You might also like
- 2 Marks Question & AnswerDocument9 pages2 Marks Question & AnswerShanmuga PriyaNo ratings yet
- Tohatsu 2 Stroke Service Manual 1992 2000Document329 pagesTohatsu 2 Stroke Service Manual 1992 2000Adi Peterfi97% (38)
- Comparative ratings of heavy duty cablesDocument1 pageComparative ratings of heavy duty cablesshivani76% (25)
- 2012-1811. Robot Arm Kinematics DH IntroDocument75 pages2012-1811. Robot Arm Kinematics DH IntroRana UsmanNo ratings yet
- Nfrc100a 2010Document49 pagesNfrc100a 2010Amy ShepardNo ratings yet
- Candidate Workshop ManualDocument45 pagesCandidate Workshop ManualMark Brewer100% (1)
- Kinematic Modelling of RobotsDocument36 pagesKinematic Modelling of Robotsusmanali17No ratings yet
- Lecture 2 - (Robotic Control)Document39 pagesLecture 2 - (Robotic Control)ShamaNo ratings yet
- Crane Company Within SingaporeDocument4 pagesCrane Company Within SingaporeRash AcidNo ratings yet
- Robot ArchitecturesDocument72 pagesRobot ArchitecturesHODCIVILNo ratings yet
- Introduction To Robotics: Amitabha MukerjeeDocument54 pagesIntroduction To Robotics: Amitabha MukerjeeVaibhav SharmaNo ratings yet
- Robotics: R&N: CH 25 R&N: CH 25Document18 pagesRobotics: R&N: CH 25 R&N: CH 25neel_longingNo ratings yet
- Slides Set 1-2Document38 pagesSlides Set 1-2bianca lascaracheNo ratings yet
- Modeling of A Hexapod Robot Kinematic Equivalence To A UnicycleDocument8 pagesModeling of A Hexapod Robot Kinematic Equivalence To A UnicycleChinh Hoang QuangNo ratings yet
- Mobile Robot Path Tracking LabDocument6 pagesMobile Robot Path Tracking LabOK BrosNo ratings yet
- SeminarDocument23 pagesSeminarBraja Gopal PatraNo ratings yet
- Module 01 - IntroductionDocument37 pagesModule 01 - Introductionneelesh2k5No ratings yet
- Humanoids 2017Document6 pagesHumanoids 2017MARIO RICARDO ARBULU SAAVEDRANo ratings yet
- 1 Differential Drive KinematicsDocument8 pages1 Differential Drive Kinematicsindo spiceNo ratings yet
- Zhao 2009Document6 pagesZhao 2009AriNo ratings yet
- IDRP on Robotics and Mobility Systems AssignmentDocument3 pagesIDRP on Robotics and Mobility Systems AssignmentArbaz KhanNo ratings yet
- Reference Trajectory Tracking For A multi-DOF Robot Arm: 10.1515/acsc-2015-0033Document15 pagesReference Trajectory Tracking For A multi-DOF Robot Arm: 10.1515/acsc-2015-0033Zafer GökNo ratings yet
- Advanced Techniques of Industrial Robot Programming 79Document21 pagesAdvanced Techniques of Industrial Robot Programming 79Pablo HernandezNo ratings yet
- Kinematic Models and ConstraintsDocument43 pagesKinematic Models and Constraintsanitha_eswaranNo ratings yet
- Advances in Robotics: Understanding Robot PoseDocument78 pagesAdvances in Robotics: Understanding Robot PoseAkashNo ratings yet
- Human Arm Imitation by A 7 DOF Serial MaDocument5 pagesHuman Arm Imitation by A 7 DOF Serial MaPrateek Kumar PandeyNo ratings yet
- EGN 3060c: Introduction To Robotics: Background To Planning Planning As SearchDocument47 pagesEGN 3060c: Introduction To Robotics: Background To Planning Planning As SearchManny HdezNo ratings yet
- Robot PDFDocument56 pagesRobot PDFfranklin getialNo ratings yet
- lecture1_2019Document27 pageslecture1_2019JuliusNo ratings yet
- MEAM 620 – Part II Introduction to Motion PlanningDocument41 pagesMEAM 620 – Part II Introduction to Motion PlanningSamuel MedawarNo ratings yet
- Direct Kinematics: Robotics 1Document33 pagesDirect Kinematics: Robotics 1Jorge Ballesteros CaceresNo ratings yet
- Direct Kinematic Modeling of 6R Robot Using Robotics ToolboxDocument4 pagesDirect Kinematic Modeling of 6R Robot Using Robotics ToolboxNedim BabicNo ratings yet
- MFET 445 Robots & Automation Coordinate SystemsDocument66 pagesMFET 445 Robots & Automation Coordinate SystemsAswath SridharNo ratings yet
- Direct Kinematics: Robotics 1Document31 pagesDirect Kinematics: Robotics 1VictorHernandezNo ratings yet
- Mpb-Icra2006 (Wazhua - Com)Document3 pagesMpb-Icra2006 (Wazhua - Com)Joel Shelton LasradoNo ratings yet
- 09 DirectKinematics PDFDocument31 pages09 DirectKinematics PDFSi Mohamed RahiliNo ratings yet
- Robotics: Trajectory Planning and Tracking Control of A Differential-Drive Mobile Robot in A Picture Drawing ApplicationDocument15 pagesRobotics: Trajectory Planning and Tracking Control of A Differential-Drive Mobile Robot in A Picture Drawing ApplicationMinh CaoNo ratings yet
- The 3d Linear Inverted Pendulum Mode A Simple Modeling For A BipDocument8 pagesThe 3d Linear Inverted Pendulum Mode A Simple Modeling For A BipDr.SUNI MARY VARGHESENo ratings yet
- Robotics MotionDocument29 pagesRobotics MotionfenixnomahotmailcomNo ratings yet
- 02 - Position Analysis of Serial ManipulatorsDocument5 pages02 - Position Analysis of Serial Manipulatorsadissu K/MNo ratings yet
- MobkinDocument8 pagesMobkinYousef MohammedNo ratings yet
- Modeling & Simulation of Spherical Robot Configuration Using Solidworks & MatlabDocument3 pagesModeling & Simulation of Spherical Robot Configuration Using Solidworks & Matlabkarthi0% (1)
- Project Report Introduction To Autonomous Mobile Robots MCG 5138HDocument9 pagesProject Report Introduction To Autonomous Mobile Robots MCG 5138HFalky RabbNo ratings yet
- Robótica: IntroducciónDocument34 pagesRobótica: IntroducciónFritzDeepNo ratings yet
- 2012-1811. Robot Arm Kinematics DH IntroDocument75 pages2012-1811. Robot Arm Kinematics DH IntroG30nyNo ratings yet
- Autonomous Mobile Robot Navigation Algorithm For Planning Collision-Free Path Designed in Dynamic EnvironmentsDocument6 pagesAutonomous Mobile Robot Navigation Algorithm For Planning Collision-Free Path Designed in Dynamic EnvironmentskishorevennelaNo ratings yet
- Robotics 1 Trajectory PlanningDocument30 pagesRobotics 1 Trajectory PlanningKOTIKA SOMA RAJUNo ratings yet
- CLASE 5 ARQ ROB A2023Document32 pagesCLASE 5 ARQ ROB A2023hugo barrientos floresNo ratings yet
- Lab3 7Document5 pagesLab3 7sendkushNo ratings yet
- Icra09 TaskSpaceTrajectoriesCubicSplineOptimizationDocument8 pagesIcra09 TaskSpaceTrajectoriesCubicSplineOptimizationsigmateNo ratings yet
- EE631 Cooperating Autonomous Mobile Robots: Lecture 5: Collision Avoidance in Dynamic EnvironmentsDocument22 pagesEE631 Cooperating Autonomous Mobile Robots: Lecture 5: Collision Avoidance in Dynamic EnvironmentsLe Dinh PhongNo ratings yet
- EE381 Lec1 Week5Document55 pagesEE381 Lec1 Week5Fatima IqbalNo ratings yet
- Manipulators: Degrees of FreedomDocument5 pagesManipulators: Degrees of Freedomapi-19801502No ratings yet
- Cad 18Document30 pagesCad 18Priyakrishnan SenthilNo ratings yet
- EECS4421Z: Introduction To Robotics Sample Exam QuestionsDocument4 pagesEECS4421Z: Introduction To Robotics Sample Exam QuestionsMooeez BellaamineNo ratings yet
- 090 Robot Trajectory Generation enDocument50 pages090 Robot Trajectory Generation enbaboiu electricNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument23 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsNaida DacicNo ratings yet
- Space Simulation Lab ManualDocument55 pagesSpace Simulation Lab ManualBhanuNo ratings yet
- Chapter 2 - Robot KinematicsDocument35 pagesChapter 2 - Robot KinematicsShitnu SuwanNo ratings yet
- Sheet1 - Root Locus Techniques PDFDocument6 pagesSheet1 - Root Locus Techniques PDFABDELRHMAN ALINo ratings yet
- EE631 Cooperating Autonomous Mobile Robots: Lecture 5: Collision Avoidance in Dynamic EnvironmentsDocument22 pagesEE631 Cooperating Autonomous Mobile Robots: Lecture 5: Collision Avoidance in Dynamic EnvironmentsBedreddin KarakuşNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- W2A1Document6 pagesW2A1Suren EzNo ratings yet
- Uribapplicationform 74446631 PDFDocument1 pageUribapplicationform 74446631 PDFzaheedhusainNo ratings yet
- Advanced CalculusDocument592 pagesAdvanced Calculusjosemarcelod7088No ratings yet
- 02 Math Essentials FileDocument55 pages02 Math Essentials FileHemaNathNo ratings yet
- Nursery Price List - Spring ShadehousesDocument2 pagesNursery Price List - Spring ShadehousesRahul RahuNo ratings yet
- Chapter 4 1 Indefinite IntegralDocument21 pagesChapter 4 1 Indefinite IntegralMinh Huỳnh LêNo ratings yet
- 2018 General Education Reviewer Part 10 - 50 Questions With Answers - LET EXAM - Questions & AnswersDocument10 pages2018 General Education Reviewer Part 10 - 50 Questions With Answers - LET EXAM - Questions & AnswersScribdNo ratings yet
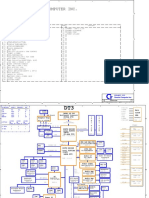
- Acer Aspire 1710 (Quanta DT3) PDFDocument35 pagesAcer Aspire 1710 (Quanta DT3) PDFMustafa AkanNo ratings yet
- SFRM Commissioning and Field Testing - Structural Fire Resistance Content From Fire Protection EngineeringDocument6 pagesSFRM Commissioning and Field Testing - Structural Fire Resistance Content From Fire Protection EngineeringRichard HollidayNo ratings yet
- Chapter Arithmetic and Geometric Progressions 024005Document14 pagesChapter Arithmetic and Geometric Progressions 024005ravichandran_brNo ratings yet
- ESDIS05161 DMP For DPs Template PDFDocument15 pagesESDIS05161 DMP For DPs Template PDFneerajshukla246829No ratings yet
- Revison 5 - Adverbs of TimeDocument50 pagesRevison 5 - Adverbs of Timeluis fernandoNo ratings yet
- Katalog Ag-700 To Ag-800Document1 pageKatalog Ag-700 To Ag-800Iqbal AbugindaNo ratings yet
- CAD32M7 Data SheetDocument2 pagesCAD32M7 Data SheetMehmet EngürNo ratings yet
- Bharat Gaurav Deluxe AC tourist train to showcase Gujarat's cultureDocument146 pagesBharat Gaurav Deluxe AC tourist train to showcase Gujarat's culturesandeep kumarNo ratings yet
- X20 System-ENG - V3.50 PDFDocument3,410 pagesX20 System-ENG - V3.50 PDFAbdelrahmanJamal100% (1)
- Analysis of Wood Bending PropertiesDocument11 pagesAnalysis of Wood Bending Propertiesprasanna020391100% (1)
- The Nigerian Marketing System Its Development - Problems and ProspectsDocument8 pagesThe Nigerian Marketing System Its Development - Problems and ProspectsNwakor Maco Sochi100% (1)
- Technical Card: Information OnlyDocument1 pageTechnical Card: Information OnlyBhuvnesh VermaNo ratings yet
- Laboratory Exercise Set #10 Printers General Instructions:: Lab 11.1 Backing Up An Ios Device To A PC or Mac Using ItunesDocument29 pagesLaboratory Exercise Set #10 Printers General Instructions:: Lab 11.1 Backing Up An Ios Device To A PC or Mac Using ItunesSam MadroneroNo ratings yet
- Lean-burn gas generator sets technical specificationsDocument2 pagesLean-burn gas generator sets technical specificationsHector IuspaNo ratings yet
- Monika Soni PDFDocument16 pagesMonika Soni PDFdeepak guptaNo ratings yet
- Fibre OpticDocument16 pagesFibre OpticJoanna BaileyNo ratings yet
- Geotechnical Scope of Work For ERL Unit-2Document75 pagesGeotechnical Scope of Work For ERL Unit-2smjohirNo ratings yet
- Classical Mechanics Lecture 2 VectorsDocument14 pagesClassical Mechanics Lecture 2 VectorsDiego ForeroNo ratings yet
- OSHCo Study I MalaysiaDocument7 pagesOSHCo Study I MalaysiafairusNo ratings yet
- Organization Management and LeadershipDocument26 pagesOrganization Management and LeadershipOtilia BadeaNo ratings yet
- Unit II - MCMTDocument50 pagesUnit II - MCMTSai RamNo ratings yet
- LCD LG (M17,1917S-BNN E)Document34 pagesLCD LG (M17,1917S-BNN E)Ion IonutNo ratings yet