You might also like
- Rohini 74684926776Document24 pagesRohini 74684926776gynoceNo ratings yet
- CSC580 Quick Notes Lect1and2Document18 pagesCSC580 Quick Notes Lect1and2Muhammad IkhmalNo ratings yet
- Faculty of Engineering: ECE 4240 - Microprocessor InterfacingDocument3 pagesFaculty of Engineering: ECE 4240 - Microprocessor InterfacingDheereshNo ratings yet
- CSE4001: Parallel and Distributed Computing FundamentalsDocument63 pagesCSE4001: Parallel and Distributed Computing FundamentalsANTHONY NIKHIL REDDYNo ratings yet
- Basics of Parallel Programming: Unit-1Document79 pagesBasics of Parallel Programming: Unit-1jai shree krishnaNo ratings yet
- Parallel Computer Models: CSE7002: Advanced Computer ArchitectureDocument37 pagesParallel Computer Models: CSE7002: Advanced Computer ArchitectureAbhishek singhNo ratings yet
- AmmuDocument17 pagesAmmualphiyaktom05No ratings yet
- CC unit 1Document24 pagesCC unit 1hawih58680No ratings yet
- Parallel Processing Topic OverviewDocument18 pagesParallel Processing Topic OverviewwmanjonjoNo ratings yet
- 5 Underlying Principles of Distributed - SoftwareDocument32 pages5 Underlying Principles of Distributed - Softwareselvajoe821No ratings yet
- Lecture 1 Introduction To PDCDocument17 pagesLecture 1 Introduction To PDCnimranoor137No ratings yet
- Introduction To Parallel ProcessingDocument47 pagesIntroduction To Parallel ProcessingMilindNo ratings yet
- Term Paper Cse 211Document20 pagesTerm Paper Cse 211Nancy GoyalNo ratings yet
- Aca Mod1Document125 pagesAca Mod1SadiaNo ratings yet
- ACA Notes Diginotes PDFDocument283 pagesACA Notes Diginotes PDFPrakhyath JainNo ratings yet
- Cloud Computing FundamentalsDocument31 pagesCloud Computing FundamentalsvizierNo ratings yet
- Opensees User Workshop 2003: P E E RDocument9 pagesOpensees User Workshop 2003: P E E RRian IbayanNo ratings yet
- The New Trends of Parallel ProcessingDocument5 pagesThe New Trends of Parallel ProcessingMohamed EL-FayomyNo ratings yet
- L1 IntroductionDocument12 pagesL1 IntroductionKarthik LaxmikanthNo ratings yet
- CH 1 Intro To Parallel ArchitectureDocument18 pagesCH 1 Intro To Parallel Architecturedigvijay dholeNo ratings yet
- 02 - Lecture #2Document29 pages02 - Lecture #2Fatma mansourNo ratings yet
- Lecture 1Document23 pagesLecture 1Lets clear Jee mathsNo ratings yet
- Areas in CSDocument21 pagesAreas in CSUday KumarNo ratings yet
- Comarch NewtemplateDocument3 pagesComarch NewtemplateVanie PascualNo ratings yet
- Lec 1Document21 pagesLec 1pritam044No ratings yet
- Al-Azhar University SCE 409 Computer ArchitectureDocument52 pagesAl-Azhar University SCE 409 Computer ArchitectureMohamed HelmyNo ratings yet
- Introduction and Course Outline: Advanced Operating Systems (M)Document21 pagesIntroduction and Course Outline: Advanced Operating Systems (M)Lokesh SharmaNo ratings yet
- Pendahuluan Paralel KomputerDocument167 pagesPendahuluan Paralel KomputerBudi SetiawanNo ratings yet
- 1.1.4 System Attributes To PerformanceDocument9 pages1.1.4 System Attributes To PerformanceVikram ShirolNo ratings yet
- Introduction To Parallel Computing LLNLDocument44 pagesIntroduction To Parallel Computing LLNLAntônio ArapiracaNo ratings yet
- HWSW Co Design Unit-1notesDocument195 pagesHWSW Co Design Unit-1notesswapna revuriNo ratings yet
- Data Parallel ArchitectureDocument17 pagesData Parallel ArchitectureSachin Kumar BassiNo ratings yet
- Research Paper Computer Architecture PDFDocument8 pagesResearch Paper Computer Architecture PDFcammtpw6100% (1)
- Application of Computer in EconomicsDocument194 pagesApplication of Computer in EconomicskanishkaNo ratings yet
- Design IssuesDocument12 pagesDesign IssuesAnonymous uspYoqENo ratings yet
- Parallel Computing TerminologyDocument11 pagesParallel Computing Terminologymaxsen021No ratings yet
- Applications of Computer in Educational ResearchDocument9 pagesApplications of Computer in Educational ResearchDr. Swarnima Jaiswal100% (1)
- Introduction to Parallel ComputingDocument15 pagesIntroduction to Parallel Computingsatish161188No ratings yet
- Unit 2Document76 pagesUnit 2Alex SonNo ratings yet
- Ch01 Section1 XP 051Document42 pagesCh01 Section1 XP 051watchstgNo ratings yet
- OS Embedded Systems CourseDocument22 pagesOS Embedded Systems CourseVinit PkNo ratings yet
- Lecture 1 - Overview of Distributed ComputingDocument71 pagesLecture 1 - Overview of Distributed ComputingĐình Vũ TrầnNo ratings yet
- Module 1 Chapter1Document37 pagesModule 1 Chapter1Usha Vizay KumarNo ratings yet
- Instructor: L. N. BhuyanDocument32 pagesInstructor: L. N. BhuyanAnkita SharmaNo ratings yet
- Ch1 Computing ParadigmsDocument18 pagesCh1 Computing Paradigmsmba20238No ratings yet
- Lecture 1 - Sec 2 - Introduction To Computer ArchitectureDocument17 pagesLecture 1 - Sec 2 - Introduction To Computer ArchitecturesaifsunnyNo ratings yet
- Computer Organization - IntroductionDocument69 pagesComputer Organization - IntroductiongmgaargiNo ratings yet
- Advanced Computer Architecture: Tran Ngoc Thinh HCMC University of TechnologyDocument46 pagesAdvanced Computer Architecture: Tran Ngoc Thinh HCMC University of TechnologyAnkit GuptaNo ratings yet
- Research Papers On Computer Architecture 2012Document5 pagesResearch Papers On Computer Architecture 2012wwvmdfvkg100% (1)
- Aca 4Document63 pagesAca 4Prateek SharmaNo ratings yet
- CS4230 Parallel Programming: Mary Hall August 21, 2012Document17 pagesCS4230 Parallel Programming: Mary Hall August 21, 2012tt_aljobory3911No ratings yet
- En BodyDocument2 pagesEn BodySarwar KhanNo ratings yet
- CEN510 VHDL Mod1 - IntroductionDocument48 pagesCEN510 VHDL Mod1 - IntroductionDaniel AgbajeNo ratings yet
- Cluster Computing: A Seminar Report Submitted ToDocument39 pagesCluster Computing: A Seminar Report Submitted ToVinayKumarSingh100% (5)
- Parallelism in Computer ArchitectureDocument27 pagesParallelism in Computer ArchitectureKumarNo ratings yet
- Computational Grids: Reasons, Applications and ChallengesDocument40 pagesComputational Grids: Reasons, Applications and ChallengesdaiurqzNo ratings yet
- Complete Lessonplan Aca 12 UnkiDocument19 pagesComplete Lessonplan Aca 12 UnkiSantosh DewarNo ratings yet
- Object-Oriented Technology and Computing Systems Re-EngineeringFrom EverandObject-Oriented Technology and Computing Systems Re-EngineeringNo ratings yet
- Design and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesFrom EverandDesign and Test Strategies for 2D/3D Integration for NoC-based Multicore ArchitecturesNo ratings yet
- Semester Grade CardDocument2 pagesSemester Grade Cardjoel varghese thomasNo ratings yet
- My Grade CardDocument1 pageMy Grade Cardjoel varghese thomasNo ratings yet
- Myhc 27659 PDFDocument1 pageMyhc 27659 PDFghiniiNo ratings yet
- NAD Student Registration Process NAD IDDocument13 pagesNAD Student Registration Process NAD IDSteffinNelsonNo ratings yet
- TkmceDocument3 pagesTkmcejoel varghese thomasNo ratings yet
- Literature ReviewDocument4 pagesLiterature Reviewjoel varghese thomasNo ratings yet
- ACE College BTech Results 2015Document534 pagesACE College BTech Results 2015Sujith VargheseNo ratings yet
- Zapi Combi AC1Document84 pagesZapi Combi AC1ALEJO100% (1)
- Roland Fantom x6Document66 pagesRoland Fantom x6Blair Alward100% (1)
- Ilicore: 4 Channel Driver Motor Driver D5954Document6 pagesIlicore: 4 Channel Driver Motor Driver D5954CIACIACIACIACIACIANo ratings yet
- Philips Tpm17.7e LaDocument73 pagesPhilips Tpm17.7e LaBelkis Amion AlbonigaNo ratings yet
- LED Cube 4x4x4 DIY 3D LED DisplayDocument6 pagesLED Cube 4x4x4 DIY 3D LED DisplayDusan Petrovic100% (1)
- Accedian Networks EtherNID MetroNID 2pg - FINAL - 08.24.13 PDFDocument2 pagesAccedian Networks EtherNID MetroNID 2pg - FINAL - 08.24.13 PDFJesus Christ est digne d'adorationNo ratings yet
- Ngspice 27 ManualDocument624 pagesNgspice 27 ManualMile BelojicaNo ratings yet
- SIMULIA EM EMC For Electonics DatasheetDocument3 pagesSIMULIA EM EMC For Electonics Datasheetkutlu küçükvuralNo ratings yet
- PR 4Document6 pagesPR 4John Paul MoradoNo ratings yet
- Netbiter WS100 User Manual PDFDocument44 pagesNetbiter WS100 User Manual PDFCarlos Castillo UrrunagaNo ratings yet
- Slewing Controller SpecificationDocument7 pagesSlewing Controller SpecificationMohamed ElsayedNo ratings yet
- Neet Class Test Semiconductor Devices 2017Document4 pagesNeet Class Test Semiconductor Devices 2017umved singh yadavNo ratings yet
- Kalila Erving - CircuitBuilderSEDocument8 pagesKalila Erving - CircuitBuilderSECoco LolNo ratings yet
- Lecture - 5: DC-AC Converters: Ug - ProgramDocument54 pagesLecture - 5: DC-AC Converters: Ug - ProgramArife AbdulkerimNo ratings yet
- Introduction To The Network Communication TechnologyDocument4 pagesIntroduction To The Network Communication TechnologyRosalyn TanNo ratings yet
- Test Report Format - NSK5Document5 pagesTest Report Format - NSK5Rsp SrinivasNo ratings yet
- Manual Diagrama Detector de MetalesDocument18 pagesManual Diagrama Detector de MetalesEdmundo Cisneros0% (1)
- Keb F5 Frekventen RegulatorDocument378 pagesKeb F5 Frekventen RegulatorDaceDropNo ratings yet
- Jcoo-7ajs6m R0 enDocument5 pagesJcoo-7ajs6m R0 enOscar OjedaNo ratings yet
- IEEE 5 Bus System DataDocument7 pagesIEEE 5 Bus System Datasengsouvanhphaysaly phaysalyNo ratings yet
- Alarm Kebakaran Dengan Sensor Api Dan AsapDocument6 pagesAlarm Kebakaran Dengan Sensor Api Dan AsapDeny SetiadyNo ratings yet
- 05 FO - NP2006 LTE-FDD Link Budget 71P PDFDocument71 pages05 FO - NP2006 LTE-FDD Link Budget 71P PDFhamzaNo ratings yet
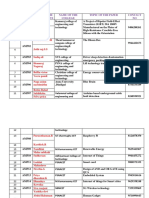
- Suvetha Devi Muthu Priya: S.No Batch NO Name of The Participants Name of The College Topic of The Paper Contact NODocument2 pagesSuvetha Devi Muthu Priya: S.No Batch NO Name of The Participants Name of The College Topic of The Paper Contact NOmanoj3e3790No ratings yet
- ADC Interfacing with 8051 for Data AcquisitionDocument5 pagesADC Interfacing with 8051 for Data AcquisitionSrideviKumaresanNo ratings yet
- Panasonic RX-D29 - en - User Manual PDFDocument12 pagesPanasonic RX-D29 - en - User Manual PDFFlorian Leordeanu0% (1)
- Design and Development of PCB Milling MachineDocument6 pagesDesign and Development of PCB Milling Machinesjcit.bracNo ratings yet
- MyScholar Arduino TrainingDocument42 pagesMyScholar Arduino TrainingPuan SitiNo ratings yet
- L Series IP Camera User ManualDocument24 pagesL Series IP Camera User ManualRicardo BarrazaNo ratings yet
- Recorder7 Data SheetDocument2 pagesRecorder7 Data SheetAnggitan HaryoNo ratings yet
- Data Logger System 7000Document8 pagesData Logger System 7000aishwarya badkulNo ratings yet