You might also like
- Endoscopic Procedures on the SpineFrom EverandEndoscopic Procedures on the SpineJin-Sung KimNo ratings yet
- 10 1097mao 0000000000000390Document4 pages10 1097mao 0000000000000390Meva'a RogerNo ratings yet
- Micro Chicken WingsDocument5 pagesMicro Chicken WingsAhmed BouzouidaNo ratings yet
- 2004 - A 7 Year Life Table Analysis From A Prospective Study On ITI Implants With Special Emphasis On The Use of Short ImplantsDocument8 pages2004 - A 7 Year Life Table Analysis From A Prospective Study On ITI Implants With Special Emphasis On The Use of Short ImplantsLenny GrauNo ratings yet
- The Joint Tip Graft: A Joint Support For Rim, Facet and Infratip Lobule in RhinoplastyDocument7 pagesThe Joint Tip Graft: A Joint Support For Rim, Facet and Infratip Lobule in RhinoplastyGöksel TurhalNo ratings yet
- Thoracic Endoscopic Spine Surgery A ComprehensiveDocument11 pagesThoracic Endoscopic Spine Surgery A Comprehensivesanjay chhawraNo ratings yet
- Endoscopic-Assisted Microsurgical Techniques at The CraniovertebralDocument9 pagesEndoscopic-Assisted Microsurgical Techniques at The CraniovertebralAminou MounirouNo ratings yet
- Badie2004 PDFDocument11 pagesBadie2004 PDFBhayu Rizallinoor BhayuNo ratings yet
- Badie 2004Document11 pagesBadie 2004Bhayu Rizallinoor BhayuNo ratings yet
- Quantitative Anatomical Comparison of Anterior, Anterolateral and Lateral, Microsurgical and Endoscopic Approaches To The Middle Cranial FossaDocument49 pagesQuantitative Anatomical Comparison of Anterior, Anterolateral and Lateral, Microsurgical and Endoscopic Approaches To The Middle Cranial FossaAndrés BotelloNo ratings yet
- Exemplu 5Document5 pagesExemplu 5Pavel SebastianNo ratings yet
- (10920684 - Neurosurgical Focus) Surgical Management of Trigeminal Schwannomas - Defining The Role For Endoscopic Endonasal ApproachesDocument9 pages(10920684 - Neurosurgical Focus) Surgical Management of Trigeminal Schwannomas - Defining The Role For Endoscopic Endonasal ApproachesasiyazaidiaNo ratings yet
- FDP AvulsionDocument8 pagesFDP AvulsionNico BrantesNo ratings yet
- Anterior Clinoid ProcessDocument5 pagesAnterior Clinoid ProcesskushalNo ratings yet
- EDJ - Volume 62 - Issue Issue 1 - January (Oral Surgery) - Pages 955-958Document4 pagesEDJ - Volume 62 - Issue Issue 1 - January (Oral Surgery) - Pages 955-958Mohammed FaroukNo ratings yet
- The New Backbone of Cervical Interventions: Application NoteDocument2 pagesThe New Backbone of Cervical Interventions: Application NoteMustafaNo ratings yet
- 586 2012 Article 2505Document6 pages586 2012 Article 2505sulthoni ikaNo ratings yet
- Free Hand Technique Lumbar Spine Pedicle Screw Placement in Indian PopulationDocument5 pagesFree Hand Technique Lumbar Spine Pedicle Screw Placement in Indian PopulationMaharajothiNo ratings yet
- SurgNeurolInt 2012 3 1 68 97537 PDFDocument6 pagesSurgNeurolInt 2012 3 1 68 97537 PDFHumberto SandovalNo ratings yet
- (10920684 - Neurosurgical Focus) Petroclival Meningiomas - An Update On Surgical Approaches, Decision Making, and Treatment ResultsDocument10 pages(10920684 - Neurosurgical Focus) Petroclival Meningiomas - An Update On Surgical Approaches, Decision Making, and Treatment ResultsDr MorellNo ratings yet
- Modifications To A 3d-Printed Temporal Bone Model For Augmented Stapes Fixation Surgery TeachingDocument7 pagesModifications To A 3d-Printed Temporal Bone Model For Augmented Stapes Fixation Surgery TeachingAdarsh GhoshNo ratings yet
- 2017 Article 1147 PDFDocument6 pages2017 Article 1147 PDFajaymanvikar007No ratings yet
- Gibson Et Al-2012-Transforaminal Endoscopic Spinal SurgeryDocument7 pagesGibson Et Al-2012-Transforaminal Endoscopic Spinal SurgeryjuanguapoNo ratings yet
- Annotated Bibliography FinalDocument15 pagesAnnotated Bibliography Finaledetrez94No ratings yet
- Transcranial EndosDocument4 pagesTranscranial EndosbenedettoNo ratings yet
- Novel Intraoral Ultrasonography To Assess Midpalatal Suture AnatomyDocument2 pagesNovel Intraoral Ultrasonography To Assess Midpalatal Suture AnatomyRommy MelgarejoNo ratings yet
- Comparison of Pre Procedural and Real Time Ultrasound Guided Spinal Anesthesia For Traumatic Lower Limb InjuryDocument7 pagesComparison of Pre Procedural and Real Time Ultrasound Guided Spinal Anesthesia For Traumatic Lower Limb InjuryIJAR JOURNALNo ratings yet
- Jurnal TelingaDocument9 pagesJurnal TelingaHasan HusienNo ratings yet
- 2017 Results of Endoscopically-Assisted Cubital Tunnel Release Without Using Any Specific InstrumentDocument4 pages2017 Results of Endoscopically-Assisted Cubital Tunnel Release Without Using Any Specific InstrumentDimitris RodriguezNo ratings yet
- Incorporatingendoscopic Earsurgeryintoyour Clinicalpractice: Elliott D. Kozin,, Ruwan Kiringoda,, Daniel J. LeeDocument15 pagesIncorporatingendoscopic Earsurgeryintoyour Clinicalpractice: Elliott D. Kozin,, Ruwan Kiringoda,, Daniel J. LeeStanislaus Stanley SuhermanNo ratings yet
- A Bent Needle Tip During Irrigation For Enchondroma of The Distal Phalanx: A New Curettage ToolDocument9 pagesA Bent Needle Tip During Irrigation For Enchondroma of The Distal Phalanx: A New Curettage ToolusmandumassarNo ratings yet
- International Journal of Surgery Case ReportsDocument5 pagesInternational Journal of Surgery Case Reportscarlos javier andraadeNo ratings yet
- Fsurg 10 1277997Document3 pagesFsurg 10 1277997Abhilash VemulaNo ratings yet
- DownloadDocument12 pagesDownloadhasan nazzalNo ratings yet
- OMX Volume 12 Issue 1 Pages 14-20Document7 pagesOMX Volume 12 Issue 1 Pages 14-20JyothishNo ratings yet
- Otoplasty Through Ventral Skin Incision and Shaping of The Antihelix by Abrasion-A Retrospective StudyDocument8 pagesOtoplasty Through Ventral Skin Incision and Shaping of The Antihelix by Abrasion-A Retrospective StudyKihyun YooNo ratings yet
- EJMCM Volume 9 Issue 6 Pages 2361-2368Document8 pagesEJMCM Volume 9 Issue 6 Pages 2361-2368ManikyaRameshNo ratings yet
- Novel Surgical Technique For Clavicle Graft HarvestDocument5 pagesNovel Surgical Technique For Clavicle Graft Harvestsanchaita kohliNo ratings yet
- Training Safer Orthopedic SurgeonsDocument6 pagesTraining Safer Orthopedic SurgeonsDania ZaidNo ratings yet
- Training in Microvascular Surgery UsingDocument4 pagesTraining in Microvascular Surgery UsingBob sponjaNo ratings yet
- Chapter Six SuturingDocument35 pagesChapter Six SuturinglaparoscopicdrNo ratings yet
- IphoneDocument8 pagesIphonegerrymikepalisocNo ratings yet
- The Roof of The Labyrinthine Facial Nerve Canal and The Geniculate Ganglion Fossa On High-Resolution Computed Tomography - Dehiscence Thickness and PneumatizationDocument11 pagesThe Roof of The Labyrinthine Facial Nerve Canal and The Geniculate Ganglion Fossa On High-Resolution Computed Tomography - Dehiscence Thickness and PneumatizationSa'Deu FondjoNo ratings yet
- Abdallah 2017 PCL Avulsion OpenDocument6 pagesAbdallah 2017 PCL Avulsion Openshafia bunga nayradinaNo ratings yet
- Consensus Statement: Colorectal Disease. 2023 00:1-14Document14 pagesConsensus Statement: Colorectal Disease. 2023 00:1-14Alpar KissNo ratings yet
- Soni2012 PDFDocument5 pagesSoni2012 PDFdaviNo ratings yet
- Dopler en ChiariDocument8 pagesDopler en Chiarijdelta28No ratings yet
- Immersive Surgical Anatomy of The Pterional ApproachDocument25 pagesImmersive Surgical Anatomy of The Pterional ApproachVenansius Ratno KurniawanNo ratings yet
- Multi ParameterDocument8 pagesMulti ParameterjhonjrodriNo ratings yet
- Facial and Cochlear Nerve Complications Following Microsurgical Resection of Vestibular Schwannomas in A Series of 221 CasesDocument5 pagesFacial and Cochlear Nerve Complications Following Microsurgical Resection of Vestibular Schwannomas in A Series of 221 CasesSa'Deu FondjoNo ratings yet
- Endoscopy in NeurosurgeryDocument8 pagesEndoscopy in Neurosurgerydps_1976No ratings yet
- Cers Cadwell LucDocument3 pagesCers Cadwell LucVictorioStokNo ratings yet
- Ormond 2013Document12 pagesOrmond 2013Hafiz AlfarizieNo ratings yet
- PIIS1529943021008196Document11 pagesPIIS1529943021008196Juan Carlos del ReyNo ratings yet
- Sutura X Art.Document11 pagesSutura X Art.jessica5rcNo ratings yet
- Marques Et Al, 2014 - A Highly Reproducible Mouse Model of Compression SCIDocument8 pagesMarques Et Al, 2014 - A Highly Reproducible Mouse Model of Compression SCISuelen Adriani MarquesNo ratings yet
- Anterior Clinoid Process2Document10 pagesAnterior Clinoid Process2kushalNo ratings yet
- Endoscopic Endonasal Reconstruction of Anterior Skull Base Defects What Factors Really Affect The OutcomesDocument8 pagesEndoscopic Endonasal Reconstruction of Anterior Skull Base Defects What Factors Really Affect The OutcomesSanooj SeyedNo ratings yet
- Knife Plus SnareDocument3 pagesKnife Plus SnareCorey LibbyNo ratings yet
- Microsurgical Training With FreshDocument5 pagesMicrosurgical Training With FreshBob sponjaNo ratings yet
- AO Surgery Reference Lenke ClassificationDocument1 pageAO Surgery Reference Lenke ClassificationDavid LiNo ratings yet
- Kogler 1996Document10 pagesKogler 1996David LiNo ratings yet
- PBL報告 (BLOCK8 A2)Document5 pagesPBL報告 (BLOCK8 A2)David LiNo ratings yet
- 2008 Nov BicarbonateDocument3 pages2008 Nov BicarbonateDavid LiNo ratings yet
- Renal Handling of Ammonium and Acid Base Regulation: Review ArticleDocument5 pagesRenal Handling of Ammonium and Acid Base Regulation: Review ArticleDavid LiNo ratings yet
- A Reduction in ATP Demand and Mitochondrial ActivityDocument11 pagesA Reduction in ATP Demand and Mitochondrial ActivityDavid LiNo ratings yet
- CH22Document23 pagesCH22David LiNo ratings yet
- Gen Eng News 2001 PerfusionDocument2 pagesGen Eng News 2001 PerfusionDavid LiNo ratings yet
- Diels Alder ReactionDocument6 pagesDiels Alder ReactionEdward PittsNo ratings yet
- Application Flyer Annexin V Assay HPDocument2 pagesApplication Flyer Annexin V Assay HPDavid LiNo ratings yet
- Alpha Tech India Limited - FinalDocument4 pagesAlpha Tech India Limited - FinalRahul rNo ratings yet
- Read The Text and Answer The QuestionsDocument5 pagesRead The Text and Answer The QuestionsDanny RuedaNo ratings yet
- T-61.246 Digital Signal Processing and Filtering T-61.246 Digitaalinen Signaalink Asittely Ja Suodatus Description of Example ProblemsDocument35 pagesT-61.246 Digital Signal Processing and Filtering T-61.246 Digitaalinen Signaalink Asittely Ja Suodatus Description of Example ProblemsDoğukan TuranNo ratings yet
- Balkhu Squatter SettlementDocument10 pagesBalkhu Squatter SettlementShramina ShresthaNo ratings yet
- Urban LifestyleDocument27 pagesUrban LifestyleNindy AslindaNo ratings yet
- Put Them Into A Big Bowl. Serve The Salad in Small Bowls. Squeeze Some Lemon Juice. Cut The Fruits Into Small Pieces. Wash The Fruits. Mix The FruitsDocument2 pagesPut Them Into A Big Bowl. Serve The Salad in Small Bowls. Squeeze Some Lemon Juice. Cut The Fruits Into Small Pieces. Wash The Fruits. Mix The FruitsNithya SweetieNo ratings yet
- OpenGL in JitterDocument19 pagesOpenGL in JitterjcpsimmonsNo ratings yet
- Formula BookletDocument2 pagesFormula BookletOm PatelNo ratings yet
- 033 - Flight Planning Monitoring - QuestionsDocument126 pages033 - Flight Planning Monitoring - QuestionsEASA ATPL Question Bank100% (4)
- The Morning Calm Korea Weekly - August 22,2008Document24 pagesThe Morning Calm Korea Weekly - August 22,2008Morning Calm Weekly NewspaperNo ratings yet
- Ingredients EnsaymadaDocument3 pagesIngredients Ensaymadajessie OcsNo ratings yet
- Applications of Remote Sensing and Gis For UrbanDocument47 pagesApplications of Remote Sensing and Gis For UrbanKashan Ali KhanNo ratings yet
- PTEG Spoken OfficialSampleTest L5 17mar11Document8 pagesPTEG Spoken OfficialSampleTest L5 17mar11Katia LeliakhNo ratings yet
- Meyer and Zack KM CycleDocument16 pagesMeyer and Zack KM Cyclemohdasriomar84No ratings yet
- Defence QuestionnaireDocument2 pagesDefence QuestionnaireSumitt SinghNo ratings yet
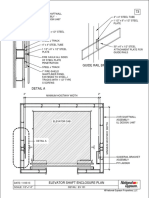
- Guide Rail Bracket AssemblyDocument1 pageGuide Rail Bracket AssemblyPrasanth VarrierNo ratings yet
- Pinto pm5 Tif 02Document24 pagesPinto pm5 Tif 02Salem BawazirNo ratings yet
- Araldite 2020 + XW 396 - XW 397Document6 pagesAraldite 2020 + XW 396 - XW 397Paul Dan OctavianNo ratings yet
- What Is An InfographicDocument4 pagesWhat Is An InfographicAryaaaNo ratings yet
- Surge Protection Devices GuidesDocument167 pagesSurge Protection Devices GuidessultanprinceNo ratings yet
- Aui2601 Exam Pack 2016 1Document57 pagesAui2601 Exam Pack 2016 1ricara alexia moodleyNo ratings yet
- Industrial Training ReportDocument19 pagesIndustrial Training ReportKapil Prajapati33% (3)
- Zoomlion Gulf FZE Introduction: 1.1 ME Service Support 1.2 Construction CasesDocument13 pagesZoomlion Gulf FZE Introduction: 1.1 ME Service Support 1.2 Construction CasesArk TradingNo ratings yet
- Grammar and Oral Language Development (GOLD) : Reported By: Melyn A. Bacolcol Kate Batac Julie Ann OcampoDocument17 pagesGrammar and Oral Language Development (GOLD) : Reported By: Melyn A. Bacolcol Kate Batac Julie Ann Ocampoclara dupitasNo ratings yet
- Statement 1680409132566Document11 pagesStatement 1680409132566úméshNo ratings yet
- Macro Economics A2 Level Notes Book PDFDocument33 pagesMacro Economics A2 Level Notes Book PDFMustafa Bilal50% (2)
- OD - SAP Connector UtilityDocument22 pagesOD - SAP Connector UtilityShivani SharmaNo ratings yet
- Financial/ Accounting Ratios: Sebi Grade A & Rbi Grade BDocument10 pagesFinancial/ Accounting Ratios: Sebi Grade A & Rbi Grade Bneevedita tiwariNo ratings yet
- Nodal Mesh AnalysisDocument20 pagesNodal Mesh Analysisjaspreet964No ratings yet
- Reflection Frog 1Document3 pagesReflection Frog 1mariamNo ratings yet