyDocument5 pagesCommunication and Language: The Impact of 20th Century TechnologyKaryn N. Lewis100% (1)
- Control Systems: GATE Objective & Numerical Type SolutionsDocument26 pagesControl Systems: GATE Objective & Numerical Type SolutionsFlat Mate67% (3)
- Simplified Successive-Cancellation List Decoding of Polar CodesDocument22 pagesSimplified Successive-Cancellation List Decoding of Polar Codesnotcor nowNo ratings yet
- 2017CS10324 Amal Prasad SIV895 AssignmentDocument6 pages2017CS10324 Amal Prasad SIV895 AssignmentAmal PrasadNo ratings yet
- Instructions For How To Solve AssignmentDocument3 pagesInstructions For How To Solve AssignmentsachinNo ratings yet
- Metlit Swot-Ahp SPL 8Document38 pagesMetlit Swot-Ahp SPL 8Lukman Yudho 9440No ratings yet
- (2015) Einforcement Learning Approach To Learning Human Experience in Tuning Cavity FiltersDocument6 pages(2015) Einforcement Learning Approach To Learning Human Experience in Tuning Cavity FiltersAMINA AGHANIMNo ratings yet
- Oral Communication IntroductionDocument5 pagesOral Communication Introductiondumbest potetoNo ratings yet
- Handwriting Recognition System-A Review: Pooja Yadav Nidhika YadavDocument5 pagesHandwriting Recognition System-A Review: Pooja Yadav Nidhika YadavPrashanth SGNo ratings yet
- (Rehabilitation Engineering) Week 12 Assessment - Dina Andini - 5023201062Document3 pages(Rehabilitation Engineering) Week 12 Assessment - Dina Andini - 5023201062bringback happinesNo ratings yet
- Whitepaper KXDocument230 pagesWhitepaper KXVindhya MandekarNo ratings yet
- Sec#1 DDMDocument18 pagesSec#1 DDMSaad Mohamed SaadNo ratings yet
- Restaurant ReviewDocument21 pagesRestaurant ReviewPoojith GunukulaNo ratings yet
- Using Oracle Autonomous Database Serverless 61 70Document10 pagesUsing Oracle Autonomous Database Serverless 61 70hammadyazan16No ratings yet
- Sliding Mode Control For Second Order System PDFDocument9 pagesSliding Mode Control For Second Order System PDFMaroju Santosh KiranNo ratings yet
- From Adversarial Training To Geenerative Adversarial NetworksDocument12 pagesFrom Adversarial Training To Geenerative Adversarial NetworksBhbjnnNo ratings yet
- WEEK 2 Module 1 EM 3: Learning Outcome For PrelimDocument3 pagesWEEK 2 Module 1 EM 3: Learning Outcome For PrelimMei And PiocoNo ratings yet
- Machine Learning For Handwriting Recognition: Preetha S, Afrid I M, Karthik Hebbar P, Nishchay S KDocument9 pagesMachine Learning For Handwriting Recognition: Preetha S, Afrid I M, Karthik Hebbar P, Nishchay S KAustin Abhishek KispottaNo ratings yet