You might also like
- Arctic Cat 2005 Snowmobile Service Manual All ModelsDocument815 pagesArctic Cat 2005 Snowmobile Service Manual All ModelsWilliam Condie100% (3)
- Audi Q3 Brochure UK VersionDocument52 pagesAudi Q3 Brochure UK VersionWes Crow100% (1)
- Lightpad MibDocument29 pagesLightpad MibsussusinhaNo ratings yet
- Ansys Chapter 13Document22 pagesAnsys Chapter 13Tran Van TienNo ratings yet
- Chapter 13 Non Linear SimulationsDocument21 pagesChapter 13 Non Linear SimulationsjosephNo ratings yet
- Chapter 13Document21 pagesChapter 13mafevi90No ratings yet
- Chapter13 PDFDocument22 pagesChapter13 PDFMahmoud Reda ElSherifNo ratings yet
- Machine Learning QuestionsDocument2 pagesMachine Learning QuestionsPriyaprasad PandaNo ratings yet
- Lecture 07 - Linear Regression - PlainDocument12 pagesLecture 07 - Linear Regression - PlainRajachandra VoodigaNo ratings yet
- 01a - Mathematical ModellingDocument21 pages01a - Mathematical ModellingMohamad Yusuf HelmiNo ratings yet
- Peak Force QNM - Adv Apps Training 2014Document60 pagesPeak Force QNM - Adv Apps Training 2014linhaowen13579No ratings yet
- Optimization For ML (2) : CS771: Introduction To Machine Learning Piyush RaiDocument14 pagesOptimization For ML (2) : CS771: Introduction To Machine Learning Piyush RaiRajaNo ratings yet
- Linear Regression: CS771: Introduction To Machine Learning NisheethDocument14 pagesLinear Regression: CS771: Introduction To Machine Learning NisheethRajaNo ratings yet
- CS771: Introduction To Machine Learning Piyush RaiDocument25 pagesCS771: Introduction To Machine Learning Piyush RaiRajachandra VoodigaNo ratings yet
- ME303 Wk02 Kinematics Load Determination PDFDocument23 pagesME303 Wk02 Kinematics Load Determination PDF许戎汉No ratings yet
- SoftComp 02Document33 pagesSoftComp 02Aditya RautNo ratings yet
- 0040 Contents NonLinear DetailedDocument53 pages0040 Contents NonLinear Detailedha heNo ratings yet
- Advanced Modal SVD PeriodicDocument44 pagesAdvanced Modal SVD PeriodicSouha BaliNo ratings yet
- Stats Tutorial - Instrumental Analysis and Calibration: Errors in The Regression EquationDocument4 pagesStats Tutorial - Instrumental Analysis and Calibration: Errors in The Regression EquationmariogonzalezquintasNo ratings yet
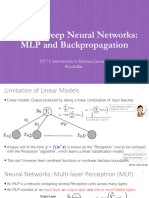
- Unit 3 - Diving - Deep - LearningDocument108 pagesUnit 3 - Diving - Deep - LearningAlekhya RoyNo ratings yet
- Interpolation Slides - EFTFDocument8 pagesInterpolation Slides - EFTFLachlan GroseNo ratings yet
- Week 7 PDocument122 pagesWeek 7 PCagri CindiogluNo ratings yet
- CS550 Regression Aug12Document63 pagesCS550 Regression Aug12dipsresearch100% (1)
- Lecture 21 and 22Document28 pagesLecture 21 and 22shivna0809No ratings yet
- Nays2DH Examples EnglishDocument44 pagesNays2DH Examples EnglishPiere Christofer Salas HerreraNo ratings yet
- Linear RegressionDocument14 pagesLinear RegressionALINA SOYNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Thomas CalculusDocument453 pagesThomas CalculusDushyant Gupta100% (1)
- Convolutional Neural Networks (Part I)Document61 pagesConvolutional Neural Networks (Part I)Shahrullohon LutfillohonovNo ratings yet
- Image Deformation Using Moving Least SquaresDocument8 pagesImage Deformation Using Moving Least SquaresBui Minh TuanNo ratings yet
- Lab 2Document35 pagesLab 2Mohammed MustafaNo ratings yet
- ANSYS Mechanical Introduction To Structural Nonlinearities: General ProceduresDocument41 pagesANSYS Mechanical Introduction To Structural Nonlinearities: General ProceduresluchotevesNo ratings yet
- AIML-Module-3-part 2Document122 pagesAIML-Module-3-part 2srujanmoilyNo ratings yet
- PerceptiLabs-ML HandbookDocument31 pagesPerceptiLabs-ML Handbookfx0neNo ratings yet
- Chapter 3 FLCDocument110 pagesChapter 3 FLCHafisIzranNo ratings yet
- TCD CS 2006 46Document10 pagesTCD CS 2006 46masterhacksNo ratings yet
- CS 3035 (ML) - CS - End - May - 2023Document11 pagesCS 3035 (ML) - CS - End - May - 2023Rachit SrivastavNo ratings yet
- Dynamic Response Characteristics of More Complicated ProcessesDocument38 pagesDynamic Response Characteristics of More Complicated Processeshakita86No ratings yet
- 4 - Mech - BNL - 14.0 - L02-ProcedureDocument41 pages4 - Mech - BNL - 14.0 - L02-Procedureandreazevedo.caNo ratings yet
- Linear RegressionDocument8 pagesLinear RegressionParthraj SolankiNo ratings yet
- 006-Multiple Layers DNNDocument26 pages006-Multiple Layers DNNOmkar AkulwarNo ratings yet
- An Eigenvalue Problem: Modal Analysis - Lesson 3Document9 pagesAn Eigenvalue Problem: Modal Analysis - Lesson 3Horia PetrescuNo ratings yet
- AI Lec-06Document30 pagesAI Lec-06hwangzang.nguyenkhacNo ratings yet
- 223 EE3117 DIC Lab1 Eng Updated 11202023Document10 pages223 EE3117 DIC Lab1 Eng Updated 11202023DUY VĂN BÁNo ratings yet
- Bauer Redwood 1987 Yield Line C&sDocument10 pagesBauer Redwood 1987 Yield Line C&sIsmail DerbalNo ratings yet
- Stability Analysis of A Class of NonlinearDocument5 pagesStability Analysis of A Class of NonlinearsonabNo ratings yet
- 07 - 3D Slope StabilityDocument14 pages07 - 3D Slope StabilityREMIER100% (1)
- Deep Learning - DL-2Document44 pagesDeep Learning - DL-2Hasnain AhmadNo ratings yet
- Manda Rake Osman IDocument11 pagesManda Rake Osman ICanan DönmezNo ratings yet
- Module1Document124 pagesModule1rajaNo ratings yet
- DSC 190 Final ReportDocument10 pagesDSC 190 Final ReportHườngNo ratings yet
- Activation FunctionDocument31 pagesActivation FunctionAnkur SharmaNo ratings yet
- Adaptive Neuro Fuzzy ControlDocument4 pagesAdaptive Neuro Fuzzy ControlEga PramNo ratings yet
- Mixte Integer Linear Programming (MILP)Document11 pagesMixte Integer Linear Programming (MILP)Aida AdylbekovaNo ratings yet
- Submodular Set FunctionDocument7 pagesSubmodular Set Functionjoseph676No ratings yet
- LECTURE PLAN: Core Classes Mathematics: Class-XII 2021-22Document1 pageLECTURE PLAN: Core Classes Mathematics: Class-XII 2021-22arya ytNo ratings yet
- Wavelet and Curvelet Transform Based Image Fusion Algorithm: Shriniwas T. BudhewarDocument5 pagesWavelet and Curvelet Transform Based Image Fusion Algorithm: Shriniwas T. BudhewarRudresh RakeshNo ratings yet
- Name: P. Revathi Department: ECE Designation: Asst. Professor Title: Behavioural Level ModellingDocument69 pagesName: P. Revathi Department: ECE Designation: Asst. Professor Title: Behavioural Level ModellingCHINTADA MADHUSUDHANA RAONo ratings yet
- Tutoriales 1 y 2Document44 pagesTutoriales 1 y 2Gabriela Fonseca cruzNo ratings yet
- Lecture 4Document33 pagesLecture 4Venkat ram ReddyNo ratings yet
- 2023 GCE O Level Add Math 4049 P2 (Possible Topics)Document2 pages2023 GCE O Level Add Math 4049 P2 (Possible Topics)ko2686284No ratings yet
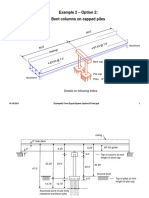
- Example2 Two Equal Spans Option2 FinalDocument178 pagesExample2 Two Equal Spans Option2 FinalSony JsdNo ratings yet
- P13 Aditya Sharma BoxDocument10 pagesP13 Aditya Sharma BoxSony JsdNo ratings yet
- P9 Alok BhowmickDocument20 pagesP9 Alok BhowmickSony JsdNo ratings yet
- Code of Practice For Concrete Road Bridges Irc:112: Workshop OnDocument10 pagesCode of Practice For Concrete Road Bridges Irc:112: Workshop OnSony JsdNo ratings yet
- Code of Practice For Concrete Road Bridges IRC:112: Case Study 1 - Design of I GirderDocument15 pagesCode of Practice For Concrete Road Bridges IRC:112: Case Study 1 - Design of I GirderSony JsdNo ratings yet
- Code of Practice For Concrete Road Bridges Irc:112: ULS For Linear ElementsDocument6 pagesCode of Practice For Concrete Road Bridges Irc:112: ULS For Linear ElementsSony JsdNo ratings yet
- P6 Vinay GuptaDocument8 pagesP6 Vinay GuptaSony JsdNo ratings yet
- P8 Alok BhowmickDocument15 pagesP8 Alok BhowmickSony JsdNo ratings yet
- P10 AK MullickDocument11 pagesP10 AK MullickSony JsdNo ratings yet
- LUSAS Technical Material - 2Document34 pagesLUSAS Technical Material - 2Sony Jsd100% (1)
- P2 H SubbaraoDocument11 pagesP2 H SubbaraoSony JsdNo ratings yet
- P1 H Subbarao PDFDocument4 pagesP1 H Subbarao PDFSony JsdNo ratings yet
- Existing Bridge: Code of Practice For Concrete Road Bridges IRC:112Document5 pagesExisting Bridge: Code of Practice For Concrete Road Bridges IRC:112Sony JsdNo ratings yet
- Prologue To Presentation: Code of Practice For Concrete Road Bridges IRC:112Document9 pagesPrologue To Presentation: Code of Practice For Concrete Road Bridges IRC:112Sony JsdNo ratings yet
- P4 DA Bhide PDFDocument6 pagesP4 DA Bhide PDFSony JsdNo ratings yet
- GJ Strand Cable System Introduction (2015)Document41 pagesGJ Strand Cable System Introduction (2015)Sony JsdNo ratings yet
- Workshop 3 Tosca - Shape Optimization: PreliminariesDocument13 pagesWorkshop 3 Tosca - Shape Optimization: PreliminariesSony JsdNo ratings yet
- C8h0vm0000czwmci PDFDocument319 pagesC8h0vm0000czwmci PDFSony JsdNo ratings yet
- AcademicWorkshopOne Abaqus FinalDocument29 pagesAcademicWorkshopOne Abaqus FinalSony JsdNo ratings yet
- Modeling Pre and Post Tensioned Concrete: 14 International LS-DYNA Users ConferenceDocument22 pagesModeling Pre and Post Tensioned Concrete: 14 International LS-DYNA Users ConferenceSony JsdNo ratings yet
- Extraordinary Gazette Date: 30/05//2017 Last Date: 05/07/2017 Category No: 151/2017 and 152/2017Document3 pagesExtraordinary Gazette Date: 30/05//2017 Last Date: 05/07/2017 Category No: 151/2017 and 152/2017Sony JsdNo ratings yet
- ThesisDocument172 pagesThesisSony JsdNo ratings yet
- Spectrum Organisation Profile-PictorialDocument80 pagesSpectrum Organisation Profile-PictorialSony JsdNo ratings yet
- Chapter09 PDFDocument13 pagesChapter09 PDFSony JsdNo ratings yet
- Name: Sagar Kapoor ROLL NUMBER: 7114233721 Class: Bca 6 Sem, Sec C 'Document12 pagesName: Sagar Kapoor ROLL NUMBER: 7114233721 Class: Bca 6 Sem, Sec C 'Sagar KapoorNo ratings yet
- The Information Practitioner - Balaji BalagurusamiDocument3 pagesThe Information Practitioner - Balaji BalagurusamiBalajiNo ratings yet
- User Manual: For The Light Weight Deflectometer (LWD) ZFG 3.0Document32 pagesUser Manual: For The Light Weight Deflectometer (LWD) ZFG 3.0Leonardo Acosta NeiraNo ratings yet
- Topex VoibridgeDocument36 pagesTopex VoibridgeFitim IsmailiNo ratings yet
- LG HT953TV - User Manual enDocument24 pagesLG HT953TV - User Manual engondifNo ratings yet
- Cafe Basudara MenuDocument7 pagesCafe Basudara Menupkmperawatanpelauw 5No ratings yet
- Tokita Et Al 2017 Morphometric and Adaptive RadiationDocument17 pagesTokita Et Al 2017 Morphometric and Adaptive RadiationHugoBenitezdNo ratings yet
- VMware VCenter/ESX/ESXi User Snapshot Reminder ScriptDocument7 pagesVMware VCenter/ESX/ESXi User Snapshot Reminder ScriptSli CliNo ratings yet
- Advanced Grammar - Cae - CpeDocument105 pagesAdvanced Grammar - Cae - CpeabcgfNo ratings yet
- BKS Unit II-Synthesized and Inherited AtributesDocument14 pagesBKS Unit II-Synthesized and Inherited AtributesShivam ChauhanNo ratings yet
- Machine Learning For Stock Prediction Based On Fundamental AnalysDocument11 pagesMachine Learning For Stock Prediction Based On Fundamental AnalysZeitun NoorNo ratings yet
- Introducing The Open Banking StandardDocument12 pagesIntroducing The Open Banking StandardOpen Data Institute96% (25)
- Analysis of JewelryDocument16 pagesAnalysis of JewelryadinadhNo ratings yet
- Aaf2l Project 1 WRDocument6 pagesAaf2l Project 1 WRWalterNo ratings yet
- 5 - Storage Cloud ServicesDocument63 pages5 - Storage Cloud ServicesSWR AutomaçãoNo ratings yet
- Book Review:: Pedro Domingos. Basic Books. 2015. ISBN 978-0465065707Document2 pagesBook Review:: Pedro Domingos. Basic Books. 2015. ISBN 978-0465065707Anurag GuptaNo ratings yet
- 76882a62-75b6-43e8-8ff1-86986a5a42d8Document1 page76882a62-75b6-43e8-8ff1-86986a5a42d8Param DaveNo ratings yet
- AST 0136262 IDC Report The ROI of Worksoft SolutionsDocument18 pagesAST 0136262 IDC Report The ROI of Worksoft SolutionstemozNo ratings yet
- Tutorial Allplan BasicsDocument186 pagesTutorial Allplan BasicsEszter SándorNo ratings yet
- A Single-Loop Method For Reliability-Based DesignDocument17 pagesA Single-Loop Method For Reliability-Based Designlunur05tiNo ratings yet
- Footstep GeneratorDocument56 pagesFootstep GeneratorSepyoNo ratings yet
- The Logic of Causation: Definition, Induction and Deduction of Deterministic Causality.Document384 pagesThe Logic of Causation: Definition, Induction and Deduction of Deterministic Causality.Avi Sion100% (2)
- Terminal Date Sheet-Fall21Document7 pagesTerminal Date Sheet-Fall21Tayyab ShahzadNo ratings yet
- 3A Ultra Low Dropout Linear Regulator: General Description FeaturesDocument11 pages3A Ultra Low Dropout Linear Regulator: General Description FeaturesdejanNo ratings yet
- Regulations For The Examinations For The Fellowship of The Royal College of Radiologists in Clinical OncologyDocument3 pagesRegulations For The Examinations For The Fellowship of The Royal College of Radiologists in Clinical OncologyJoshua JayakaranNo ratings yet
- Red Hat Enterprise Linux-5-5.8 Technical Notes-en-USDocument510 pagesRed Hat Enterprise Linux-5-5.8 Technical Notes-en-USeusphorusNo ratings yet
- RN362 Digital Maturity Model Release Notes R17.0.1Document24 pagesRN362 Digital Maturity Model Release Notes R17.0.1deepak_sachdeva8150% (2)