You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Symmetrical ComponentsDocument76 pagesSymmetrical ComponentsrdelgranadoNo ratings yet
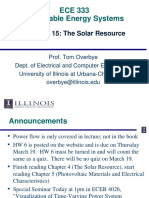
- ECE333 Renewable Energy Systems 2015 Lect15Document38 pagesECE333 Renewable Energy Systems 2015 Lect15rdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect13pDocument32 pagesECE333 Renewable Energy Systems 2015 Lect13prdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect14Document43 pagesECE333 Renewable Energy Systems 2015 Lect14rdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect16Document39 pagesECE333 Renewable Energy Systems 2015 Lect16rdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect12Document30 pagesECE333 Renewable Energy Systems 2015 Lect12rdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect8Document28 pagesECE333 Renewable Energy Systems 2015 Lect8rdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect9Document35 pagesECE333 Renewable Energy Systems 2015 Lect9rdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect2Document32 pagesECE333 Renewable Energy Systems 2015 Lect2rdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect10Document30 pagesECE333 Renewable Energy Systems 2015 Lect10rdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect7Document43 pagesECE333 Renewable Energy Systems 2015 Lect7rdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect6Document30 pagesECE333 Renewable Energy Systems 2015 Lect6rdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect5Document39 pagesECE333 Renewable Energy Systems 2015 Lect5rdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect4Document35 pagesECE333 Renewable Energy Systems 2015 Lect4rdelgranadoNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect3Document31 pagesECE333 Renewable Energy Systems 2015 Lect3rdelgranadoNo ratings yet
- Tutorial Presentation LongattDocument119 pagesTutorial Presentation LongattrdelgranadoNo ratings yet
- Bus ProtectionDocument46 pagesBus ProtectionrdelgranadoNo ratings yet
- Power Engineering Guide Edition 7 1Document542 pagesPower Engineering Guide Edition 7 1Abhishek Kumar100% (1)
- SKM Power Tools: The Leader in Electrical Engineering SoftwareDocument6 pagesSKM Power Tools: The Leader in Electrical Engineering SoftwarerdelgranadoNo ratings yet
- Distribution Device Coordination: Mike Diedesch & Kevin Damron - Avista UtilitiesDocument60 pagesDistribution Device Coordination: Mike Diedesch & Kevin Damron - Avista UtilitiesrdelgranadoNo ratings yet
- Ch24 DynModelsDocument155 pagesCh24 DynModelselectrical_1012000No ratings yet
- Controllers-Standard AVR EXITERS TODOS SiemensDocument65 pagesControllers-Standard AVR EXITERS TODOS SiemensrdelgranadoNo ratings yet
- CIRE Training Calendar 2017-18Document36 pagesCIRE Training Calendar 2017-18rdelgranadoNo ratings yet
- 15kw - SN College - SLDDocument1 page15kw - SN College - SLDmebin k XavierNo ratings yet
- Compare ISO 9001 AS9100cDocument1 pageCompare ISO 9001 AS9100cViswanathan Srk100% (1)
- Performance Improvement of Alternators With SwitchDocument9 pagesPerformance Improvement of Alternators With SwitchfatihNo ratings yet
- Pe 001Document216 pagesPe 001erivan bernardoNo ratings yet
- CalderaDocument56 pagesCalderaEsteban TapiaNo ratings yet
- Lab ManualDocument10 pagesLab ManualtheNo ratings yet
- Sustainable Finance Esg Integration SolutionDocument5 pagesSustainable Finance Esg Integration SolutionRISHABH RAJ JAINNo ratings yet
- 10ECL47 MICROCONTROLLER Lab ManualDocument142 pages10ECL47 MICROCONTROLLER Lab ManualVishalakshi B HiremaniNo ratings yet
- Blue Eyes Technology ReportDocument31 pagesBlue Eyes Technology ReportShubham Chauhan S.No ratings yet
- OXO Connect 3.2 SD HardwarePlatformandInterfaces 8AL91201USAH 1 enDocument160 pagesOXO Connect 3.2 SD HardwarePlatformandInterfaces 8AL91201USAH 1 enEduardo SilvaNo ratings yet
- Digital Marketing Batch 8Document25 pagesDigital Marketing Batch 8Imron MashuriNo ratings yet
- Cognitive API Using Neural NetworkDocument30 pagesCognitive API Using Neural NetworkAnish SNo ratings yet
- S4 Analytics OptionsDocument6 pagesS4 Analytics Optionsnewkaox2009No ratings yet
- 德勤 - 数字化精益制造工业4.0技术改变了精益流程,从而推动企业发展 -DI Digital Lean DSNDocument20 pages德勤 - 数字化精益制造工业4.0技术改变了精益流程,从而推动企业发展 -DI Digital Lean DSNxiao pengNo ratings yet
- Product Data Sheet: Gypframe® MF5 Ceiling SectionDocument2 pagesProduct Data Sheet: Gypframe® MF5 Ceiling SectionJanna BakeerNo ratings yet
- Pa0043 Sub Conor O'donnell PDFDocument7 pagesPa0043 Sub Conor O'donnell PDFTheNewChildrensHospitalNo ratings yet
- Smart™ Sensors: Tilted Element™ Thru-HullDocument2 pagesSmart™ Sensors: Tilted Element™ Thru-HullDannerNo ratings yet
- Kiln Shell Laser ManualDocument19 pagesKiln Shell Laser Manualบิ๊ก บิ๊กNo ratings yet
- Differences Between Shunt Reactor and Power TransformerDocument4 pagesDifferences Between Shunt Reactor and Power TransformerUalahMakjanNo ratings yet
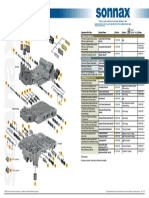
- Aisin AW TF-81SC: Click On Part Numbers For Product Details or VisitDocument1 pageAisin AW TF-81SC: Click On Part Numbers For Product Details or Visittejonmx100% (1)
- Biomedical 7-8Document20 pagesBiomedical 7-8முத்துலிங்கம். பால்ராஜ்No ratings yet
- FBS ProfileDocument10 pagesFBS ProfilePrashant VahulrajeNo ratings yet
- Guide To Computer Forensics InvestigationDocument65 pagesGuide To Computer Forensics InvestigationAnthony WilsonNo ratings yet
- Working Together ApartDocument8 pagesWorking Together ApartIzo SeremNo ratings yet
- ScrewbnDocument15 pagesScrewbnDeepika-deepix AroraNo ratings yet
- Genset Canopy DesignDocument10 pagesGenset Canopy DesignNick JohnsonnNo ratings yet
- Hospital Equipment and Its Management System A MinDocument4 pagesHospital Equipment and Its Management System A MinPaola LorenzattoNo ratings yet
- Experiment # 1: MATLAB Basics For Communication System Design ObjectiveDocument19 pagesExperiment # 1: MATLAB Basics For Communication System Design ObjectiveSyed F. JNo ratings yet
- Comsol PricelistDocument4 pagesComsol PricelistKalipada SenNo ratings yet
- Nvidia DGX Os 4 Server: Software Release NotesDocument19 pagesNvidia DGX Os 4 Server: Software Release Notesloreto07No ratings yet