You might also like
- Vectors: Topic 37: Coordinate Systems and Coordinate TransformationsDocument12 pagesVectors: Topic 37: Coordinate Systems and Coordinate Transformationscloud_012No ratings yet
- C1 Sec 3Document11 pagesC1 Sec 3NombuleloNo ratings yet
- K01603 - 20190413172609 - Lecture Note - Chapter 3 PDFDocument32 pagesK01603 - 20190413172609 - Lecture Note - Chapter 3 PDFSHARIFAH NUR ARISHIA WAN HAZAMINo ratings yet
- Article 31Document16 pagesArticle 31TamathNo ratings yet
- Homework 3: Lifting Cylinder Calculator: TaskDocument3 pagesHomework 3: Lifting Cylinder Calculator: Taskalexander king'ooNo ratings yet
- Truss MathematicsDocument8 pagesTruss MathematicsOladunni Afolabi100% (1)
- AHRS LabDocument12 pagesAHRS Labjoshimeet479No ratings yet
- Getting Help: Example: Look For A Function To Take The Inverse of A Matrix. Try Commands "HelpDocument24 pagesGetting Help: Example: Look For A Function To Take The Inverse of A Matrix. Try Commands "Helpsherry mughalNo ratings yet
- CrystalStructure Handout2 1Document12 pagesCrystalStructure Handout2 1Ali hassanNo ratings yet
- Tutorial 1 MultivariableDocument1 pageTutorial 1 MultivariableAliNo ratings yet
- Computer Graphics and Visualization 18CS62: Name: Karthik J USN: 1AY18CS047Document12 pagesComputer Graphics and Visualization 18CS62: Name: Karthik J USN: 1AY18CS047Karthik SachinNo ratings yet
- 9.triple Integrals - MatlabDocument9 pages9.triple Integrals - Matlabsamspamz946No ratings yet
- 3d Plotting Presentation-V3Document23 pages3d Plotting Presentation-V3Trung Nam NguyễnNo ratings yet
- Activity 6.2.1 The Wrapping Function: Activity 6.2.1 Connecticut Core Algebra 2 Curriculum Version 3.0Document6 pagesActivity 6.2.1 The Wrapping Function: Activity 6.2.1 Connecticut Core Algebra 2 Curriculum Version 3.0Ric Joseph MurilloNo ratings yet
- PS2 Lab ManualDocument37 pagesPS2 Lab ManualFariha shaikhNo ratings yet
- R - MatricesDocument4 pagesR - MatricesVaclav TehleNo ratings yet
- Chapter 01-: Vector AnalysisDocument15 pagesChapter 01-: Vector AnalysisAnh LeNo ratings yet
- C 1 Quadratic InterpolationDocument18 pagesC 1 Quadratic InterpolationSukuje Je100% (1)
- Lecture 2 - Coordinate SystemsDocument14 pagesLecture 2 - Coordinate SystemsNicNo ratings yet
- An1 Derivat - Ro BE 2 71 Mathematical AspectsDocument8 pagesAn1 Derivat - Ro BE 2 71 Mathematical Aspectsvlad_ch93No ratings yet
- The Matlab LanguageDocument30 pagesThe Matlab LanguageShubham GargNo ratings yet
- Series de PuseuixDocument13 pagesSeries de PuseuixGabrielBenícioNo ratings yet
- Capitulo3 Gillat PDFDocument8 pagesCapitulo3 Gillat PDFluis fernando riojas pecheNo ratings yet
- Hmwk01 APAM4300Document14 pagesHmwk01 APAM4300Renzo Alexander Montoya MoralesNo ratings yet
- Robotics and Automation ME-465 Lec 3: Dr. Sara AliDocument58 pagesRobotics and Automation ME-465 Lec 3: Dr. Sara Alimuhammad usamaNo ratings yet
- Computer GraphicsDocument16 pagesComputer GraphicsSubbu SspNo ratings yet
- Chapter 3Document32 pagesChapter 3LEE LEE LAUNo ratings yet
- W11L2Document10 pagesW11L2Venkat ReddiNo ratings yet
- ME681A - Home Assignment-2Document2 pagesME681A - Home Assignment-2tanujg21No ratings yet
- Summary of MATLAB CommandsDocument3 pagesSummary of MATLAB CommandsQuazar001No ratings yet
- Pdf&rendition 1Document6 pagesPdf&rendition 1Priyanka ChauhanNo ratings yet
- Transmission Lines: Topic 56: Characteristic ImpedanceDocument10 pagesTransmission Lines: Topic 56: Characteristic ImpedanceRenesiy Marco NovillaNo ratings yet
- Mathematica Manual: Notebook 16: Multiple IntegralsDocument6 pagesMathematica Manual: Notebook 16: Multiple IntegralsadadanNo ratings yet
- Common Matlab Commands and FunctionsDocument5 pagesCommon Matlab Commands and FunctionsrosieNo ratings yet
- Three Dimensional Object RepresentationDocument46 pagesThree Dimensional Object Representationfelipecarvalho.bio8427No ratings yet
- AOE 5104 Assignment 6 Solution: GroundDocument7 pagesAOE 5104 Assignment 6 Solution: GroundHossam T BadranNo ratings yet
- 9 State Variable Approach (Continuous Systems) : AdvantagesDocument76 pages9 State Variable Approach (Continuous Systems) : AdvantagesNina ButtNo ratings yet
- Fast Inverse Square RootDocument8 pagesFast Inverse Square RootMaxminlevelNo ratings yet
- Laboratory Exercise #1Document10 pagesLaboratory Exercise #1Teki ChweNo ratings yet
- Optik Optik: OpticsDocument7 pagesOptik Optik: OpticsabhayNo ratings yet
- Homework 1 Tarea 1Document11 pagesHomework 1 Tarea 1Anette Wendy Quipo Kancha100% (1)
- Four Write Answers in This Quest Paper Itself, Start A New Page For Each QuestionDocument26 pagesFour Write Answers in This Quest Paper Itself, Start A New Page For Each QuestionDebjit KanrarNo ratings yet
- Transformed E&M I Homework Curvilinear Coordinates: (Griffiths Chapter 1)Document10 pagesTransformed E&M I Homework Curvilinear Coordinates: (Griffiths Chapter 1)Abdul RajakNo ratings yet
- Computer Applications in Engineering Design: Introductory LectureDocument49 pagesComputer Applications in Engineering Design: Introductory Lecturezain aiNo ratings yet
- CE 204: Solid Mechanics: Homework I: Instructor: Dr. Narayan Sundaram August 21, 2019Document2 pagesCE 204: Solid Mechanics: Homework I: Instructor: Dr. Narayan Sundaram August 21, 2019Shakir TarrayNo ratings yet
- 10.2478 Amns.2021.1.00075Document10 pages10.2478 Amns.2021.1.00075Văn CaoNo ratings yet
- Match Former WangDocument7 pagesMatch Former WangDouglas HonórioNo ratings yet
- Space CurvesDocument20 pagesSpace CurvesРЕКА ХОАНГNo ratings yet
- Anna's AssignmentDocument16 pagesAnna's Assignmenttumaini murrayNo ratings yet
- Motion of A Spinning Top: Quaternion AlgebraDocument11 pagesMotion of A Spinning Top: Quaternion AlgebraXàîñï ChÔhàñNo ratings yet
- Tikz PDFDocument12 pagesTikz PDFLuis Humberto Martinez PalmethNo ratings yet
- DerivativeDocument38 pagesDerivativeEladio LagosNo ratings yet
- 747 ProjectDocument9 pages747 ProjectYvan PierreNo ratings yet
- Theory of Elasticity Chapter 1Document15 pagesTheory of Elasticity Chapter 1nick10686No ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Wavelets: Algorithms and ApplicationsDocument50 pagesWavelets: Algorithms and ApplicationsAdan CarbajalNo ratings yet
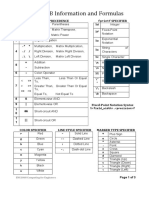
- MATLAB Information and Formulas: Operator Precedence Fprintf SPECIFIERDocument3 pagesMATLAB Information and Formulas: Operator Precedence Fprintf SPECIFIEROmar El MasryNo ratings yet
- Functions of Matrices Theory and Computation TQW - Darksiderg PDFDocument446 pagesFunctions of Matrices Theory and Computation TQW - Darksiderg PDFandrespbz100% (2)
- Me 6603 - Finite Element Analysis: Part A Questions With Answers Unit 1Document14 pagesMe 6603 - Finite Element Analysis: Part A Questions With Answers Unit 1Karthik SubramaniNo ratings yet
- Bridge Course in MathematicsDocument3 pagesBridge Course in MathematicsUday Shanker ReddyNo ratings yet
- Matrix Pencil 01Document11 pagesMatrix Pencil 01David Ihab NaderNo ratings yet
- Nonlinear Microwave and RF Circuits - Stephen - A - Mass PDFDocument13 pagesNonlinear Microwave and RF Circuits - Stephen - A - Mass PDFAnonymous 1czlPyNo ratings yet
- 1 Euler, Hamilton and Five Classical Puzzles: August 23, 2019Document20 pages1 Euler, Hamilton and Five Classical Puzzles: August 23, 2019JuanFonsecaNo ratings yet
- Multiple Choice Question 1 Q.No. AnswerDocument2 pagesMultiple Choice Question 1 Q.No. Answerjames_imchNo ratings yet
- Matcont: ACM Transactions On Mathematical Software June 2003Document25 pagesMatcont: ACM Transactions On Mathematical Software June 2003Talaslıoğlu HoldingNo ratings yet
- Diff ManDocument75 pagesDiff Mank_gh22No ratings yet
- BCA603T Cryptography and Network Security: Unit - I ContentsDocument42 pagesBCA603T Cryptography and Network Security: Unit - I Contentscare proNo ratings yet
- CODE - BRIGHT Numerical FormulationDocument26 pagesCODE - BRIGHT Numerical FormulationJonathan TeixeiraNo ratings yet
- Arduino 8×8 LED MatrixDocument6 pagesArduino 8×8 LED MatrixYassir ButtNo ratings yet
- Timothy A - Barton Steven T. Smith: Structured Covariance Estimation For Space-Time Adaptive ProcessingDocument4 pagesTimothy A - Barton Steven T. Smith: Structured Covariance Estimation For Space-Time Adaptive ProcessingAhmed HussainNo ratings yet
- Quantitative AnalysisDocument366 pagesQuantitative AnalysisLazarus AmaniNo ratings yet
- FEM ExercisesDocument23 pagesFEM ExercisesVenkatesh Sathya HarisyamNo ratings yet
- Math Review Topics CXC 3Document14 pagesMath Review Topics CXC 3tihanna.celestineNo ratings yet
- Linear Algebra: JstheDocument20 pagesLinear Algebra: JstheSaiganesh RameshNo ratings yet
- Age Calculation Shortcut TricksDocument2 pagesAge Calculation Shortcut Tricksranaharsh772No ratings yet
- Matrices & DeterminantsDocument39 pagesMatrices & DeterminantsDilruk GallageNo ratings yet
- KKP Mte 3110 - 3Document56 pagesKKP Mte 3110 - 3Siti Khirnie KasbolahNo ratings yet
- Determinant Determinant of A 2x2 Matrix: A B C DDocument10 pagesDeterminant Determinant of A 2x2 Matrix: A B C DfadeevpopovNo ratings yet
- Allowed Inside The Examination Hall. Follow Proper Numbering For Answering The QuestionsDocument3 pagesAllowed Inside The Examination Hall. Follow Proper Numbering For Answering The QuestionsDevenderNo ratings yet
- Brigo Morini LMMDocument40 pagesBrigo Morini LMMrasmaheeNo ratings yet
- Unit 5. Finite Element AnalysisDocument48 pagesUnit 5. Finite Element AnalysiskalpeshavgifyNo ratings yet
- Control Systems: Basil HamedDocument71 pagesControl Systems: Basil Hamedkhaled jNo ratings yet
- Python Cheatsheets DsDocument11 pagesPython Cheatsheets DsRasib WaseetNo ratings yet
- Finite Element Method in Structural MechanicsDocument5 pagesFinite Element Method in Structural MechanicsPaolo GoducoNo ratings yet
- Yuval Peres - MarkovChains and Mixing TimesDocument388 pagesYuval Peres - MarkovChains and Mixing TimesLaura RibasNo ratings yet