You might also like
- ETU 776 TripDocument1 pageETU 776 TripbhaskarinvuNo ratings yet
- 17 Subcon RequirementsDocument38 pages17 Subcon RequirementsMohammed MinhajNo ratings yet
- What Are Neural NetsDocument4 pagesWhat Are Neural NetsCVDSCRIBNo ratings yet
- Neural NetworksDocument22 pagesNeural NetworksHarshita GuptaNo ratings yet
- Standard Operating Procedure: Validation of Heating Ventilation and Air Conditioning (Hvac) SystemDocument20 pagesStandard Operating Procedure: Validation of Heating Ventilation and Air Conditioning (Hvac) SystemMaryanthony Namyalo100% (3)
- TLIA3907B - Receive and Store Stock - Learner GuideDocument42 pagesTLIA3907B - Receive and Store Stock - Learner Guideromerofred100% (4)
- Unit 4 - Site PlanningDocument22 pagesUnit 4 - Site PlanningvgdarchNo ratings yet
- Module 6 - Accounting Cycle 1 - Recording Business Transactions and Accounting For Service Entities - Part BDocument29 pagesModule 6 - Accounting Cycle 1 - Recording Business Transactions and Accounting For Service Entities - Part BAbelNo ratings yet
- Artificial Neural NetworksDocument14 pagesArtificial Neural NetworksprashantupadhyeNo ratings yet
- Adime Malnutrition and OncolgyDocument6 pagesAdime Malnutrition and Oncolgyapi-300587226100% (1)
- Fish Processing CGDocument41 pagesFish Processing CGmelisasumbilon100% (1)
- ADAB Member List Provides Contact Details for Development OrganizationsDocument8 pagesADAB Member List Provides Contact Details for Development OrganizationsShipon GhoshNo ratings yet
- Biological NeuronsDocument37 pagesBiological NeuronsCharles TaylorNo ratings yet
- HE - Food and Beverages CGDocument14 pagesHE - Food and Beverages CGJohn Leonard88% (8)
- G.R. No 198799, G.R. No. 229722, G.R. No. 189218Document2 pagesG.R. No 198799, G.R. No. 229722, G.R. No. 189218MACNo ratings yet
- Bio Inspired Computing: Fundamentals and Applications for Biological Inspiration in the Digital WorldFrom EverandBio Inspired Computing: Fundamentals and Applications for Biological Inspiration in the Digital WorldNo ratings yet
- Adaptive Neural Oscillator Using Continuous-Time Back-Propagation LearningDocument11 pagesAdaptive Neural Oscillator Using Continuous-Time Back-Propagation LearningSilvio SánchezNo ratings yet
- Varios Modelos de Neuronas (Abrir)Document9 pagesVarios Modelos de Neuronas (Abrir)ale_pumpNo ratings yet
- Sensing Neuron2000 PDFDocument6 pagesSensing Neuron2000 PDFBonitzuZTNo ratings yet
- Neuromorphic Photonics: Introduction to Spiking NeuronsDocument5 pagesNeuromorphic Photonics: Introduction to Spiking Neuronsrama chaudharyNo ratings yet
- In Ͳǀitro Eeural /nterfaceDocument26 pagesIn Ͳǀitro Eeural /nterfacePersonal growthNo ratings yet
- Segmentation and Edge Detection Based On Spiking Neural Network ModelDocument16 pagesSegmentation and Edge Detection Based On Spiking Neural Network ModelLàm Màu ChannelNo ratings yet
- INTRO Spiking Neural Networks An Introduction-VreekenDocument5 pagesINTRO Spiking Neural Networks An Introduction-VreekenZiom TygaNo ratings yet
- Group5 ProjectDocument CI 1081234315399613Document10 pagesGroup5 ProjectDocument CI 1081234315399613BellaNo ratings yet
- Intelligent Control System_4th_Control and MechatronicsDocument26 pagesIntelligent Control System_4th_Control and MechatronicsMustafa AlhumayreNo ratings yet
- Unit 1: 1. Introduction To Artificial Neural NetworkDocument17 pagesUnit 1: 1. Introduction To Artificial Neural Networkjai geraNo ratings yet
- Unit 3Document62 pagesUnit 3Rishika ShrivastavaNo ratings yet
- Neural BasicDocument6 pagesNeural BasicEdgar Maya PerezNo ratings yet
- T. Sreedevi E-Mail: Sreedu2002@yahoo - Co.in Iv Cse G.Pulla Reddy Engineering College, KurnoolDocument11 pagesT. Sreedevi E-Mail: Sreedu2002@yahoo - Co.in Iv Cse G.Pulla Reddy Engineering College, Kurnoolapi-26830587No ratings yet
- 2010 IEEE International Symposium On Circuits and Systems (ISCAS) - 2010Document4 pages2010 IEEE International Symposium On Circuits and Systems (ISCAS) - 2010Tioz1990No ratings yet
- Neurons With Graded Response Have Collective Computational Properties Like Those of Two-State NeuronsDocument6 pagesNeurons With Graded Response Have Collective Computational Properties Like Those of Two-State NeuronskivanaNo ratings yet
- 3citation PDFDocument19 pages3citation PDFMinalu BeyeneNo ratings yet
- NN Basics Tutorial 2004Document46 pagesNN Basics Tutorial 2004dunertoNo ratings yet
- Anjali Singhaniya (ML Internship)Document45 pagesAnjali Singhaniya (ML Internship)anjalisinha2103No ratings yet
- Neuromorphic ComputingDocument5 pagesNeuromorphic ComputingMayuri AnandikarNo ratings yet
- A Spiking Neuron Model of Head Direction Cells For Robot OrientationDocument9 pagesA Spiking Neuron Model of Head Direction Cells For Robot OrientationAnonymous HQuX2LUsDNo ratings yet
- Machine Learning 2Document51 pagesMachine Learning 2Girish Kumar NistalaNo ratings yet
- Artificial Intelligence in Robotics-21-50Document30 pagesArtificial Intelligence in Robotics-21-50Mustafa AlhumayreNo ratings yet
- ANN Unit 1 Ass PDFDocument11 pagesANN Unit 1 Ass PDFLalith NarenNo ratings yet
- Ann - Unit 1Document96 pagesAnn - Unit 1SASIKALA LNo ratings yet
- Early Cortical Orientation Selectivity: How Fast Shunting Inhibition Decodes The Order of Spike LatenciesDocument8 pagesEarly Cortical Orientation Selectivity: How Fast Shunting Inhibition Decodes The Order of Spike LatenciesarnodelormeNo ratings yet
- Learning in Neural Models With Complex Dynamics : Michael Stiber SegundoDocument4 pagesLearning in Neural Models With Complex Dynamics : Michael Stiber SegundoHilton SeheresNo ratings yet
- 1310 Colonia Nueva Tijuana, Tijuana, Baja California, México. C.P. 22435Document6 pages1310 Colonia Nueva Tijuana, Tijuana, Baja California, México. C.P. 22435Anonymous HUY0yRexYfNo ratings yet
- Artificial Intelligence Artificial Neural Networks - : IntroductionDocument43 pagesArtificial Intelligence Artificial Neural Networks - : IntroductionRawaz AzizNo ratings yet
- Minin HandoutDocument13 pagesMinin HandoutDimas Bagus Cahyaningrat. WNo ratings yet
- Impact of Network Activity On The Integrative PropDocument18 pagesImpact of Network Activity On The Integrative Propttqnhu.rhmNo ratings yet
- Neural network basicsDocument9 pagesNeural network basicsvarunNo ratings yet
- Artificial Neural Network Lecture 1Document9 pagesArtificial Neural Network Lecture 1Prince GodsplanNo ratings yet
- RapidDocument5 pagesRapidsandyNo ratings yet
- InTech-Introduction To The Artificial Neural Networks PDFDocument17 pagesInTech-Introduction To The Artificial Neural Networks PDFalexaalexNo ratings yet
- Artificial Neu: 27. Artificial Neural Network ModelsDocument18 pagesArtificial Neu: 27. Artificial Neural Network ModelsSomuNo ratings yet
- Soft Computing NotesDocument127 pagesSoft Computing Notesavinashabishek001No ratings yet
- Organic Transistors Mimicking Brain Behavior: K.Sai SameeraDocument6 pagesOrganic Transistors Mimicking Brain Behavior: K.Sai Sameeradba_123No ratings yet
- Neural NetworksDocument12 pagesNeural NetworksP PNo ratings yet
- Neural network-WPS OfficeDocument23 pagesNeural network-WPS OfficeMeti GudaNo ratings yet
- Neural Noise Induces The Evolution of Robust Behaviour by Avoiding Non-Functional BifurcationsDocument10 pagesNeural Noise Induces The Evolution of Robust Behaviour by Avoiding Non-Functional Bifurcationsjosef_151No ratings yet
- End Sem Report+ Final1 DocumentsDocument27 pagesEnd Sem Report+ Final1 Documentsসাতটি তারার তিমিরNo ratings yet
- 2018 A Novel and Fully Automatic Spike-Sorting Implementation With Variable Number of FeaturesDocument13 pages2018 A Novel and Fully Automatic Spike-Sorting Implementation With Variable Number of FeaturesAli RoustazadeNo ratings yet
- Kohonen 82 PDFDocument11 pagesKohonen 82 PDFA KNo ratings yet
- Kohonen Self-Organizing Maps: Is The Normalization Necessary?Document19 pagesKohonen Self-Organizing Maps: Is The Normalization Necessary?Ric KobaNo ratings yet
- Artificial Neural NetworksDocument12 pagesArtificial Neural NetworksBhargav Cho ChweetNo ratings yet
- Chapter 19Document15 pagesChapter 19Ara Martínez-OlguínNo ratings yet
- ANN, Fuzzy Logic and ANFIS Concepts ExplainedDocument18 pagesANN, Fuzzy Logic and ANFIS Concepts ExplainedTung DangNo ratings yet
- Tactile Texture Discrimination in The Robot-Rat PsikharpaxDocument8 pagesTactile Texture Discrimination in The Robot-Rat PsikharpaxFelixQuipotuitNo ratings yet
- Geisel WebDocument3 pagesGeisel WebAsif RazaNo ratings yet
- Neural Network Control of Wheelchairs Using Telemetric Head MovementDocument3 pagesNeural Network Control of Wheelchairs Using Telemetric Head MovementMariachiaraRicciNo ratings yet
- Artificial Neural Networks ExplainedDocument30 pagesArtificial Neural Networks ExplainedEng UlaNo ratings yet
- Artificial Intelligence (CSC4101) : - Introduction - Machine Learning and Optimization ModuleDocument28 pagesArtificial Intelligence (CSC4101) : - Introduction - Machine Learning and Optimization ModuleShayanUrRehmanSiddiquiNo ratings yet
- CH 9: Connectionist ModelsDocument35 pagesCH 9: Connectionist ModelsAMI CHARADAVANo ratings yet
- Long Short Term Memory: Fundamentals and Applications for Sequence PredictionFrom EverandLong Short Term Memory: Fundamentals and Applications for Sequence PredictionNo ratings yet
- Hybrid Neural Networks: Fundamentals and Applications for Interacting Biological Neural Networks with Artificial Neuronal ModelsFrom EverandHybrid Neural Networks: Fundamentals and Applications for Interacting Biological Neural Networks with Artificial Neuronal ModelsNo ratings yet
- Further Tests of Response - Outcome Associations in Differential-Outcome Matching-to-SampleDocument12 pagesFurther Tests of Response - Outcome Associations in Differential-Outcome Matching-to-SamplesdfoiuhjwerNo ratings yet
- Transfer Across Delayed Discriminations: II. Differences in The Substitutability of Initial Versus Test StimuliDocument13 pagesTransfer Across Delayed Discriminations: II. Differences in The Substitutability of Initial Versus Test StimulisdfoiuhjwerNo ratings yet
- A New Approach To Neural Cell Culture For Long-Term Studies: Steve M. Potter, Thomas B. DemarseDocument8 pagesA New Approach To Neural Cell Culture For Long-Term Studies: Steve M. Potter, Thomas B. DemarsesdfoiuhjwerNo ratings yet
- Journal of The Experimental Analysis of BehaviorDocument19 pagesJournal of The Experimental Analysis of BehaviorDharaArandaNo ratings yet
- Memor Y Processes in Delayed Spatial Discriminations: Response Intentions or Response Mediation?Document14 pagesMemor Y Processes in Delayed Spatial Discriminations: Response Intentions or Response Mediation?sdfoiuhjwerNo ratings yet
- 1999 DeMarseKilleeenBaker SatiationDocument17 pages1999 DeMarseKilleeenBaker SatiationsdfoiuhjwerNo ratings yet
- 13th Month Pay Law and JurisprudenceDocument2 pages13th Month Pay Law and JurisprudenceJennylyn Biltz AlbanoNo ratings yet
- Chapter 1 F&B ManagementDocument59 pagesChapter 1 F&B ManagementMohd Faizal Bin AyobNo ratings yet
- Solutions: Key Words and ConceptsDocument4 pagesSolutions: Key Words and ConceptsSamuel Enrique Cano PatocNo ratings yet
- Conscious Sedation Guidelines for DentistsDocument18 pagesConscious Sedation Guidelines for DentistsAnna NgNo ratings yet
- BurgerKing Versus McDonaldsDocument4 pagesBurgerKing Versus McDonaldsmarkus johannessenNo ratings yet
- Sea Cliff Zanzibar E Fact SheetDocument6 pagesSea Cliff Zanzibar E Fact SheetBenedict MuringakumweNo ratings yet
- BASF Puristar R3-12 - BF-9220 - PuriStar - R3-12 - PDS - Rev.2020-12 Spec SheetDocument2 pagesBASF Puristar R3-12 - BF-9220 - PuriStar - R3-12 - PDS - Rev.2020-12 Spec SheetAlNo ratings yet
- Parts of The CellDocument3 pagesParts of The Cellapi-308745623No ratings yet
- Ganesha PancharatnamDocument2 pagesGanesha PancharatnamrajiprakNo ratings yet
- Surgical Handpiece Maintenance PosterDocument2 pagesSurgical Handpiece Maintenance PosterHayes MaineNo ratings yet
- Ben T. Zinn Combustion LaboratoryDocument2 pagesBen T. Zinn Combustion LaboratoryLeslie WilliamsNo ratings yet
- Lucy Mayienga CV RecentDocument3 pagesLucy Mayienga CV Recentlucy.mayiengaNo ratings yet
- Xii Physical Education PracticalDocument3 pagesXii Physical Education PracticalAayush AdlakNo ratings yet
- Gesell's Maturational TheoryDocument4 pagesGesell's Maturational TheorysanghuNo ratings yet
- Format No. 1-2019-PSS-01 Rev.1Document1 pageFormat No. 1-2019-PSS-01 Rev.1nithinNo ratings yet
- Hydraulic Oil Hy-Gard Transmission John DeereDocument7 pagesHydraulic Oil Hy-Gard Transmission John DeereLuis Sanchez LlicoNo ratings yet
- Journal Review - Philosophical and Contextual Issue in Nursing Theory DevelopmentDocument4 pagesJournal Review - Philosophical and Contextual Issue in Nursing Theory DevelopmentJULIE ANN PARANo ratings yet
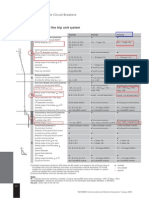
- B2 LVDOCTOBER2007 SMDocument148 pagesB2 LVDOCTOBER2007 SMjason640100% (2)
- Joshua Gonzalez - ResumeDocument2 pagesJoshua Gonzalez - Resumeapi-483760707No ratings yet