You might also like
- Extent On Point, Lin.e, and 3-Dimension-Al Data. Keywords: Quadtrees, Octrees Hierarchical Data Structures, Computer GraphicsDocument18 pagesExtent On Point, Lin.e, and 3-Dimension-Al Data. Keywords: Quadtrees, Octrees Hierarchical Data Structures, Computer GraphicsSatyajeet ParidaNo ratings yet
- 2014 Nov Math IIDocument24 pages2014 Nov Math IImin LeeNo ratings yet
- L XK Ileprtmmt: Udver Fo DapplhdDocument4 pagesL XK Ileprtmmt: Udver Fo DapplhdGnanasegaran RishiNo ratings yet
- L-1/T-2/CE Date: 30/01/2012Document15 pagesL-1/T-2/CE Date: 30/01/2012SK Adnan IslamNo ratings yet
- Implementing The SPIHT Algorithm in MATLABDocument12 pagesImplementing The SPIHT Algorithm in MATLABmap281230No ratings yet
- PWMin Power MetersDocument9 pagesPWMin Power MetersMylavarapu SriprithamNo ratings yet
- Lightning Performance - IDocument6 pagesLightning Performance - IAndres Caviedes ArevaloNo ratings yet
- FuzzyDocument13 pagesFuzzySaurabh Rajput33% (3)
- Surveying II O18 R15 3012Document3 pagesSurveying II O18 R15 3012Sufaira ShahadiyaNo ratings yet
- Low Loss Circular Birefringence in ArtifDocument12 pagesLow Loss Circular Birefringence in Artifajgarciacollado2019No ratings yet
- Control System 1Document31 pagesControl System 1Rakibul Hasan RakibNo ratings yet
- A Study About Fpga-Based Digital Filters: Javier Valls Marcos M. Peiró Trini Sansaloni Eduardo BoemoDocument10 pagesA Study About Fpga-Based Digital Filters: Javier Valls Marcos M. Peiró Trini Sansaloni Eduardo BoemoShafiullaShaikNo ratings yet
- Me Oct2011 PDFDocument1,050 pagesMe Oct2011 PDFrahimmullaNo ratings yet
- 電子期中考Document4 pages電子期中考吳孟珊No ratings yet
- BNM PBLDocument10 pagesBNM PBLaviral agrohiNo ratings yet
- 3.1 Width CalculationDocument7 pages3.1 Width CalculationSarath TejaNo ratings yet
- 1973 - Baillie & Pilcher - MetodologiaDocument9 pages1973 - Baillie & Pilcher - MetodologiaVictor LeryNo ratings yet
- Bresenham AlgoritmoDocument6 pagesBresenham Algoritmofrank remediosNo ratings yet
- Ecs-702 Digital Image Processing 2013-14Document4 pagesEcs-702 Digital Image Processing 2013-14Rishabh RajNo ratings yet
- Mecom1 Question PaperDocument12 pagesMecom1 Question Paperpajadhav100% (1)
- Part A (10X2 20 Marks) : Dept, of Ece, Ceg Campus, Annauniversity End Semester Examinations Apr-May 2011Document4 pagesPart A (10X2 20 Marks) : Dept, of Ece, Ceg Campus, Annauniversity End Semester Examinations Apr-May 2011Seenivasan MaNo ratings yet
- TD P1 2020 PDFDocument15 pagesTD P1 2020 PDFElijah Baptiste100% (2)
- Non-Negative Matrix Factor Deconvolution Extracation of Multiple Sound Sources From Monophonic InputsDocument8 pagesNon-Negative Matrix Factor Deconvolution Extracation of Multiple Sound Sources From Monophonic Inputsarkamukherjee4921No ratings yet
- Bme 403 QDocument12 pagesBme 403 Qmunirajoshon109No ratings yet
- CSEC Technical Drawing 2012 P1Document25 pagesCSEC Technical Drawing 2012 P1Tamera Green0% (1)
- Image Processing: Characteristics of Image OperationsDocument11 pagesImage Processing: Characteristics of Image OperationsRam2646No ratings yet
- A Screening Method For The Optimal Selection of Plate Heat Exchanger ConfigurationDocument6 pagesA Screening Method For The Optimal Selection of Plate Heat Exchanger Configurationchiali samirNo ratings yet
- Printed (Following Roll To Filled in Your: Paper and NoDocument6 pagesPrinted (Following Roll To Filled in Your: Paper and NoRahul GandhiNo ratings yet
- Ume805 4Document2 pagesUme805 4Raunaq SinghNo ratings yet
- Assigment 1Document8 pagesAssigment 1fiseco4756No ratings yet
- Solución To Slice A STL FileDocument4 pagesSolución To Slice A STL FileelectroternalNo ratings yet
- Simplified State Space Layers For SequenceDocument35 pagesSimplified State Space Layers For SequenceTanay MaheshwariNo ratings yet
- Smith 1979Document10 pagesSmith 1979urgent urgentNo ratings yet
- Computer Graphics and MultimediaDocument3 pagesComputer Graphics and Multimediashivrajchangle00No ratings yet
- A2 - 34W2 Caribbean Examinations: 2013234 CouncilDocument5 pagesA2 - 34W2 Caribbean Examinations: 2013234 Councilmash ManyangeNo ratings yet
- A2 - 34W2 Caribbean Examinations: 2013234 CouncilDocument5 pagesA2 - 34W2 Caribbean Examinations: 2013234 Councilmash ManyangeNo ratings yet
- Trifilar PendDocument7 pagesTrifilar PendPranav RaveendranNo ratings yet
- CG Question BankDocument4 pagesCG Question BankRudresh VyasNo ratings yet
- Simulation LabDocument83 pagesSimulation LabsonucharyNo ratings yet
- Lecture Notes 2 Data Organization and PresentationDocument26 pagesLecture Notes 2 Data Organization and PresentationEnock T MuchinakoNo ratings yet
- NigamJennings CalResponseSpectra1969 PDFDocument14 pagesNigamJennings CalResponseSpectra1969 PDFCristianMolinaOreNo ratings yet
- Computer Graphics (ECS-504) 2011-12-2Document4 pagesComputer Graphics (ECS-504) 2011-12-2Ajay YadavNo ratings yet
- An Excel Spreadsheet For Finite Strain Analysis Using The RF F TechniqueDocument5 pagesAn Excel Spreadsheet For Finite Strain Analysis Using The RF F TechniqueErnesto Prendin NetoNo ratings yet
- Define Stack and Queue and Also Write Its Basic OperationsDocument36 pagesDefine Stack and Queue and Also Write Its Basic OperationsrameshNo ratings yet
- DSD Midsem PapersDocument14 pagesDSD Midsem PapersRanveerNo ratings yet
- Coaparison of Profile Measureaent and Analysis KethodsDocument75 pagesCoaparison of Profile Measureaent and Analysis KethodsJenny Salgado Garcia.No ratings yet
- SPE-14765-MS-Applications of A BHA Analysis Program in Directional DrillingDocument10 pagesSPE-14765-MS-Applications of A BHA Analysis Program in Directional Drillingsaeed65No ratings yet
- Smoke Rings From SmokeDocument9 pagesSmoke Rings From SmokepinkallNo ratings yet
- Rigid Body Kinematics Assignment ProblemsDocument5 pagesRigid Body Kinematics Assignment Problemsdeshdeepak13No ratings yet
- Department of Electronics and Telecommunication Engineering: R T R T TDocument3 pagesDepartment of Electronics and Telecommunication Engineering: R T R T TSurangaGNo ratings yet
- Handling Big Tabular Data of ICT Supply Chains A Multi Task Machine Interpretable ApproachDocument13 pagesHandling Big Tabular Data of ICT Supply Chains A Multi Task Machine Interpretable ApproachMadhvi BihadeNo ratings yet
- x x x x R such that x x x a b a b a R. b a b a R - (5%) 【101 交大資訊聯招】Document4 pagesx x x x R such that x x x a b a b a R. b a b a R - (5%) 【101 交大資訊聯招】陳傳中No ratings yet
- GARCH Models: Structure, Statistical Inference and Financial ApplicationsFrom EverandGARCH Models: Structure, Statistical Inference and Financial ApplicationsRating: 5 out of 5 stars5/5 (1)
- Trifocal Tensor: Exploring Depth, Motion, and Structure in Computer VisionFrom EverandTrifocal Tensor: Exploring Depth, Motion, and Structure in Computer VisionNo ratings yet
- Computer Processing of Remotely-Sensed Images: An IntroductionFrom EverandComputer Processing of Remotely-Sensed Images: An IntroductionNo ratings yet
- Slide Gate AC SD 1006Document2 pagesSlide Gate AC SD 1006thrayambakNo ratings yet
- Thermodynamics Chapter 3 Solution Sta MariaDocument7 pagesThermodynamics Chapter 3 Solution Sta MariaJean PD81% (21)
- Risk Management Plan: Fatima Hill Pharmacy APRIL 2019Document11 pagesRisk Management Plan: Fatima Hill Pharmacy APRIL 2019Sushmita Mae Cajes90% (10)
- Organizational Structure Amp Leadership Style in Ms Larsen Amp Toubro MumbaiDocument44 pagesOrganizational Structure Amp Leadership Style in Ms Larsen Amp Toubro Mumbainikky chaudharyNo ratings yet
- Paints As A Building MaterialsDocument26 pagesPaints As A Building MaterialsPawan Gupta100% (1)
- Specsheet Chromebase Commercial 22 PDFDocument2 pagesSpecsheet Chromebase Commercial 22 PDFMarisagarcia2014No ratings yet
- KTM 690endDocument60 pagesKTM 690endPedro Martinez RuizNo ratings yet
- 4th Quarter Sector Performance Report FinalDocument27 pages4th Quarter Sector Performance Report FinalPulsmade MalawiNo ratings yet
- 9 KnegteringDocument13 pages9 KnegteringMohammad Reza AnghaeiNo ratings yet
- Junction CapacityDocument6 pagesJunction CapacityNURIN HAZIRAH HASBI ZAIDINo ratings yet
- SIS - Plano Eléctrico de Tractor D6N CAT PDFDocument28 pagesSIS - Plano Eléctrico de Tractor D6N CAT PDFRoy Huaripata100% (2)
- (Airliner Tech 08) L-1011-TristarDocument107 pages(Airliner Tech 08) L-1011-Tristarmunjalshah94100% (3)
- Unsintered Polytetrafluoroethylene (PTFE) Extruded Film or TapeDocument4 pagesUnsintered Polytetrafluoroethylene (PTFE) Extruded Film or TapeShiv PandeyNo ratings yet
- ADP 2 Lab ManualDocument102 pagesADP 2 Lab ManualKishoremcNo ratings yet
- About KirloskarvadiDocument4 pagesAbout KirloskarvadiKamlesh DeorukhkarNo ratings yet
- Evacuation, Escape and RescueDocument26 pagesEvacuation, Escape and RescueBanjo100% (1)
- Hitec Power Protection B.VDocument87 pagesHitec Power Protection B.VtarsudinNo ratings yet
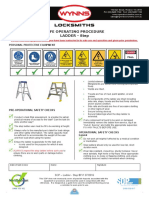
- Wynns SOP Ladder StepDocument5 pagesWynns SOP Ladder StepAlketa ZakaNo ratings yet
- Pro-Ject Primary ManualDocument8 pagesPro-Ject Primary ManualJuan PerezNo ratings yet
- ASTM F899-09 Íâ¿ÆÆ÷Ð ÓÃ Ä Ðâ Ö °ô ĺÍË¿ ÄDocument6 pagesASTM F899-09 Íâ¿ÆÆ÷Ð ÓÃ Ä Ðâ Ö °ô ĺÍË¿ ÄNez OlivarNo ratings yet
- TLGB 1886e 2022Document1 pageTLGB 1886e 2022ANo ratings yet
- Is 101 5 2 1988 PDFDocument23 pagesIs 101 5 2 1988 PDFdombipinNo ratings yet
- De Longhi - Ecam26.455.c Primadonna SDocument7 pagesDe Longhi - Ecam26.455.c Primadonna SEdgar RichterNo ratings yet
- Mist PDFDocument28 pagesMist PDFGanesh GanyNo ratings yet
- Sediment Design GuideDocument239 pagesSediment Design GuidevanjadamjanovicNo ratings yet
- 11 TH STD PracticalDocument21 pages11 TH STD PracticalRudra PatelNo ratings yet
- 390 Adventure MY 20Document77 pages390 Adventure MY 20Asura GarageNo ratings yet
- Users Manual: MegohmmeterDocument41 pagesUsers Manual: MegohmmeterFelipe Ruben AlejoNo ratings yet
- Comparisons Between Petronas Twin Tower and Taipei 101Document42 pagesComparisons Between Petronas Twin Tower and Taipei 101ﹺ ﹺ ﹺ ﹺNo ratings yet
- Encore" 500 and Eclipse" Electronic Calibration (Pump Software Version 1.5.40 or Higher)Document3 pagesEncore" 500 and Eclipse" Electronic Calibration (Pump Software Version 1.5.40 or Higher)Marjorie AlexandraNo ratings yet