You might also like
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- ODEs NotesDocument50 pagesODEs NotesIrvine MugauriNo ratings yet
- mt205 Notes FIRST TOPICDocument75 pagesmt205 Notes FIRST TOPICLloyd MunthaliNo ratings yet
- LW 1119 Amath250notesDocument8 pagesLW 1119 Amath250notesuser2357No ratings yet
- MatodeDocument11 pagesMatodeVijayaraghavan GNo ratings yet
- Solving ODE in MATLAB: P. Howard Fall 2009Document23 pagesSolving ODE in MATLAB: P. Howard Fall 2009Tanmaya ChughNo ratings yet
- M 651 Course NotesDocument39 pagesM 651 Course NotesNamsaknoi7No ratings yet
- Matlab Methods For OdeDocument16 pagesMatlab Methods For OdeGrassrehLeNo ratings yet
- Delay Differential EquationsDocument25 pagesDelay Differential Equationsbias sufiNo ratings yet
- Simple Harmonic Motions and Difficult Harmonic Motions: Ahmed Saad SabitDocument11 pagesSimple Harmonic Motions and Difficult Harmonic Motions: Ahmed Saad SabitAbid KhanNo ratings yet
- PDF PDFDocument162 pagesPDF PDFJoe NjoreNo ratings yet
- Differential Equations: Eivind EriksenDocument50 pagesDifferential Equations: Eivind EriksenHussam AgabNo ratings yet
- Application of IntregationDocument33 pagesApplication of IntregationasaNo ratings yet
- DE 1st Order EqDocument26 pagesDE 1st Order EqJessaNo ratings yet
- Differential Equations: Graduation Paper MathematicsDocument33 pagesDifferential Equations: Graduation Paper MathematicsMirza MesicNo ratings yet
- DE 2nd Order Eq PDFDocument27 pagesDE 2nd Order Eq PDFkidanemariam teseraNo ratings yet
- Assignment Dierence and Dierential Equations 2009-2010: Group 3Document22 pagesAssignment Dierence and Dierential Equations 2009-2010: Group 3Jan Jakob LameijerNo ratings yet
- Solving Ordinary Differential Equations With MatlabDocument22 pagesSolving Ordinary Differential Equations With MatlabMario ZamoraNo ratings yet
- Some Solved Differential Equations Problems PDFDocument123 pagesSome Solved Differential Equations Problems PDFRafael Bermudez100% (1)
- Asymptotic SDocument88 pagesAsymptotic SapmountNo ratings yet
- Notes MA201 AY2021 22Document38 pagesNotes MA201 AY2021 22Keshavvardhan DNo ratings yet
- Mooculus - Calculus (Printable)Document252 pagesMooculus - Calculus (Printable)Regie ErcillaNo ratings yet
- Dynamics of Differential EquationsDocument53 pagesDynamics of Differential EquationsblahNo ratings yet
- Solving Differential Equations With MatlabDocument20 pagesSolving Differential Equations With MatlabYon Jairo MontoyaNo ratings yet
- Complex Numbers: Evision OtesDocument23 pagesComplex Numbers: Evision OtesDaria PetcaNo ratings yet
- Numerical Mathematics II: Numerical Solution of Ordinary Differential Equations (Lecture Notes) - Peter PhilipDocument119 pagesNumerical Mathematics II: Numerical Solution of Ordinary Differential Equations (Lecture Notes) - Peter Philipvic1234059No ratings yet
- A Guide To Solving Simple ODEs - Brian Mullins - Univ of TorontoDocument7 pagesA Guide To Solving Simple ODEs - Brian Mullins - Univ of TorontoAlda EnglandNo ratings yet
- Unsolved ProblemsDocument117 pagesUnsolved ProblemsBhuvanesh LakshmanapathyNo ratings yet
- FEM ImplementDocument51 pagesFEM ImplementOlympicMarmotNo ratings yet
- Math 430 Complex Analysis: Lecture 8: Derivatives 39Document116 pagesMath 430 Complex Analysis: Lecture 8: Derivatives 39Attiya ShafaqNo ratings yet
- Differential EquationsDocument72 pagesDifferential EquationsJohn BaleNo ratings yet
- F17 XBnotes 1Document39 pagesF17 XBnotes 1Balaji KumarNo ratings yet
- UK University Integration Bee Techniques GuideDocument30 pagesUK University Integration Bee Techniques GuidehNo ratings yet
- Exercises On Independent Component AnalysisDocument5 pagesExercises On Independent Component Analysisyuyang zhangNo ratings yet
- Numerical Analysis: Dublin Institute of Technology, Kevin Street School of Mathematical Sciences A Course inDocument52 pagesNumerical Analysis: Dublin Institute of Technology, Kevin Street School of Mathematical Sciences A Course inAmir NelsonNo ratings yet
- Everyman Diff Eq'sDocument86 pagesEveryman Diff Eq'sNicholas CemenenkoffNo ratings yet
- Math 119 Study Guide/ReviewDocument5 pagesMath 119 Study Guide/ReviewSameer QadriNo ratings yet
- Lecture 1Document232 pagesLecture 1Lujain nassirNo ratings yet
- DE Second Order Concepts PDFDocument7 pagesDE Second Order Concepts PDFmalini72No ratings yet
- Methods For Solving Ordinary Differential Equations (Lecture Notes) - Peter PhilipDocument69 pagesMethods For Solving Ordinary Differential Equations (Lecture Notes) - Peter Philipvic1234059No ratings yet
- OrdinaryDifferentialEquations LMUDocument149 pagesOrdinaryDifferentialEquations LMUJMjm07No ratings yet
- MA209Notes 2017 18 PDFDocument94 pagesMA209Notes 2017 18 PDFSwaggyVBros MNo ratings yet
- Differential Equations CheatsheetDocument9 pagesDifferential Equations CheatsheetNinh Tuấn ĐạtNo ratings yet
- MIT Differential Equations NotesDocument233 pagesMIT Differential Equations NotesTheDarknessNo ratings yet
- MA209Document117 pagesMA209prw1118No ratings yet
- Digital Design Using VHDL A Systems Approach Solution Manual by William J. Dally, R. Curtis Harting, Tor M. AamodtDocument139 pagesDigital Design Using VHDL A Systems Approach Solution Manual by William J. Dally, R. Curtis Harting, Tor M. Aamodtshitemail404 testNo ratings yet
- Differentical Equations Lecture NotesDocument101 pagesDifferentical Equations Lecture Notesashodhiya14No ratings yet
- BMA3207 Numerical Analysis Lecture 5Document11 pagesBMA3207 Numerical Analysis Lecture 5maxwelloduor55No ratings yet
- Lecture Notes On Partial Differential EquationsDocument35 pagesLecture Notes On Partial Differential Equationscgpa9_9barNo ratings yet
- HW5 SolutionsDocument20 pagesHW5 Solutionsargoubi1984No ratings yet
- Module 3F2: Systems and Control Lecture Notes 1: State-Space SystemsDocument32 pagesModule 3F2: Systems and Control Lecture Notes 1: State-Space SystemsCuong ChuNo ratings yet
- Lecture Notes On Differential EquationsDocument156 pagesLecture Notes On Differential EquationsAyesha KhanNo ratings yet
- Unsolved Problems: Date of A New Version: February 9, 2015Document117 pagesUnsolved Problems: Date of A New Version: February 9, 2015Diego SilvaNo ratings yet
- Difference EquationDocument22 pagesDifference EquationtapasNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Thermodynamics Sample ProblemDocument2 pagesThermodynamics Sample ProblemRonelle Royce MarisNo ratings yet
- Trigram Koreanname Celestial Body Season Cardinal Direction Virtue Family Natural Element MeaningDocument9 pagesTrigram Koreanname Celestial Body Season Cardinal Direction Virtue Family Natural Element MeaningRonelle Royce MarisNo ratings yet
- ZipGrade50QuestionV2 PDFDocument1 pageZipGrade50QuestionV2 PDFRonelle Royce MarisNo ratings yet
- Derivation of The Inverse Hyperbolic Trig Functions: y Sinh XDocument4 pagesDerivation of The Inverse Hyperbolic Trig Functions: y Sinh XRonelle Royce MarisNo ratings yet
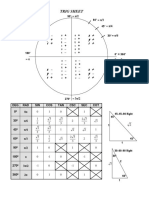
- Trig Sheet PDFDocument2 pagesTrig Sheet PDFSherbimInternetNo ratings yet
- Spherical TrigonometryDocument19 pagesSpherical Trigonometryjohn tanNo ratings yet
- Tan (X) XDocument18 pagesTan (X) XRam KumarNo ratings yet
- Curriculum and Syllabus Under Semester System: Bs (H) in MathematicsDocument43 pagesCurriculum and Syllabus Under Semester System: Bs (H) in MathematicsPretty WorldNo ratings yet
- General Mathematics or Mathematics (Core)Document17 pagesGeneral Mathematics or Mathematics (Core)Akpevweoghene Kelvin IdogunNo ratings yet
- 1 Factoring: Precalculus Review PackageDocument5 pages1 Factoring: Precalculus Review PackageZack CoyNo ratings yet
- 28 36Document10 pages28 36Carlos Moran CepedaNo ratings yet
- Cal 11 Q3 0402 Final PDFDocument20 pagesCal 11 Q3 0402 Final PDFKat DumpNo ratings yet
- Project #5 Even and Odd Signals: S S L U M (© 2 0 0 1, M H - A)Document3 pagesProject #5 Even and Odd Signals: S S L U M (© 2 0 0 1, M H - A)Shrinivas PrabhuNo ratings yet
- Inthinking SL P1 - 2. Sol PDFDocument7 pagesInthinking SL P1 - 2. Sol PDFaryan musaniNo ratings yet
- U4 L4 (Sine, Cosine Law, Amb Case)Document5 pagesU4 L4 (Sine, Cosine Law, Amb Case)1jerushaNo ratings yet
- Store Keeper PDFDocument2 pagesStore Keeper PDFbadaboyNo ratings yet
- Math IB Revision Circular Functions TrigonometryDocument41 pagesMath IB Revision Circular Functions Trigonometrymykiri79100% (2)
- Chapter TwoDocument22 pagesChapter Twoلطيف احمد حسنNo ratings yet
- Adobe Scan 27-Sep-2022Document7 pagesAdobe Scan 27-Sep-2022CREATIVE XNo ratings yet
- CollegeMathText F2016Document204 pagesCollegeMathText F2016PauloMtzNo ratings yet
- 653 150Rev2PubDocument10 pages653 150Rev2PubMuhammad HannanNo ratings yet
- 15.cutter Location Data Optimization in 5 Axis Surface MachiningDocument10 pages15.cutter Location Data Optimization in 5 Axis Surface MachiningNalla PaiyanNo ratings yet
- H2 Mathematics - TrigonometryDocument12 pagesH2 Mathematics - TrigonometryMin YeeNo ratings yet
- Periodic Function: T F L T FDocument29 pagesPeriodic Function: T F L T FDavid WhiteNo ratings yet
- Unit V FunctionsDocument20 pagesUnit V Functionskenemep346No ratings yet
- Maths T Trial Sem 1 PCGHSDocument3 pagesMaths T Trial Sem 1 PCGHSKang Chia UiNo ratings yet
- Section 4-2: Critical Points: FX X X XDocument14 pagesSection 4-2: Critical Points: FX X X Xyou tubeNo ratings yet
- Chapter 9 Trigonometric RelationsDocument20 pagesChapter 9 Trigonometric Relationskayee tangNo ratings yet
- F-37 Ver.1 Dated 20-05-2013-Scheme of Evaluation (Soe)Document6 pagesF-37 Ver.1 Dated 20-05-2013-Scheme of Evaluation (Soe)Ravi Mohan BhattNo ratings yet
- Add MathDocument2 pagesAdd MathrashidbadawiNo ratings yet
- UntitledDocument1,336 pagesUntitledManvith Shetty100% (3)
- CalculusDocument2 pagesCalculusyaadNo ratings yet
- Learn Cbse: Maths Mcqs For Class 12 With Answers Chapter 4 DeterminantsDocument19 pagesLearn Cbse: Maths Mcqs For Class 12 With Answers Chapter 4 DeterminantsSanjayNo ratings yet
- Cbjemasu 10Document5 pagesCbjemasu 10Gyan SinghNo ratings yet