You might also like
- ISO bearing damage classificationsDocument63 pagesISO bearing damage classificationskcp1986100% (2)
- Studies in Canadian Military History. Andrew B. Godefroy - Defence and Discovery Canada Military Space Program, 1945 Press (2011)Document257 pagesStudies in Canadian Military History. Andrew B. Godefroy - Defence and Discovery Canada Military Space Program, 1945 Press (2011)Rahmi KarayolNo ratings yet
- QTS Numeracy Test 2Document3 pagesQTS Numeracy Test 2Stella Seremetaki Pure MathematicianNo ratings yet
- Mass Communication Media and Culture (Media and Entertainment)Document820 pagesMass Communication Media and Culture (Media and Entertainment)Bianca Iorga0% (1)
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Lab03 Impedance TransformationDocument7 pagesLab03 Impedance TransformationMuddasser KhaliqNo ratings yet
- Memristor Based Programmable Threshold Logic Array: Jeyavijayan Rajendran, Harika Manem, Ramesh Karri and Garrett S. RoseDocument6 pagesMemristor Based Programmable Threshold Logic Array: Jeyavijayan Rajendran, Harika Manem, Ramesh Karri and Garrett S. RoseEric DharanNo ratings yet
- Transfer Function and Impulse Response Simulation of Power Line ChannelDocument7 pagesTransfer Function and Impulse Response Simulation of Power Line ChannelIjsrnet EditorialNo ratings yet
- IJCSET13-04-09-023logical Effort 2Document11 pagesIJCSET13-04-09-023logical Effort 2Srujan RavindraNo ratings yet
- Sensors 12 03587 PDFDocument18 pagesSensors 12 03587 PDFMuhammet AteşNo ratings yet
- Coupling-Driven Signal Encoding Scheme For Low-Power Interface DesignDocument4 pagesCoupling-Driven Signal Encoding Scheme For Low-Power Interface DesignshastryNo ratings yet
- Ultra-Low Power S-Boxes Architecture For AES: Xing Ji-Peng, ZOU Xue-Cheng, Guo XuDocument6 pagesUltra-Low Power S-Boxes Architecture For AES: Xing Ji-Peng, ZOU Xue-Cheng, Guo XuDam Minh TungNo ratings yet
- Ijaiem 2013 10 31 070Document7 pagesIjaiem 2013 10 31 070International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 2014 - Design and Synthesis of Ultralow Energy Spin-Memristor Threshold LogicDocument10 pages2014 - Design and Synthesis of Ultralow Energy Spin-Memristor Threshold Logicfromthedepth@gmail.comNo ratings yet
- 1A DefectDocument8 pages1A Defectdaniel_sa2011No ratings yet
- Single Electron Based Binary Multipliers With Overflow DetectionDocument13 pagesSingle Electron Based Binary Multipliers With Overflow Detectionprabhjot singh1No ratings yet
- SET MultiplerDocument20 pagesSET MultiplerSridevi SriadibhatlaNo ratings yet
- Topic: Islanding DetectionDocument11 pagesTopic: Islanding DetectionRatik MittalNo ratings yet
- Low Power Techniques For Field Programmable Gate Array: PG Scholar, Dept. of ECE, DBITDocument5 pagesLow Power Techniques For Field Programmable Gate Array: PG Scholar, Dept. of ECE, DBITlambanaveenNo ratings yet
- Tee Paper 1Document4 pagesTee Paper 1Mylavarapu SriprithamNo ratings yet
- Mos - Ert GCGC 2020 07Document9 pagesMos - Ert GCGC 2020 07Mimi MoragnNo ratings yet
- A Chaos-based Complex Micro-Instruction Set for Mitigating Instruction Reverse EngineeringDocument14 pagesA Chaos-based Complex Micro-Instruction Set for Mitigating Instruction Reverse EngineeringMesbahNo ratings yet
- Computers and Electrical Engineering: Wang Xingzhi, Yan Zheng, Li LiDocument12 pagesComputers and Electrical Engineering: Wang Xingzhi, Yan Zheng, Li LiDebasree SahaNo ratings yet
- Circuit Activity Based Logic Synthesis For Low Power Reliable OperationsDocument11 pagesCircuit Activity Based Logic Synthesis For Low Power Reliable OperationsTinyVTNo ratings yet
- An Efficient Path-Based Equivalent Circuit Model For Design, Synthesis, and Optimization of Power Distribution Networks in Multilayer Printed Circuit BoardsDocument10 pagesAn Efficient Path-Based Equivalent Circuit Model For Design, Synthesis, and Optimization of Power Distribution Networks in Multilayer Printed Circuit BoardsRicardo AlonsoNo ratings yet
- Bharat-22 Paper 10Document6 pagesBharat-22 Paper 10Niranjan ReddyNo ratings yet
- Analog non-linear function synthesis circuit using resistive networksDocument5 pagesAnalog non-linear function synthesis circuit using resistive networksSamina MohsinNo ratings yet
- Efecto PielDocument9 pagesEfecto PielMilena AlarconNo ratings yet
- C. J. Garasi Et Al - Multi-Dimensional High Energy Density Physics Modeling and Simulation of Wire Array Z-Pinch PhysicsDocument9 pagesC. J. Garasi Et Al - Multi-Dimensional High Energy Density Physics Modeling and Simulation of Wire Array Z-Pinch PhysicsCola7890No ratings yet
- On-Chip Compensation of Device-Mismatch Effects in Analog VLSI Neural NetworksDocument8 pagesOn-Chip Compensation of Device-Mismatch Effects in Analog VLSI Neural NetworksSriraj JoshiNo ratings yet
- Normally-Off Logic Based On Resistive Switches-Part I: Logic GatesDocument8 pagesNormally-Off Logic Based On Resistive Switches-Part I: Logic GatesihbrusansuharshNo ratings yet
- Method For Calculating Coupling Coeffici PDFDocument4 pagesMethod For Calculating Coupling Coeffici PDFBaby Jane DurogNo ratings yet
- Analysis, Design, and Optimization of Spiral Inductors and Transformers For Si RF IC'sDocument12 pagesAnalysis, Design, and Optimization of Spiral Inductors and Transformers For Si RF IC'sRF_RAJANo ratings yet
- Nanometer MOSFETDocument12 pagesNanometer MOSFETSibi ManojNo ratings yet
- Exploring Boolean and Non-Boolean Computing With Spin Torque DevicesDocument5 pagesExploring Boolean and Non-Boolean Computing With Spin Torque Devicesশেখ আরিফুল ইসলামNo ratings yet
- Performance Analysis For Gigabit Ethernet Communication Network Under Various Data Rates and Switching StructuresDocument11 pagesPerformance Analysis For Gigabit Ethernet Communication Network Under Various Data Rates and Switching StructuresUseful Videos DevotionalNo ratings yet
- A Model Based Comparison of BiFeO3 Device Applicability in Neuromorphic HardwareDocument4 pagesA Model Based Comparison of BiFeO3 Device Applicability in Neuromorphic Hardware322203359001No ratings yet
- Application of Artificial Neural NetworkDocument7 pagesApplication of Artificial Neural NetworkRahul Kumar JhaNo ratings yet
- Akbar 2011Document10 pagesAkbar 2011kamarajme2006No ratings yet
- 01051759Document5 pages01051759Aarif MalikNo ratings yet
- A New Test Pattern Generateor by Altering The Structure of 2-D LFSR For Built in Self Test ApplicationDocument6 pagesA New Test Pattern Generateor by Altering The Structure of 2-D LFSR For Built in Self Test Applicationmobile 1360No ratings yet
- 5-Nanowire Logic CircuitDocument5 pages5-Nanowire Logic CircuitThang PhamNo ratings yet
- 6 TransMag Magnetic Design Considerations of Bidirectional InductiveDocument5 pages6 TransMag Magnetic Design Considerations of Bidirectional InductivemarwanNo ratings yet
- A Comparative Study Between Different Types of Adders and MultipliersDocument5 pagesA Comparative Study Between Different Types of Adders and MultipliersVivek SinghNo ratings yet
- ASTM G57-06 - G187 - 12A-Electrical Resistivity TomographyDocument8 pagesASTM G57-06 - G187 - 12A-Electrical Resistivity Tomographycojef77327No ratings yet
- Sub-Threshold Adiabatic Logic For Low Power ApplicationsDocument7 pagesSub-Threshold Adiabatic Logic For Low Power ApplicationsarcherselevatorsNo ratings yet
- Reliability Analysis and Optimization of Power-Gated IcsDocument12 pagesReliability Analysis and Optimization of Power-Gated Icskaushik_gupta_4No ratings yet
- DCinv V6 Rev2 CleanDocument38 pagesDCinv V6 Rev2 Cleanyasirarafat91No ratings yet
- Systematic Approach To Modeling Power Semiconductor Devices Based On Charge Control PrinciplesDocument7 pagesSystematic Approach To Modeling Power Semiconductor Devices Based On Charge Control PrinciplesAnonymous 78iAn6No ratings yet
- A Tutorial: Subcircuit and Verilog-A RF Circuit Simulation Models For Axial and Surface Mounted ResistorsDocument17 pagesA Tutorial: Subcircuit and Verilog-A RF Circuit Simulation Models For Axial and Surface Mounted Resistorsiarcad9403No ratings yet
- A Ku-Band Low-Loss Traveling-Wave Power Divider Using A Hollow Substrate Integrated Waveguide and Its Microstrip Transition - KoreaDocument8 pagesA Ku-Band Low-Loss Traveling-Wave Power Divider Using A Hollow Substrate Integrated Waveguide and Its Microstrip Transition - KoreaVladimir ShkolnikovNo ratings yet
- Performance Analysis of Positive Feedback Adiabatic Logic For Low PowerDocument7 pagesPerformance Analysis of Positive Feedback Adiabatic Logic For Low PowerKiran KumarNo ratings yet
- Designing Reliable Digital Molecular Electronic Circuits: Ci Lei, Dinesh Pamunuwa, Steven Bailey, Colin LambertDocument34 pagesDesigning Reliable Digital Molecular Electronic Circuits: Ci Lei, Dinesh Pamunuwa, Steven Bailey, Colin LambertAsadullah AmanatNo ratings yet
- The Wireless ElectricityDocument17 pagesThe Wireless Electricitygrishabh84No ratings yet
- An Alternative Approach For Generation of Membership Functions and Fuzzy Rules Based On Radial and Cubic Basis Function NetworksDocument20 pagesAn Alternative Approach For Generation of Membership Functions and Fuzzy Rules Based On Radial and Cubic Basis Function NetworksAntonio Madueño LunaNo ratings yet
- Design of High Speed and Area Efficient N-Bit Digital ComparatorDocument8 pagesDesign of High Speed and Area Efficient N-Bit Digital ComparatorIJRASETPublicationsNo ratings yet
- Implementation of Low Power Test Pattern Generator Using LFSRDocument6 pagesImplementation of Low Power Test Pattern Generator Using LFSRIjsrnet EditorialNo ratings yet
- Fast Approximate Energy Minimization Via Graph CutsDocument18 pagesFast Approximate Energy Minimization Via Graph Cutskarnati87No ratings yet
- Modelling of OHL and UG PDFDocument6 pagesModelling of OHL and UG PDFCarlos Lino Rojas AgüeroNo ratings yet
- Broadside suspended stripline 3 dB couplers design procedureDocument6 pagesBroadside suspended stripline 3 dB couplers design procedureBen WalpoleNo ratings yet
- On Kron's DiakopticsDocument5 pagesOn Kron's Diakopticsr_berthetNo ratings yet
- An Optimal Load Shedding Approach For Distribution Networks With Dgs Considering Capacity Deficiency Modelling of Bulked Power SupplyDocument9 pagesAn Optimal Load Shedding Approach For Distribution Networks With Dgs Considering Capacity Deficiency Modelling of Bulked Power SupplybimoNo ratings yet
- 2190-Article Text-14931-14584-10-20220601Document11 pages2190-Article Text-14931-14584-10-20220601Yoakim MoraNo ratings yet
- Fast Power System Security Analysis With Guided Dropout: 1 Background and MotivationsDocument6 pagesFast Power System Security Analysis With Guided Dropout: 1 Background and MotivationsMatthew SimeonNo ratings yet
- Delhi Health Bulletin - COVID 19 11.05.2020Document3 pagesDelhi Health Bulletin - COVID 19 11.05.2020Salman KhanNo ratings yet
- Notification: Entry Branch PC/ SSC Course Number VacanciesDocument59 pagesNotification: Entry Branch PC/ SSC Course Number VacanciesRajakumariNo ratings yet
- Three-Input Single-Output Current-Mode Biquadratic Filter With High-Output Impedance Using A Single Current Follower Transconductance AmplifierDocument5 pagesThree-Input Single-Output Current-Mode Biquadratic Filter With High-Output Impedance Using A Single Current Follower Transconductance AmplifierSalman KhanNo ratings yet
- Digital or Cad SimulationDocument6 pagesDigital or Cad SimulationSalman KhanNo ratings yet
- Digital or Cad SimulationDocument3 pagesDigital or Cad SimulationRathika DhamuNo ratings yet
- E-textile BibliographyDocument3 pagesE-textile BibliographyJoyce PaduaNo ratings yet
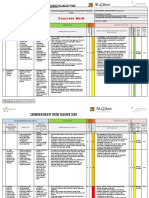
- SS RA - 010 Lean Concrete Pouring 1Document8 pagesSS RA - 010 Lean Concrete Pouring 1Sn AhsanNo ratings yet
- 이산수학 유석인 pptDocument29 pages이산수학 유석인 ppt최규민100% (1)
- Ministry of Sports OmanDocument6 pagesMinistry of Sports OmanGoogle Update 2020No ratings yet
- Quiz Chapter 4 Questions and AnswersDocument10 pagesQuiz Chapter 4 Questions and AnswersHữu100% (2)
- Engineering Journal Adsorption of Nitrogen and Sulphur Organic-Compounds On Titania NanotubesDocument11 pagesEngineering Journal Adsorption of Nitrogen and Sulphur Organic-Compounds On Titania NanotubesEngineering JournalNo ratings yet
- Structural Steel and Foundation CalculationDocument27 pagesStructural Steel and Foundation CalculationAshraf AmmarNo ratings yet
- CATIA - Mold Tooling CreationDocument2 pagesCATIA - Mold Tooling CreationPlabsput Toin ToingNo ratings yet
- CurriculumDocument3 pagesCurriculumJon SalvatierraNo ratings yet
- A Study On Employee Retention StrategiesDocument2 pagesA Study On Employee Retention StrategiesRajeshApexNo ratings yet
- Loop Fold Structure of Proteins: Resolution of Levinthal's ParadoxDocument24 pagesLoop Fold Structure of Proteins: Resolution of Levinthal's ParadoxJpds JoyantaNo ratings yet
- Chapter 16 (Philoid-In)Document19 pagesChapter 16 (Philoid-In)Ram KrishnaNo ratings yet
- M.Rafi Asst Professor CVDocument6 pagesM.Rafi Asst Professor CVrafiNo ratings yet
- Article Analysis Review - Research Methods - AmatondingDocument2 pagesArticle Analysis Review - Research Methods - AmatondingAMR-BIN OMAR AMATONDINGNo ratings yet
- Feap Element LibraryDocument6 pagesFeap Element LibrarySnaga VjereNo ratings yet
- Apros & Aspen DynamicsDocument11 pagesApros & Aspen Dynamicskonstantina139No ratings yet
- Business meeting workshopDocument3 pagesBusiness meeting workshopEdison David GuapachoNo ratings yet
- Hyd 3Document1 pageHyd 3Jocelyn CabarlesNo ratings yet
- Stress Faults and FoldsDocument21 pagesStress Faults and FoldsReliza Amahan SenoNo ratings yet
- BỘ TN HSG G6 PHẦN 3 (Câu 1-50)Document7 pagesBỘ TN HSG G6 PHẦN 3 (Câu 1-50)Nguyễn ThơmNo ratings yet
- Material About Asking Questions and Giving OpinionsDocument41 pagesMaterial About Asking Questions and Giving OpinionsReyaaz MaharayaNo ratings yet
- Concepts in Enterprise Resource Planning: Chapter One Business Functions and Business ProcessesDocument44 pagesConcepts in Enterprise Resource Planning: Chapter One Business Functions and Business ProcessessalmanNo ratings yet
- Advanced Statistics Assignment HelpDocument5 pagesAdvanced Statistics Assignment HelpStatistics Homework SolverNo ratings yet
- Environmental Justice Case StudyDocument3 pagesEnvironmental Justice Case StudyIrish Pauline L. EreñoNo ratings yet
- International Journal of English Language and Literature StudiesDocument9 pagesInternational Journal of English Language and Literature StudiesZara NurNo ratings yet
- Govt eProcurement System Updates Due Date Extension Highway ProjectDocument3 pagesGovt eProcurement System Updates Due Date Extension Highway ProjectHarshraj VaghelaNo ratings yet