You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Diesel TM - 5 6115 545 12Document7 pagesDiesel TM - 5 6115 545 12rfans4No ratings yet
- Design of Deep Basement For Waterproofing ReportDocument16 pagesDesign of Deep Basement For Waterproofing Reportlpcgby27100% (1)
- Thickness Calculation of Pressure Vessel ShellDocument16 pagesThickness Calculation of Pressure Vessel ShellRamuAlagappan100% (1)
- Mitsubishi L3EDocument78 pagesMitsubishi L3EBobCavNo ratings yet
- Controlled Blasting Techniques: National Institute of Technology Karnataka, SurathkalDocument17 pagesControlled Blasting Techniques: National Institute of Technology Karnataka, SurathkalNikhil Ranjan0% (1)
- Construction Methods and TechniquesDocument23 pagesConstruction Methods and TechniquesTEODORO AMATOSA JR.No ratings yet
- Chapter 6 CascadesDocument25 pagesChapter 6 Cascadesramamurthy123No ratings yet
- Black & Decker The Complete Guide To Finishing Walls & CeilingsDocument242 pagesBlack & Decker The Complete Guide To Finishing Walls & CeilingsJosé Félix100% (1)
- Granite Manufacturing ProcessDocument3 pagesGranite Manufacturing Processanilvujani100% (2)
- Human Sensing EnalabWIPDocument35 pagesHuman Sensing EnalabWIPJohnDevNo ratings yet
- Installation and Operating Guide: Photovoltaik Module Production Series ACDocument10 pagesInstallation and Operating Guide: Photovoltaik Module Production Series ACClyde FairbanksNo ratings yet
- Module1 IntroductionDocument13 pagesModule1 Introductionmarlo ignacioNo ratings yet
- Closed Loop Speed and Position Control of DC MotorsDocument7 pagesClosed Loop Speed and Position Control of DC Motorslizhi0007No ratings yet
- MMM-A-132B Federal Spec For Adhesives Heat Resistant Airframe Structural Metal To MetalDocument29 pagesMMM-A-132B Federal Spec For Adhesives Heat Resistant Airframe Structural Metal To Metalbman0051401No ratings yet
- Core Practical 4Document4 pagesCore Practical 4DanKimberleyNo ratings yet
- Honda GCV135 PartsDocument80 pagesHonda GCV135 PartsLUCAPRATNo ratings yet
- Manimaran - Oracle DBA ResumeDocument3 pagesManimaran - Oracle DBA Resumeksknrindian100% (1)
- HT - Büt - 2022 2023 Son HalDocument5 pagesHT - Büt - 2022 2023 Son HalRbe Batu HanNo ratings yet
- 3M Power Industry SolutionsDocument44 pages3M Power Industry Solutionstony6868No ratings yet
- Template Users GuideDocument426 pagesTemplate Users GuideRoberto Hernandez AmecaNo ratings yet
- Evidencia 2 Workshop Understanding The Distribution Center Layout V2Document6 pagesEvidencia 2 Workshop Understanding The Distribution Center Layout V2jorge david sotoNo ratings yet
- LPG For Heavy Duty Engines 2017Document116 pagesLPG For Heavy Duty Engines 2017Neagoie Sergiu100% (1)
- TOEFL ExerciseDocument2 pagesTOEFL ExerciseEko Junianto100% (2)
- Systems Theory: International Encyclopedia of Housing and HomeDocument10 pagesSystems Theory: International Encyclopedia of Housing and HomeJennerie ZyNo ratings yet
- Sami2011 CFPDocument1 pageSami2011 CFPJoshua BernalNo ratings yet
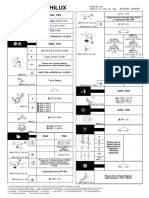
- Hilux: GGN, TGNDocument26 pagesHilux: GGN, TGNbelkaidaNo ratings yet
- Irb 4600Document400 pagesIrb 4600Jean GrégoireNo ratings yet
- Deaerator Troubleshooting and Preventive Maintenance - Engineering Equipment IndiaDocument5 pagesDeaerator Troubleshooting and Preventive Maintenance - Engineering Equipment IndiasambhuNo ratings yet
- Beginner - S Guide - To - 3D - PrintingDocument44 pagesBeginner - S Guide - To - 3D - PrintingDesainCADNo ratings yet
- A11 200 315 630 1000 1600 KVA Dry Type DT 2011Document25 pagesA11 200 315 630 1000 1600 KVA Dry Type DT 2011deshmukh.4uNo ratings yet