You might also like
- ECE 3054: Signals, Systems, and Transforms Lab Manual: I. Selesnick NYU TandonDocument41 pagesECE 3054: Signals, Systems, and Transforms Lab Manual: I. Selesnick NYU TandonilupfudNo ratings yet
- Modern Control System TutorialDocument134 pagesModern Control System TutorialUtn LeoNo ratings yet
- EE-232 Lab Manual Signals and SystemsDocument57 pagesEE-232 Lab Manual Signals and SystemsMuhammad YousafNo ratings yet
- Lab Manual (PROGRAMMING!!)Document57 pagesLab Manual (PROGRAMMING!!)Zulfiqar MemonNo ratings yet
- Procedure: 1. Introduction To MatlabDocument6 pagesProcedure: 1. Introduction To MatlabAli ShanNo ratings yet
- Software Toolkit: MATLABDocument15 pagesSoftware Toolkit: MATLABViha NaikNo ratings yet
- Introduction To Matlab& Signals: Defining A ScalarDocument10 pagesIntroduction To Matlab& Signals: Defining A ScalarMuhammadAxadKhataabGujjarNo ratings yet
- MATLAB by Examples: BookDocument9 pagesMATLAB by Examples: BookgkrabhishekNo ratings yet
- Feedback Control Systems Lab ManualDocument141 pagesFeedback Control Systems Lab Manualanum_sadaf0% (1)
- Introduction To Matlab & Signals: ObjectiveDocument7 pagesIntroduction To Matlab & Signals: Objectiveعمیر بن اصغرNo ratings yet
- Help Help Help Diary Diary Help Help DemoDocument2 pagesHelp Help Help Diary Diary Help Help DemoEmad Suliman AbusittaNo ratings yet
- MATLAB Structure and Use: 1.1 Pre-Lab AssignmentDocument29 pagesMATLAB Structure and Use: 1.1 Pre-Lab AssignmentYu YangNo ratings yet
- Lab # 1Document11 pagesLab # 1Aaron SamsonNo ratings yet
- ECE2026 Lab00 2015FDocument6 pagesECE2026 Lab00 2015FOmnipotentEntityNo ratings yet
- Lab Experiment 1: Introduction To MATLAB ObjectivesDocument3 pagesLab Experiment 1: Introduction To MATLAB ObjectivesPaula Camille PalinoNo ratings yet
- MATLAB Basic Commands PDFDocument30 pagesMATLAB Basic Commands PDFrathnam.pmNo ratings yet
- Matlab Review PDFDocument19 pagesMatlab Review PDFMian HusnainNo ratings yet
- Lab Report MatlabDocument43 pagesLab Report MatlabRana Hamza Muhammad YousafNo ratings yet
- Lab 1Document6 pagesLab 1saba rasheedNo ratings yet
- Project Signal System 2012Document17 pagesProject Signal System 2012Kurniawan Banumaxs NagaNo ratings yet
- Lab 1 Sns USMAN JADOONDocument9 pagesLab 1 Sns USMAN JADOONUsman jadoonNo ratings yet
- Lab01 Introduction To MatlabDocument7 pagesLab01 Introduction To MatlabSeyed SadeghNo ratings yet
- DSP Lab ManualDocument132 pagesDSP Lab ManualShahab JavedNo ratings yet
- Programming With MATLAB: Clodomiro Ferreira Aleksei Netsunajev EUIDocument57 pagesProgramming With MATLAB: Clodomiro Ferreira Aleksei Netsunajev EUIMuhammad AsrofiNo ratings yet
- DSP Lab ManualDocument57 pagesDSP Lab ManualRabia SamadNo ratings yet
- MatlabSession1 PHAS2441Document5 pagesMatlabSession1 PHAS2441godkid308No ratings yet
- Lab 4Document8 pagesLab 4hamzaNo ratings yet
- THL - 1 - Ece 4600Document21 pagesTHL - 1 - Ece 4600Juju JantonNo ratings yet
- Lab 01Document8 pagesLab 01ALISHBA AZAMNo ratings yet
- Matlab File - Deepak - Yadav - Bca - 4TH - Sem - A50504819015Document59 pagesMatlab File - Deepak - Yadav - Bca - 4TH - Sem - A50504819015its me Deepak yadavNo ratings yet
- Lab 2Document11 pagesLab 2yohanNo ratings yet
- DSP Lab Manual 2023Document85 pagesDSP Lab Manual 2023tanujsingal945No ratings yet
- Lab1 DSPDocument15 pagesLab1 DSPAli HassanNo ratings yet
- Lab 1-Introduction To MatlabDocument8 pagesLab 1-Introduction To MatlabBatool HerzallahNo ratings yet
- 1 Pre-Lab: ELEC2201 Signals & Linear Systems MDocument7 pages1 Pre-Lab: ELEC2201 Signals & Linear Systems MPhilip SalmonyNo ratings yet
- Solution For DSP LabDocument5 pagesSolution For DSP LabVN TranNo ratings yet
- Assignment 4Document4 pagesAssignment 4Muhammad Usman SaeedNo ratings yet
- EE 105: MATLAB As An Engineer's Problem Solving ToolDocument3 pagesEE 105: MATLAB As An Engineer's Problem Solving Toolthinkberry22No ratings yet
- Cours Traitement Signal P1Document28 pagesCours Traitement Signal P1anastirNo ratings yet
- Matlab Basics Tutorial: VectorsDocument52 pagesMatlab Basics Tutorial: VectorsMohit Bathla MontyNo ratings yet
- Signal LAb1Document6 pagesSignal LAb1Nguyen Trung KhanhNo ratings yet
- Experiment 1Document39 pagesExperiment 1Usama NadeemNo ratings yet
- Dspaceinsimulink PDFDocument20 pagesDspaceinsimulink PDFmphaniteja2012No ratings yet
- Lab1FA11 PDFDocument11 pagesLab1FA11 PDFaxecaleverNo ratings yet
- Lab 3Document8 pagesLab 3Jafar HussainNo ratings yet
- LAB-01 EE-311 Signal and Systems PDFDocument12 pagesLAB-01 EE-311 Signal and Systems PDFAwais AliNo ratings yet
- Lab 2Document14 pagesLab 2Tahsin Zaman TalhaNo ratings yet
- Mat Labs I Mu Link IntroDocument14 pagesMat Labs I Mu Link Intros.b.v.seshagiri1407No ratings yet
- Matlab Tutorial PDFDocument12 pagesMatlab Tutorial PDFm6muthiNo ratings yet
- Introduction To MATLAB: Experiment IDocument4 pagesIntroduction To MATLAB: Experiment IArikJuniarNo ratings yet
- Image ProcessingDocument36 pagesImage ProcessingTapasRoutNo ratings yet
- Lab2 SignalsDocument4 pagesLab2 SignalsMelih AtaseverNo ratings yet
- TEE 451 - Control SystemsDocument4 pagesTEE 451 - Control SystemsVu LeNo ratings yet
- Lecture 13 Matlab Octave FreeMat pt1Document30 pagesLecture 13 Matlab Octave FreeMat pt1navinarsNo ratings yet
- Lab 01 ADocument7 pagesLab 01 ApathmakerpkNo ratings yet
- Lecture1 MatlabDocument55 pagesLecture1 Matlabapi-3824811No ratings yet
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- 00numbersystems 130119065930 Phpapp01Document62 pages00numbersystems 130119065930 Phpapp01Anonymous eWMnRr70qNo ratings yet
- RehuyDocument32 pagesRehuyAnonymous eWMnRr70qNo ratings yet
- Lec 09 111Document246 pagesLec 09 111Anonymous eWMnRr70qNo ratings yet
- Boolean LawsDocument9 pagesBoolean LawsAnonymous eWMnRr70qNo ratings yet
- Update3 160317004923Document19 pagesUpdate3 160317004923Anonymous eWMnRr70qNo ratings yet
- 111111111111Document24 pages111111111111Anonymous eWMnRr70qNo ratings yet
- Fed Question BankDocument5 pagesFed Question BankAnonymous eWMnRr70qNo ratings yet
- BoolDocument33 pagesBoolAnonymous eWMnRr70qNo ratings yet
- Basicnumbersystem 160226110240Document25 pagesBasicnumbersystem 160226110240Anonymous eWMnRr70q100% (1)
- Vlsi Technology Kec 053 1Document2 pagesVlsi Technology Kec 053 1Anonymous eWMnRr70qNo ratings yet
- 3aquine Mccluskeymethod 191016140548Document33 pages3aquine Mccluskeymethod 191016140548Anonymous eWMnRr70qNo ratings yet
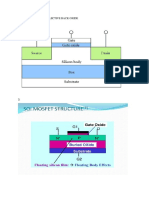
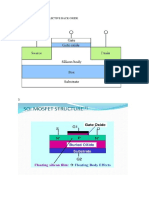
- 1.soi Mosfet Using Selective Back OxideDocument5 pages1.soi Mosfet Using Selective Back OxideAnonymous eWMnRr70qNo ratings yet
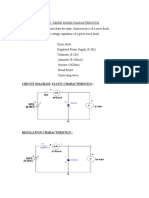
- AIM: - A) To Observe and Draw The Static Characteristics of A Zener DiodeDocument3 pagesAIM: - A) To Observe and Draw The Static Characteristics of A Zener DiodeAnonymous eWMnRr70qNo ratings yet
- Advantages of Class B Push Pull Amplifier Over Class ADocument4 pagesAdvantages of Class B Push Pull Amplifier Over Class AAnonymous eWMnRr70qNo ratings yet
- Vlsi Technology Kec 053Document1 pageVlsi Technology Kec 053Anonymous eWMnRr70qNo ratings yet
- Unit 5 FABRICATION OF DEVICESDocument28 pagesUnit 5 FABRICATION OF DEVICESAnonymous eWMnRr70qNo ratings yet
- TECHNICAL QUIZ EceDocument7 pagesTECHNICAL QUIZ EceAnonymous eWMnRr70qNo ratings yet
- (A) Structure SpecificationDocument2 pages(A) Structure SpecificationAnonymous eWMnRr70qNo ratings yet
- Fed Previous Questions and Answers PDFDocument60 pagesFed Previous Questions and Answers PDFAnonymous eWMnRr70qNo ratings yet
- RM2Document102 pagesRM2Anonymous eWMnRr70qNo ratings yet
- Field Effect TransistorsDocument15 pagesField Effect TransistorsAnonymous eWMnRr70qNo ratings yet
- Temp Dependance of SemiconductorDocument3 pagesTemp Dependance of SemiconductorAnonymous eWMnRr70qNo ratings yet
- Diode ApplicationsDocument22 pagesDiode ApplicationsAnonymous eWMnRr70qNo ratings yet
- Fuzzy Calculus & Possibility Theory1Document1 pageFuzzy Calculus & Possibility Theory1Anonymous eWMnRr70qNo ratings yet
- RegressionDocument24 pagesRegressionAnonymous eWMnRr70q100% (1)
- High K DielectricDocument9 pagesHigh K DielectricAnonymous eWMnRr70qNo ratings yet
- 1.soi Mosfet Using Selective Back OxideDocument5 pages1.soi Mosfet Using Selective Back OxideAnonymous eWMnRr70qNo ratings yet
- Analog Performance of Double Gate Junctionless Tunnel Field Effect TransistorDocument6 pagesAnalog Performance of Double Gate Junctionless Tunnel Field Effect TransistorAnonymous eWMnRr70qNo ratings yet
- Athena Users1 PDFDocument436 pagesAthena Users1 PDFAnonymous eWMnRr70qNo ratings yet
- Mosfet AtlasDocument2 pagesMosfet AtlasAnonymous eWMnRr70qNo ratings yet
- ICA ManualDocument88 pagesICA Manualkrishna goggiNo ratings yet
- CchelpDocument119 pagesCchelpLaco tangara JhuniorNo ratings yet
- Digital Signal Processing Laboratory: Sri Ramakrishna Engineering CollegeDocument48 pagesDigital Signal Processing Laboratory: Sri Ramakrishna Engineering CollegeABISHEK R EIENo ratings yet
- Digital Image Processing - Lecture Weeks 21 and 22Document55 pagesDigital Image Processing - Lecture Weeks 21 and 22Jorma KekalainenNo ratings yet
- PAM, PPM, PWM Modulation and Demodulation Trainer ST2110 LearningDocument67 pagesPAM, PPM, PWM Modulation and Demodulation Trainer ST2110 Learningchemavalencia100% (2)
- A Procedure To Develop Elevation-Area-Capacity Curves of Reservoirs From Depth Sounding SurveysDocument5 pagesA Procedure To Develop Elevation-Area-Capacity Curves of Reservoirs From Depth Sounding SurveysDragomirescu AndreiNo ratings yet
- Filter Design Report: Electrical BOMDocument7 pagesFilter Design Report: Electrical BOMWesley de PaulaNo ratings yet
- FIR & IIR Filters DesignDocument12 pagesFIR & IIR Filters DesignPreeti KatiyarNo ratings yet
- Digital Signal Processing Mid Term Examination Sub Code:-Etec 306 Time: 1Hr Max Marks:30Document5 pagesDigital Signal Processing Mid Term Examination Sub Code:-Etec 306 Time: 1Hr Max Marks:30SanjeevNo ratings yet
- 10 19uecpc505 A 5 36assignment-2 DSP-STDocument4 pages10 19uecpc505 A 5 36assignment-2 DSP-STATHIYAMAN MNo ratings yet
- Z Score Technical DetailsDocument18 pagesZ Score Technical DetailsgabbyNo ratings yet
- IIR FilterDocument50 pagesIIR FilterWan Ting100% (1)
- MAX9867Document55 pagesMAX9867megatornadoNo ratings yet
- Active Filter (Slide)Document24 pagesActive Filter (Slide)ASD DSANo ratings yet
- 4 CSE 447 Digital FilterDocument82 pages4 CSE 447 Digital FilterAriful Islam ShantoNo ratings yet
- IIR FilterDocument26 pagesIIR FilterKyax Ginaheeq100% (1)
- Digital Image ProcessingDocument94 pagesDigital Image Processinggirithik14No ratings yet
- Frequency Domain Filtering Image ProcessingDocument24 pagesFrequency Domain Filtering Image ProcessingSankalp_Kallakur_402100% (1)
- Design of Stagger-Tuned Amplifiers: Appendix HDocument5 pagesDesign of Stagger-Tuned Amplifiers: Appendix H黃啟倫No ratings yet
- Model 483C41 Eight-Channel ICP®/Voltage/Charge Sensor Signal Conditioner Installation and Operating ManualDocument41 pagesModel 483C41 Eight-Channel ICP®/Voltage/Charge Sensor Signal Conditioner Installation and Operating ManualTecnologia BinariaNo ratings yet
- Network Analysis and Synthesis. WinbergDocument120 pagesNetwork Analysis and Synthesis. Winbergfernando6867No ratings yet
- Cheb YshevDocument23 pagesCheb YshevDr Jobin ChristNo ratings yet
- Analysis, Design and Characteristics of Op-Amp & Second Order FilterDocument9 pagesAnalysis, Design and Characteristics of Op-Amp & Second Order FilterManraj GujralNo ratings yet
- Design of IIR Filters: Difference Method, and The Bilinear Z-TransformDocument13 pagesDesign of IIR Filters: Difference Method, and The Bilinear Z-TransformKUHENDRAN A/L RAVANDRANNo ratings yet
- Communication CircuitsDocument37 pagesCommunication CircuitsDenzel Ivan PalatinoNo ratings yet
- Prepared by Dr. Samsul Haimi Dahlan Emc/Fkee/UthmDocument193 pagesPrepared by Dr. Samsul Haimi Dahlan Emc/Fkee/UthmDanielNo ratings yet
- DSPDocument3 pagesDSPniladridey12345No ratings yet
- SAECGDocument16 pagesSAECGSaad Al HelyNo ratings yet
- Phase Relations in Active Filters PDFDocument5 pagesPhase Relations in Active Filters PDFbiswajitntpcNo ratings yet
- Section 3H Filters PackageDocument45 pagesSection 3H Filters PackagealfredomatiasrojoNo ratings yet