You might also like
- Differential Equations For Engineers and Scientists by Y. Cengel and W. Palm III RESOLUÇÃODocument76 pagesDifferential Equations For Engineers and Scientists by Y. Cengel and W. Palm III RESOLUÇÃOFernanda Coutinho50% (2)
- Class Test 1 2020 With Answers PDFDocument6 pagesClass Test 1 2020 With Answers PDFPeper12345No ratings yet
- Tutor Application FormDocument1 pageTutor Application FormCharisse RiveraNo ratings yet
- Basic Ee For Ce Module 5Document28 pagesBasic Ee For Ce Module 5Charisse RiveraNo ratings yet
- Advanced Engineering Mathematics Course (8th Edition) by Erwin KreyszigDocument35 pagesAdvanced Engineering Mathematics Course (8th Edition) by Erwin Kreyszigmuhammad furqan0% (1)
- Differential Equations IntroDocument29 pagesDifferential Equations IntroMansi NanavatiNo ratings yet
- Summary: First Order Differential EquationsDocument3 pagesSummary: First Order Differential EquationsSamiNo ratings yet
- Differential Equation-02-Solved ExampleDocument8 pagesDifferential Equation-02-Solved ExampleRaju SinghNo ratings yet
- Differential Equations Notes: Author Vincent HuangDocument16 pagesDifferential Equations Notes: Author Vincent HuangVincent HuangNo ratings yet
- Solutions To Homework: Section 10.1Document2 pagesSolutions To Homework: Section 10.1Sabajonhsons SmithNo ratings yet
- Differential Equations 1st Order BernoulliDocument5 pagesDifferential Equations 1st Order Bernoullikalahanmoonga82No ratings yet
- Lecture6 With ExamplesDocument11 pagesLecture6 With ExamplesStephanie ParkNo ratings yet
- Quiz I B MA100 SOLNDocument3 pagesQuiz I B MA100 SOLNWolf shadowNo ratings yet
- Homework #3 Solutions: ProblemsDocument5 pagesHomework #3 Solutions: ProblemsAlexElvirNo ratings yet
- M244: Solutions To Final Exam Review: 2 DX DTDocument15 pagesM244: Solutions To Final Exam Review: 2 DX DTheypartygirlNo ratings yet
- University of Zimbabwe: Linear Algebra and Probability For EngineeringDocument18 pagesUniversity of Zimbabwe: Linear Algebra and Probability For EngineeringPromise GwaindepiNo ratings yet
- Lecture 07 - 2Document7 pagesLecture 07 - 2khani gNo ratings yet
- NotesDocument55 pagesNotesphiliphanyc123No ratings yet
- Chapter 1Document40 pagesChapter 1Santiago Garrido BullónNo ratings yet
- Ode SlidesDocument24 pagesOde Slidesranya.baevaNo ratings yet
- First Order ODE (Online Copy)Document24 pagesFirst Order ODE (Online Copy)saveNo ratings yet
- Math151 Module 2Document11 pagesMath151 Module 2Yanni BarrientosNo ratings yet
- M244: Solutions To Final Exam Review: 2 DX DTDocument15 pagesM244: Solutions To Final Exam Review: 2 DX DTNiky KucingNo ratings yet
- Separable Equations: y G X H DX DyDocument10 pagesSeparable Equations: y G X H DX DyNetwork BullNo ratings yet
- Lecture2 ODEDocument16 pagesLecture2 ODEhoungjunhong03No ratings yet
- 1 Introduction To Differential Equation: 1.1 Definition and TerminologyDocument7 pages1 Introduction To Differential Equation: 1.1 Definition and TerminologyLynx101No ratings yet
- A Critique PaperDocument5 pagesA Critique PaperGilbert BersolaNo ratings yet
- 4 Periodic Orbits: 4.1 Poincar E-Bendixson TheoremDocument12 pages4 Periodic Orbits: 4.1 Poincar E-Bendixson TheoremAnmsich EinsNo ratings yet
- ENGR 213 Sample Midterm 1 Solutions 2007-2008Document4 pagesENGR 213 Sample Midterm 1 Solutions 2007-2008akabaka123No ratings yet
- Solutions Chapter 1Document7 pagesSolutions Chapter 1ALLEN TANAKA MUZORERANo ratings yet
- Differential Equations NoteDocument25 pagesDifferential Equations NoteSumudu DilshanNo ratings yet
- Homework1 Solution PDFDocument4 pagesHomework1 Solution PDFDominikNo ratings yet
- Lecture Notes Chapter 4 of Evans PDEDocument7 pagesLecture Notes Chapter 4 of Evans PDEJoey WachtveitlNo ratings yet
- Ee206 4 PDFDocument70 pagesEe206 4 PDFali arshadNo ratings yet
- Strauss 2 1Document4 pagesStrauss 2 1Video Editing TimeNo ratings yet
- 4 Ordinary Differential EquationsDocument91 pages4 Ordinary Differential EquationsKai CaoNo ratings yet
- ODE: Assignment-4Document9 pagesODE: Assignment-4ShamNo ratings yet
- Linear TransformationDocument42 pagesLinear TransformationBOAMPONG DENNISNo ratings yet
- Ordinary Differential Equation2008Document70 pagesOrdinary Differential Equation2008Tedros AssefaNo ratings yet
- Riccati Equations Questions and SolutionsDocument4 pagesRiccati Equations Questions and SolutionssenaNo ratings yet
- Written Assignment #3: Riccati Equations (Solutions)Document4 pagesWritten Assignment #3: Riccati Equations (Solutions)PaolaNo ratings yet
- Lecture Notes On Ordinary Differential EquationsDocument64 pagesLecture Notes On Ordinary Differential EquationsLaibaNo ratings yet
- Chapter 1 First Order Differential EquationsDocument8 pagesChapter 1 First Order Differential EquationsMehmet Akif KözNo ratings yet
- Solving Ordinary Differential EquationsDocument4 pagesSolving Ordinary Differential EquationsscribdNo ratings yet
- 110 MATH260midterm1practice-SolutionsDocument7 pages110 MATH260midterm1practice-Solutionsfpbmfkh5mtNo ratings yet
- Ch3 - Intro Diff EquationDocument4 pagesCh3 - Intro Diff Equation44. Pol SovanrothanaNo ratings yet
- Evans PDEDocument6 pagesEvans PDEJoey WachtveitlNo ratings yet
- 1 ExDocument7 pages1 Exvennela sainathNo ratings yet
- IMC Simulation: June 15, 2009Document4 pagesIMC Simulation: June 15, 2009Syaifullah MangantjoNo ratings yet
- 1 Review of Key Concepts From Previous Lectures: Lecture Notes - Amber Habib - December 1Document4 pages1 Review of Key Concepts From Previous Lectures: Lecture Notes - Amber Habib - December 1Christopher BellNo ratings yet
- Calculus Assignment FinalDocument16 pagesCalculus Assignment FinalYared DemissieNo ratings yet
- Mathematics-II (MA1201) Ordinary Differential Equations Ratikanta BeheraDocument6 pagesMathematics-II (MA1201) Ordinary Differential Equations Ratikanta BeheraAnurag BanerjeeNo ratings yet
- Sol 1Document4 pagesSol 1Adeyasa RPNo ratings yet
- Instructor: Dr. Yuli B. Rudyak MAP 2302, Differential Equations Sample Final ExamDocument4 pagesInstructor: Dr. Yuli B. Rudyak MAP 2302, Differential Equations Sample Final ExamConnie PacisNo ratings yet
- Intro. To Differential EquationDocument127 pagesIntro. To Differential EquationWASEEM_AKHTERNo ratings yet
- ACFrOgBKZIAfR2 vuKBapmdmSmy7S5nMzwZoNNa d1SvFKmkxniQlslfvbk3p Y8oZRkeRvg3Wm94QapGxAfozfVFiN2ypAniIYmEfRGMX3e1C-89aXK-5in69LQKj8yHC9Ep08cREizyfvyf1wGDocument4 pagesACFrOgBKZIAfR2 vuKBapmdmSmy7S5nMzwZoNNa d1SvFKmkxniQlslfvbk3p Y8oZRkeRvg3Wm94QapGxAfozfVFiN2ypAniIYmEfRGMX3e1C-89aXK-5in69LQKj8yHC9Ep08cREizyfvyf1wGSunil DasNo ratings yet
- Module 4 - Tutorial - Sheet - DET - BMAT102LDocument3 pagesModule 4 - Tutorial - Sheet - DET - BMAT102Lmuhammedriza27No ratings yet
- Chapter 2 Lesson 1 Variable Separable - 1Document5 pagesChapter 2 Lesson 1 Variable Separable - 1Annabelle DukaNo ratings yet
- MATH 1005B: Winter 2015 Test One (Version A) SolutionsDocument3 pagesMATH 1005B: Winter 2015 Test One (Version A) SolutionssadorNo ratings yet
- EXAM 1 - MATH 212 - 2017 - SolutionDocument3 pagesEXAM 1 - MATH 212 - 2017 - SolutionTaleb AbboudNo ratings yet
- Solutions To Week 9 Exercises and ObjectivesDocument4 pagesSolutions To Week 9 Exercises and ObjectivesbelindaNo ratings yet
- 1st Order PDFDocument26 pages1st Order PDFkurakidNo ratings yet
- Test 1 SolutionsDocument3 pagesTest 1 SolutionsFrantz ClermontNo ratings yet
- Introductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)From EverandIntroductory Differential Equations: with Boundary Value Problems, Student Solutions Manual (e-only)No ratings yet
- Buyani Express PayDocument1 pageBuyani Express PayCharisse RiveraNo ratings yet
- Mapua Institute of Technology: Experiment No. 1 Gas LawsDocument1 pageMapua Institute of Technology: Experiment No. 1 Gas LawsCharisse RiveraNo ratings yet
- Piano Keys LabelDocument1 pagePiano Keys LabelCharisse RiveraNo ratings yet
- 4.c Concrete Cracking Can Be Caused On A Combination of Factors Such As Drying Shrinkage, ThermalDocument1 page4.c Concrete Cracking Can Be Caused On A Combination of Factors Such As Drying Shrinkage, ThermalCharisse RiveraNo ratings yet
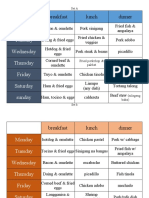
- Breakfast Lunch Dinner: Monday Tuesday Wednesday Thursday Friday Saturday SundayDocument3 pagesBreakfast Lunch Dinner: Monday Tuesday Wednesday Thursday Friday Saturday SundayCharisse RiveraNo ratings yet
- Mapua Institute of Technology: Analytic Geometry PortfolioDocument1 pageMapua Institute of Technology: Analytic Geometry PortfolioCharisse RiveraNo ratings yet
- PSY10 Q1 PowerpointDocument134 pagesPSY10 Q1 PowerpointCharisse RiveraNo ratings yet
- Sin X: Which of The Following Is Equivalent ToDocument10 pagesSin X: Which of The Following Is Equivalent ToCharisse RiveraNo ratings yet
- Cost-Effective and Sustainable Road Slope Stabilization and Erosion Control PDFDocument82 pagesCost-Effective and Sustainable Road Slope Stabilization and Erosion Control PDFCharisse RiveraNo ratings yet
- Math14 - Lesson 8Document21 pagesMath14 - Lesson 8Charisse RiveraNo ratings yet
- Chag Ce40 Co2 PDFDocument4 pagesChag Ce40 Co2 PDFCharisse RiveraNo ratings yet
- Basic Ee For Ce Module 8Document12 pagesBasic Ee For Ce Module 8Charisse RiveraNo ratings yet
- Ce40 A1 Cpr4 VictoriaDocument3 pagesCe40 A1 Cpr4 VictoriaCharisse RiveraNo ratings yet
- Traffic and Highway Engineering - CE122-2Document1 pageTraffic and Highway Engineering - CE122-2Charisse Rivera0% (1)
- Surveying Problems PDFDocument70 pagesSurveying Problems PDFCharisse RiveraNo ratings yet
- FW No. 1Document13 pagesFW No. 1Charisse RiveraNo ratings yet
- CourseDocument73 pagesCourseCharisse RiveraNo ratings yet
- Effect of Gravity and Centrifugal ForcesDocument21 pagesEffect of Gravity and Centrifugal ForcesCharisse RiveraNo ratings yet
- Ordinary Differential EquationDocument13 pagesOrdinary Differential EquationrahimuddinNo ratings yet
- Numerical Analysis II: Xiaojing Ye, Math & Stat, Georgia State UniversityDocument103 pagesNumerical Analysis II: Xiaojing Ye, Math & Stat, Georgia State UniversityAnyumiza InnocentNo ratings yet
- Differential EquationsDocument231 pagesDifferential EquationsNasir NaeemNo ratings yet
- Demo DiffEQDocument26 pagesDemo DiffEQHarishNo ratings yet
- Constant For F.: The Elementary Theory of Initial-Value Problems - (7.1)Document5 pagesConstant For F.: The Elementary Theory of Initial-Value Problems - (7.1)wandileNo ratings yet
- First-Order Equations: 1.1 The Simplest ExampleDocument19 pagesFirst-Order Equations: 1.1 The Simplest Examplecheenu15No ratings yet
- Application of Lie-Group Symmetry AnalysisDocument35 pagesApplication of Lie-Group Symmetry Analysiscatfan42No ratings yet
- Chapter 6 - Differential EquationsDocument33 pagesChapter 6 - Differential Equationsdiktatorimhotep8800No ratings yet
- 2-0-Solution To Differential EquationsDocument5 pages2-0-Solution To Differential EquationsGedeon BetosNo ratings yet
- TMA4125 Matematikk 4N Vår 2007: Exercise Set 8Document2 pagesTMA4125 Matematikk 4N Vår 2007: Exercise Set 8Jomin TomyNo ratings yet
- Homework 3: ANSWERSDocument4 pagesHomework 3: ANSWERSkrishnaNo ratings yet
- Interval of ValidityDocument9 pagesInterval of ValidityJustice Appiah NuamahNo ratings yet
- (Graduate Studies in Mathematics) Luis Barreira, Claudia Valls-Ordinary Differential Equations - Qualitative Theory-American Mathematical Society (2012)Document265 pages(Graduate Studies in Mathematics) Luis Barreira, Claudia Valls-Ordinary Differential Equations - Qualitative Theory-American Mathematical Society (2012)BrunoDanielGómezLabra100% (3)
- Mila Neural ODEs Tutorial Vikram VoletiDocument51 pagesMila Neural ODEs Tutorial Vikram VoletiDavid Garrido GonzalezNo ratings yet
- LN02 StudentsDocument20 pagesLN02 StudentsJohn DoeNo ratings yet
- DEDocument10 pagesDEosukotiNo ratings yet
- Map2302 Lecture 1 2011-3: The Lotka-Volterra Predator-Prey EquationsDocument18 pagesMap2302 Lecture 1 2011-3: The Lotka-Volterra Predator-Prey EquationsChristian SarmientoNo ratings yet
- Diff EQ SoltionsDocument242 pagesDiff EQ SoltionsLake LoweNo ratings yet
- IJRRAS - 21 - 1 - 02-Shooting Method PDFDocument23 pagesIJRRAS - 21 - 1 - 02-Shooting Method PDFCh Muhammad Furqan ShafiqNo ratings yet
- Elementary Differential Equations 10th Edition Boyce Solutions ManualDocument53 pagesElementary Differential Equations 10th Edition Boyce Solutions Manualmrbrandongonzalezrcajsipdwx100% (14)
- Euler MethodDocument36 pagesEuler Methodrashidashfaq001No ratings yet
- 2011 09 02 - 0444705007Document407 pages2011 09 02 - 0444705007gustavogardunno5853100% (2)
- HabeebKhudhurKadhim A 20 PDFDocument17 pagesHabeebKhudhurKadhim A 20 PDFSyeda Tehmina100% (1)
- Gronwall InequalityDocument4 pagesGronwall InequalityMuhammad Abdulloh MNo ratings yet
- Lax - Hyperbolic Systems of Conservation Laws and The Mathematical Theory of Shock WavesDocument59 pagesLax - Hyperbolic Systems of Conservation Laws and The Mathematical Theory of Shock WavesDamiano BaccarellaNo ratings yet
- 03.1.2 - Solutions of Some Differential EquationsDocument11 pages03.1.2 - Solutions of Some Differential Equationswe_spidus_2006No ratings yet
- Math+204+Lecture+Notes+by+Ebraheem+Alzahrani Section+1.2 PDFDocument5 pagesMath+204+Lecture+Notes+by+Ebraheem+Alzahrani Section+1.2 PDFZulqarnain KhanNo ratings yet
- Solve Systems of Differential EquationsDocument225 pagesSolve Systems of Differential EquationsInspire LoNo ratings yet