You might also like
- STM32F103C8T6 Schematic DiagramDocument1 pageSTM32F103C8T6 Schematic Diagrammurillo_bvNo ratings yet
- MB1134 PDFDocument3 pagesMB1134 PDFdsfasfasfNo ratings yet
- Ppi 82c55a Interfacing PDFDocument59 pagesPpi 82c55a Interfacing PDFJesús Murio Por TiNo ratings yet
- Afisaj PDFDocument1 pageAfisaj PDFAnonymous STB5LhKSwkNo ratings yet
- Interfacing ADC 0809 With 8051 TrainerDocument9 pagesInterfacing ADC 0809 With 8051 TrainerSoumyabrataPatraNo ratings yet
- Mikromedia stm32 PinoutDocument2 pagesMikromedia stm32 PinoutjoseiutNo ratings yet
- 8-2-24 Progress CWT & RWT 1&2Document2 pages8-2-24 Progress CWT & RWT 1&2zuhasgdNo ratings yet
- CortexM4 ProcessorBoard v2 20Document6 pagesCortexM4 ProcessorBoard v2 20Ramón JaramilloNo ratings yet
- MB1180 PDFDocument3 pagesMB1180 PDFAli ShanNo ratings yet
- Paq10d Paq10d: Paq20d Paq30d Paq20d Paq30dDocument1 pagePaq10d Paq10d: Paq20d Paq30d Paq20d Paq30dtitanium7No ratings yet
- UARTDocument1 pageUARTHieu LeNo ratings yet
- Presentation 1Document6 pagesPresentation 1Gilang Anugerah HernandaNo ratings yet
- Connections For Supported MMDVM BoardsDocument1 pageConnections For Supported MMDVM BoardsFABIANNo ratings yet
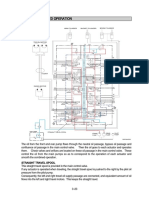
- Group 4 Single OperationDocument12 pagesGroup 4 Single OperationАлександр ПанкратовNo ratings yet
- Regular Plays 2010bDocument26 pagesRegular Plays 2010bDanDan_XPNo ratings yet
- Schematic - TDA7294 Bridge Stereo Copy - 2021-05-28Document1 pageSchematic - TDA7294 Bridge Stereo Copy - 2021-05-28memepiNo ratings yet
- PYBv10b Metric DimensionsDocument1 pagePYBv10b Metric DimensionsAndy ChanNo ratings yet
- Group 5 Combined Operation: 1. OutlineDocument8 pagesGroup 5 Combined Operation: 1. OutlineАлександр ПанкратовNo ratings yet
- Group 5 Combined OperationDocument8 pagesGroup 5 Combined OperationHector Renzo Zarate RodriguezNo ratings yet
- Group 5 Combined Operation: 1. OutlineDocument9 pagesGroup 5 Combined Operation: 1. OutlineالمهندسوليدالطويلNo ratings yet
- 3-4 - Operação SimplesDocument10 pages3-4 - Operação SimplesLuis BertaoNo ratings yet
- 3-5 Sistema Hidraulico Operacion CombinadaDocument9 pages3-5 Sistema Hidraulico Operacion Combinadalevinton jose tobias genesNo ratings yet
- Schematic PrintsDocument1 pageSchematic PrintsemaNo ratings yet
- Panel Control Booster Pump Dol 1Document1 pagePanel Control Booster Pump Dol 1rizkyNo ratings yet
- Group 4 Single OperationDocument10 pagesGroup 4 Single OperationDeyvi Cconocuyca HuallparimachiNo ratings yet
- Group 5 Combined OperationDocument8 pagesGroup 5 Combined OperationАлексейNo ratings yet
- 4. عمليه واحدهDocument12 pages4. عمليه واحدهالمهندسوليدالطويلNo ratings yet
- Cps Tds Pe Stub Flanges and RingsDocument5 pagesCps Tds Pe Stub Flanges and Ringsaissa kittouNo ratings yet
- 8051 ApplicationsDocument5 pages8051 Applicationsgdreddy25No ratings yet
- MB1115 PDFDocument6 pagesMB1115 PDFAnwesha SwainNo ratings yet
- WIRING DIAGRAMS LHD 000201 To 057871 PDFDocument113 pagesWIRING DIAGRAMS LHD 000201 To 057871 PDFliviu axinteNo ratings yet
- Proyecto: Tacómetro Digital Con Sensor VR y MicrocontroladorDocument1 pageProyecto: Tacómetro Digital Con Sensor VR y MicrocontroladorLuis Álvarez JátivaNo ratings yet
- Stub Flanges & Backing Rings: Technical DataDocument5 pagesStub Flanges & Backing Rings: Technical Dataviki851No ratings yet
- Group 4 Single OperationDocument15 pagesGroup 4 Single OperationandresNo ratings yet
- Capac I MetreDocument1 pageCapac I MetreAlola ABLNo ratings yet
- Gecko ControllerDocument1 pageGecko ControllerBruce CollverNo ratings yet
- Products:arduino Uno:arduino Uno PinoutDocument1 pageProducts:arduino Uno:arduino Uno Pinoutİmran ÇAKSUNo ratings yet
- Pertemuan 1 Skematik Sistem MinimumDocument1 pagePertemuan 1 Skematik Sistem MinimumETC CLASSNo ratings yet
- Mikrokontroler Atmega Berbasis Codevision Avr (Adc Dan Aplikasi Termometer)Document16 pagesMikrokontroler Atmega Berbasis Codevision Avr (Adc Dan Aplikasi Termometer)okta jeryNo ratings yet
- Mega Sensor Shield V2.3 LayoutDocument1 pageMega Sensor Shield V2.3 LayoutBagasSamudraNo ratings yet
- Operacio r300-9Document10 pagesOperacio r300-9Alfonso BerRamNo ratings yet
- Group 5 Combined Operation: 1. OutlineDocument5 pagesGroup 5 Combined Operation: 1. OutlineandresNo ratings yet
- Group 5 Combined Operation: 1. OutlineDocument5 pagesGroup 5 Combined Operation: 1. OutlineandresNo ratings yet
- PLINTH G2 OEL-ModelDocument1 pagePLINTH G2 OEL-Modelhaad.malik007No ratings yet
- B.A. 3rd Year Result Sheet Regular and Backlog Aug 2021Document197 pagesB.A. 3rd Year Result Sheet Regular and Backlog Aug 2021Md NawazishNo ratings yet
- Esquema Hidráulico 160lcDocument12 pagesEsquema Hidráulico 160lcrodineiNo ratings yet
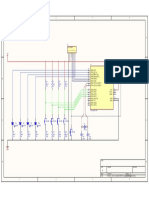
- En - mb997 F407VGT6 E01 SchematicDocument9 pagesEn - mb997 F407VGT6 E01 SchematicBharath Kumar Reddy MNo ratings yet
- CX 210Document670 pagesCX 210Antonio BarberNo ratings yet
- Reparación SimpleDocument10 pagesReparación Simplelevinton jose tobias genesNo ratings yet
- S10 SW-SPST S11 SW-SPST 12 SW-SPST S13 SW-SPST S14 SW-SPST S15 SW-SPST S16 SW-SPST S17 SW-SPSTDocument1 pageS10 SW-SPST S11 SW-SPST 12 SW-SPST S13 SW-SPST S14 SW-SPST S15 SW-SPST S16 SW-SPST S17 SW-SPSTHieu LeNo ratings yet
- Corolla Altis 2008Document190 pagesCorolla Altis 2008manhNo ratings yet
- How To Handle DIGITAL Ports in ATmega8Document1 pageHow To Handle DIGITAL Ports in ATmega8AwadhNo ratings yet
- 140 KDocument15 pages140 KWillian BrucaloNo ratings yet
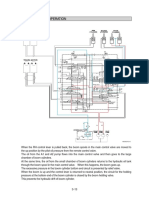
- Main Control Valve: Al5 Al4 Al3 Al2 Al1 Ar1 Ar2 Ar3 dR4Document1 pageMain Control Valve: Al5 Al4 Al3 Al2 Al1 Ar1 Ar2 Ar3 dR4Francisco Alvarado HuenquiaoNo ratings yet
- Renr3726renr3726e96882 PDFDocument1 pageRenr3726renr3726e96882 PDFFrancisco Alvarado Huenquiao100% (1)
- Kebutuhan Hardware 20.12.2022.akaDocument1 pageKebutuhan Hardware 20.12.2022.akadro gunawanNo ratings yet
- Jam Digital Sederhana 2.DSN Hitam PutihDocument1 pageJam Digital Sederhana 2.DSN Hitam PutihpisangmasakdibatangNo ratings yet
- Group 4 Single OperationDocument10 pagesGroup 4 Single OperationTaha RdmanNo ratings yet
- L322 09MY JOB1 VIN 263535 Onwards LHDDocument213 pagesL322 09MY JOB1 VIN 263535 Onwards LHDchi ma0% (1)
- 0901d19680090e01 SKF Bushings Thrust Washers and Strips 1 EN - TCM - 12 582374Document48 pages0901d19680090e01 SKF Bushings Thrust Washers and Strips 1 EN - TCM - 12 582374zbhp zNo ratings yet
- KLK, CD, DFDL DFL FDL DFL FDL KFDL FDLDocument1 pageKLK, CD, DFDL DFL FDL DFL FDL KFDL FDLzbhp zNo ratings yet
- Bglg44fggggffg KJBBLNLN LN !ù N!ùDocument1 pageBglg44fggggffg KJBBLNLN LN !ù N!ùzbhp zNo ratings yet
- 22Document1 page22zbhp zNo ratings yet
- 33Document1 page33zbhp zNo ratings yet
- BGLGFGGGGFFG KJBBLNLN LN !ù N!ùDocument1 pageBGLGFGGGGFFG KJBBLNLN LN !ù N!ùzbhp zNo ratings yet
- KLK, CD, DFDL DFL FDL DFL FDL KFDL FDLDocument1 pageKLK, CD, DFDL DFL FDL DFL FDL KFDL FDLzbhp zNo ratings yet
- BLT53Document12 pagesBLT53zbhp zNo ratings yet
- Atmel 2586 AVR 8 Bit Microcontroller ATtiny25 ATtiny45 ATtiny85 DatasheetDocument234 pagesAtmel 2586 AVR 8 Bit Microcontroller ATtiny25 ATtiny45 ATtiny85 DatasheetTudor ArthurNo ratings yet
- KLK, CD, DFDL DFL FDL DFL FDL KFDL FDLDocument1 pageKLK, CD, DFDL DFL FDL DFL FDL KFDL FDLzbhp zNo ratings yet
- OG - CDP 05M R 426M - V10eDocument17 pagesOG - CDP 05M R 426M - V10ezbhp zNo ratings yet
- CC1101 SMA Modulo RF Manual PDFDocument16 pagesCC1101 SMA Modulo RF Manual PDFpp100% (1)
- OG - CDP 05M R 426M - V10eDocument17 pagesOG - CDP 05M R 426M - V10ezbhp zNo ratings yet
- BFU630FDocument12 pagesBFU630Fzbhp zNo ratings yet
- BFU590Q: 1. Product ProfileDocument19 pagesBFU590Q: 1. Product Profilezbhp zNo ratings yet
- 2n3866a PDFDocument5 pages2n3866a PDFzbhp zNo ratings yet
- BFR 96 TsDocument9 pagesBFR 96 Tszbhp zNo ratings yet
- MICRF102: General DescriptionDocument12 pagesMICRF102: General Descriptionzbhp zNo ratings yet
- BFU550A: 1. Product ProfileDocument22 pagesBFU550A: 1. Product Profilezbhp zNo ratings yet
- Atmel 4511 Car Access T5754 DatasheetDocument13 pagesAtmel 4511 Car Access T5754 Datasheetzbhp zNo ratings yet
- Low Power High Performance 2.4 GHZ GFSK Transceiver: Features Pin AssignmentsDocument25 pagesLow Power High Performance 2.4 GHZ GFSK Transceiver: Features Pin Assignmentszbhp zNo ratings yet
- Descriptio Features: LTC6902 Multiphase Oscillator With Spread Spectrum Frequency ModulationDocument16 pagesDescriptio Features: LTC6902 Multiphase Oscillator With Spread Spectrum Frequency Modulationzbhp z100% (1)
- MICRF102: General DescriptionDocument12 pagesMICRF102: General Descriptionzbhp zNo ratings yet
- 2n3866 Series PDFDocument3 pages2n3866 Series PDFzbhp zNo ratings yet
- Description Features: PT2262 Remote Control EncoderDocument14 pagesDescription Features: PT2262 Remote Control Encoderzbhp zNo ratings yet
- PTB 20111 85 Watts, 860-900 MHZ Cellular Radio RF Power TransistorDocument3 pagesPTB 20111 85 Watts, 860-900 MHZ Cellular Radio RF Power Transistorzbhp zNo ratings yet
- Data Sheet: UHF Power TransistorDocument12 pagesData Sheet: UHF Power Transistorzbhp zNo ratings yet
- 2N3866 2N3866A NPN Silicon High Frequency Transistor DescriptionDocument3 pages2N3866 2N3866A NPN Silicon High Frequency Transistor Descriptionzbhp zNo ratings yet
- Descriptio Features: LTC6902 Multiphase Oscillator With Spread Spectrum Frequency ModulationDocument16 pagesDescriptio Features: LTC6902 Multiphase Oscillator With Spread Spectrum Frequency Modulationzbhp z100% (1)
- What Is QFN (MLP, MLF) : Taping & Dispensing & Screen PrintingDocument7 pagesWhat Is QFN (MLP, MLF) : Taping & Dispensing & Screen Printingzbhp zNo ratings yet
- Resilient Azure ArchitectureDocument19 pagesResilient Azure ArchitecturejpaxfNo ratings yet
- QUICKCHECK Software ManualDocument47 pagesQUICKCHECK Software ManualGaryNo ratings yet
- Managing Sophos Firewall in Sophos CentralDocument32 pagesManaging Sophos Firewall in Sophos CentralOlatunji KehindeNo ratings yet
- Logic and Computer Design Fundamentals 5th Edition Mano Solutions ManualDocument4 pagesLogic and Computer Design Fundamentals 5th Edition Mano Solutions Manualdakotawellscmzyqwaskg100% (32)
- Sas - Data Step ProcessingDocument9 pagesSas - Data Step ProcessingSoham SamantaNo ratings yet
- Clean Code V2.4 PDFDocument4 pagesClean Code V2.4 PDFHermano LiraNo ratings yet
- Software Piracy ProtectionDocument2 pagesSoftware Piracy ProtectionLokeshwar PawarNo ratings yet
- Computer Lab Layout - NewDocument1 pageComputer Lab Layout - Newbanu kuhanNo ratings yet
- Practice Midterm2 A Sol PDFDocument14 pagesPractice Midterm2 A Sol PDFplayboi partieNo ratings yet
- Sun Storedge 3000 Family Diagnostic Reporter 2.5 User'S GuideDocument30 pagesSun Storedge 3000 Family Diagnostic Reporter 2.5 User'S GuideArnab Sen0% (1)
- DUB-1312 - Release Notes - 20180925Document4 pagesDUB-1312 - Release Notes - 20180925dimas dwiNo ratings yet
- How I Learned To Stop Worrying and Write My Own ORMDocument24 pagesHow I Learned To Stop Worrying and Write My Own ORMJocildo KialaNo ratings yet
- Samsung Electronics-Samsung SecuritiesDocument27 pagesSamsung Electronics-Samsung SecuritiesYung-Chao HsuNo ratings yet
- Toshiba Satellite A300Document37 pagesToshiba Satellite A300Nagy József100% (1)
- CalemEAM Training Part3.0-InventoryFunctions Inventory PDFDocument32 pagesCalemEAM Training Part3.0-InventoryFunctions Inventory PDFpriyoNo ratings yet
- Alien Vault Device Integration Citrix NetScalerDocument7 pagesAlien Vault Device Integration Citrix NetScalerBrittAdamsNo ratings yet
- D50311GC40 AgDocument110 pagesD50311GC40 AgRavin SharmaNo ratings yet
- Metashape-Pro 1 7 enDocument187 pagesMetashape-Pro 1 7 enArseni MaximNo ratings yet
- Orange FoxDocument29 pagesOrange FoxiwanpasedahanNo ratings yet
- PP3 - Seat Work Exercises - Flowchart - Conditional (Dagdag)Document2 pagesPP3 - Seat Work Exercises - Flowchart - Conditional (Dagdag)John DagdagNo ratings yet
- IcanDocument33 pagesIcanLubnaNo ratings yet
- XC 131Document186 pagesXC 131Luis Albarracin100% (1)
- WPI Installation Log File Install Process StartedDocument6 pagesWPI Installation Log File Install Process StartedJelena_Babic_6675No ratings yet
- 10 Useful 'Interview Questions and Answers' On Linux Shell ScriptingDocument17 pages10 Useful 'Interview Questions and Answers' On Linux Shell ScriptingNagraj GoudNo ratings yet
- Selecting Your Compiler When Calling PreDocument7 pagesSelecting Your Compiler When Calling PreAbdel-Rahman Saifedin ArandasNo ratings yet
- User's Manual: Sverker WinDocument28 pagesUser's Manual: Sverker WinHaianh PhamNo ratings yet
- Emulation of Automotive Communication Protocol Single Edge Nibble Transmission (SENT) Using Aurix Family of MicrocontrollersDocument4 pagesEmulation of Automotive Communication Protocol Single Edge Nibble Transmission (SENT) Using Aurix Family of MicrocontrollersseventhsensegroupNo ratings yet
- Supermicro X10SRi-FDocument126 pagesSupermicro X10SRi-FIstvan KovasznaiNo ratings yet
- Software Requirment Specification Template 2016Document14 pagesSoftware Requirment Specification Template 2016Thanh Bình LêNo ratings yet
- How To Disassemble-Assemble A ComputerDocument17 pagesHow To Disassemble-Assemble A ComputerMelvin Leyva100% (2)