You might also like
- MicroDocument1 pageMicroAnderson Olivier100% (1)
- Ckds 1307Document13 pagesCkds 1307chanh4351180005No ratings yet
- Micro-Grid Voltage StabilizerDocument6 pagesMicro-Grid Voltage StabilizerharrysinghNo ratings yet
- Circuito Lab1Document1 pageCircuito Lab1emze_franzNo ratings yet
- Incubadora de Transporte Itr-2S: CPU 3 A4Document1 pageIncubadora de Transporte Itr-2S: CPU 3 A4CamilaNo ratings yet
- Infra Red: J1 DisplayDocument3 pagesInfra Red: J1 DisplayKyungsoo100% (1)
- LCDCharacterDocument1 pageLCDCharacterJIGNESH100% (1)
- DictionaryDocument1 pageDictionaryDinesh Sharma100% (1)
- Experiment 04Document5 pagesExperiment 04Zunair NazirNo ratings yet
- MC ToggleDocument1 pageMC ToggleUMAR FAYYAZNo ratings yet
- Control a DC Motor with an L298N Driver and ATmega32 MicrocontrollerDocument5 pagesControl a DC Motor with an L298N Driver and ATmega32 MicrocontrollerMotasim FaiyazNo ratings yet
- Pelatihan ATMEGA8535 CVAVRDocument121 pagesPelatihan ATMEGA8535 CVAVRnbbudionoNo ratings yet
- Wireless Temprature Control FanDocument23 pagesWireless Temprature Control FanrajNo ratings yet
- Gambarlah Dengan Menggunakan Proteus Skema Di Bawah Ini:: Pengendali Motor DCDocument4 pagesGambarlah Dengan Menggunakan Proteus Skema Di Bawah Ini:: Pengendali Motor DCLukman AriyantoNo ratings yet
- ADC0804Document1 pageADC0804Norival Maske100% (1)
- ECG PC CircuitDocument1 pageECG PC CircuitSanchitha Ashok100% (1)
- Tribhuvan University Institute of Engineering Pulchowk, Lalipur A Lab Report On Embedded SystemDocument24 pagesTribhuvan University Institute of Engineering Pulchowk, Lalipur A Lab Report On Embedded SystemSaroj Katwal0% (1)
- 8255 Port and Control Word ConfigurationDocument1 page8255 Port and Control Word ConfigurationvivaelhuanoNo ratings yet
- Ac DimmerDocument1 pageAc DimmerGarvitt BhatnagarNo ratings yet
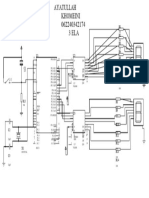
- 7segement Common KatodaDocument1 page7segement Common KatodaAyatullah khomeiniNo ratings yet
- Manual Simple Trainer 8051Document6 pagesManual Simple Trainer 8051Sumarwan WawanNo ratings yet
- HarshaDocument14 pagesHarshaUjjwal Deb BarmanNo ratings yet
- Skematik DSNDocument1 pageSkematik DSNAsrul YanuarNo ratings yet
- New ProjectDocument1 pageNew ProjectAhmad Zaki IdrisNo ratings yet
- Adc Pic16f877Document1 pageAdc Pic16f877Phap Nguyen100% (1)
- Minimum System Atmega8 H-Bridge Motor Driver: Putar Kanan Putar KiriDocument1 pageMinimum System Atmega8 H-Bridge Motor Driver: Putar Kanan Putar KiriJeAmmy BelajarSabarrNo ratings yet
- Clock SchematicDocument1 pageClock SchematicRaja Babu100% (1)
- Mini DSO Scheme V2.0Document1 pageMini DSO Scheme V2.0FernandoNo ratings yet
- At89sxx Development BoardDocument3 pagesAt89sxx Development BoardJavaid KhanNo ratings yet
- FACULTY OF ELECTRICAL AND ELECTRONIC ENGINEERING SENSORS AND INSTRUMENTATIONS TESTDocument37 pagesFACULTY OF ELECTRICAL AND ELECTRONIC ENGINEERING SENSORS AND INSTRUMENTATIONS TESTThinh LêNo ratings yet
- SDA and I2C Configuration on a PIC16F887 MicrocontrollerDocument1 pageSDA and I2C Configuration on a PIC16F887 MicrocontrollerOscar Andres Soto100% (2)
- Chapter 1Document38 pagesChapter 1Sudarshan GosaviNo ratings yet
- East West LDR CircuitDocument1 pageEast West LDR CircuitSahariar Bin ShafiqueNo ratings yet
- Salaudeen Iliasu Olayiwola Adi2 Electronic Code Lock Report: Schematic Diagram From ProteusDocument14 pagesSalaudeen Iliasu Olayiwola Adi2 Electronic Code Lock Report: Schematic Diagram From ProteusSalaudeen Ilyas100% (1)
- 89c51 - Projectboard - Circuit DiagramDocument2 pages89c51 - Projectboard - Circuit DiagramNirmal Vinu100% (1)
- MPC89L (E) 51-515 Application Note A1.5Document44 pagesMPC89L (E) 51-515 Application Note A1.5Alexander VarchenkoNo ratings yet
- PCB Mora-1Document2 pagesPCB Mora-1RaulNo ratings yet
- Tugas 1Document1 pageTugas 1WempiNo ratings yet
- Expt. 3 ESDocument3 pagesExpt. 3 ESpadhychandan01No ratings yet
- Iswanti MikroDocument21 pagesIswanti MikroFarlinaefendi98 201098No ratings yet
- Hard BootDocument1 pageHard BootJairo Andrés Quiñones Buitrago100% (2)
- Embeded System Assignment5Document6 pagesEmbeded System Assignment5Sajan DuwalNo ratings yet
- VCC GND SCL Sda Xda XCL Ado Int: U1 (RA7/OSC1/CLKIN)Document1 pageVCC GND SCL Sda Xda XCL Ado Int: U1 (RA7/OSC1/CLKIN)Donaldo Ruiz PeñaNo ratings yet
- Final Exam Topic 6 - Example Questions - SPIDocument4 pagesFinal Exam Topic 6 - Example Questions - SPITiến ThànhNo ratings yet
- RTC SelectionDocument8 pagesRTC Selectionmadhuvariar100% (1)
- Proteus LEDDocument3 pagesProteus LEDMuhammad Zikri AbdillahNo ratings yet
- Ch4 TimersDocument18 pagesCh4 TimersBerra BeşerNo ratings yet
- SDNL 1Document1 pageSDNL 1Trọng LêNo ratings yet
- Countdown TimerDocument1 pageCountdown TimerGarvitt BhatnagarNo ratings yet
- Exemplo KetyDocument2 pagesExemplo Ketyric1988lealNo ratings yet
- 8051 Architecture ?Document62 pages8051 Architecture ?Camilo SilvaNo ratings yet
- Atiny SchematicDocument1 pageAtiny SchematicShweta KhincheeNo ratings yet
- OLUPS SCR B21 SchematicsDocument1 pageOLUPS SCR B21 SchematicsaananthuajaysNo ratings yet
- Proyecto PortonDocument2 pagesProyecto PortonEmilio EscalanteNo ratings yet
- 16FUSB Schematic-1.2 PDFDocument1 page16FUSB Schematic-1.2 PDFgermanmkurylo100% (1)
- Transformer voltage regulator circuit with 7805 rectifier and motor driverDocument1 pageTransformer voltage regulator circuit with 7805 rectifier and motor driverWaqas AhmadNo ratings yet
- Esque Matic oDocument1 pageEsque Matic oGusTavo Villalobos AvilaNo ratings yet
- Gsm-Based Well Water Level MonitorDocument41 pagesGsm-Based Well Water Level MonitorPavan Kumar A GNo ratings yet
- AUTOMATIC DRILLING MACHINEDocument6 pagesAUTOMATIC DRILLING MACHINESumit KambleNo ratings yet
- Periodic Progress Report (PPR) Details PDFDocument2 pagesPeriodic Progress Report (PPR) Details PDFHardik PatoliyaNo ratings yet
- Web Technology Exam Questions and AnswersDocument1 pageWeb Technology Exam Questions and AnswersHardik PatoliyaNo ratings yet
- Gujarat Technological University: InstructionsDocument1 pageGujarat Technological University: InstructionsHardik PatoliyaNo ratings yet
- Practical SYMBOLS and P & ID Diagram: DateDocument49 pagesPractical SYMBOLS and P & ID Diagram: DateHardik PatoliyaNo ratings yet
- Periodic Progress Report (PPR) DetailsDocument2 pagesPeriodic Progress Report (PPR) DetailsHardik PatoliyaNo ratings yet
- Phase-Lag Compensation Using Frequency Response: Active Learning Assignment OnDocument18 pagesPhase-Lag Compensation Using Frequency Response: Active Learning Assignment OnHardik PatoliyaNo ratings yet
- PLAGIARISM SCAN REPORTDocument2 pagesPLAGIARISM SCAN REPORTHardik PatoliyaNo ratings yet
- Periodic Progress Report (PPR) DetailsDocument2 pagesPeriodic Progress Report (PPR) DetailsHardik PatoliyaNo ratings yet
- Project Presentation: Sorting System Using Image ProcessingDocument9 pagesProject Presentation: Sorting System Using Image ProcessingHardik PatoliyaNo ratings yet
- PDC 1 PDFDocument47 pagesPDC 1 PDFHardik PatoliyaNo ratings yet
- PDC 1 PDFDocument47 pagesPDC 1 PDFHardik PatoliyaNo ratings yet
- P&I Diagram: Palak GajjarDocument35 pagesP&I Diagram: Palak GajjarHardik PatoliyaNo ratings yet
- PDC Question BankDocument15 pagesPDC Question BankHardik PatoliyaNo ratings yet
- Static and Dynamic Characteristics of Measurement SystemDocument8 pagesStatic and Dynamic Characteristics of Measurement Systemc5404No ratings yet
- Patel Hostel: VASAD - 388306Document2 pagesPatel Hostel: VASAD - 388306Hardik PatoliyaNo ratings yet
- Practical-9: AIM: To Simulate PWM InverterDocument5 pagesPractical-9: AIM: To Simulate PWM InverterHardik PatoliyaNo ratings yet
- Practical-11: AIM: To Study Speed Control of Stepper Motor Using Microcontroller. TheoryDocument2 pagesPractical-11: AIM: To Study Speed Control of Stepper Motor Using Microcontroller. TheoryHardik PatoliyaNo ratings yet
- Practical - 6-2Document2 pagesPractical - 6-2Hardik PatoliyaNo ratings yet
- Simulate PWM Inverter Using MATLABDocument5 pagesSimulate PWM Inverter Using MATLABHardik PatoliyaNo ratings yet
- Filtro MFV 27Document2 pagesFiltro MFV 27Diana PinosNo ratings yet
- Polish Words Minimum To Learn DictionaryDocument69 pagesPolish Words Minimum To Learn DictionaryAndras KondratNo ratings yet
- Angles of Elevation and Depression, Bearings NotesDocument4 pagesAngles of Elevation and Depression, Bearings Notesroddyeal100% (2)
- Company ProfileDocument10 pagesCompany Profile1anupma0No ratings yet
- Honda Civic OBD0 EF ECU PINOUTS - My Pro Street PDFDocument11 pagesHonda Civic OBD0 EF ECU PINOUTS - My Pro Street PDFWill ?100% (2)
- DAPUS TINPUS - WPS OfficeDocument3 pagesDAPUS TINPUS - WPS OfficeSilvana NurulfauziyyahNo ratings yet
- MRCP EthicsDocument33 pagesMRCP EthicstaherNo ratings yet
- Jyotish - A Manual of Hindu Astrology - B.v.raman - 1992Document149 pagesJyotish - A Manual of Hindu Astrology - B.v.raman - 1992Ram RamNo ratings yet
- Irrigation Project ManualDocument66 pagesIrrigation Project ManualHorace Prophetic DavisNo ratings yet
- Prof. Vijaya Lakshmi Nag CVDocument24 pagesProf. Vijaya Lakshmi Nag CVanislinek15No ratings yet
- Specifications Models 37R116, 37R118 and 43R175: Carry Capacity: 18,200 To 47,200 Lbs (8250 To 21,400 KG.)Document7 pagesSpecifications Models 37R116, 37R118 and 43R175: Carry Capacity: 18,200 To 47,200 Lbs (8250 To 21,400 KG.)Marek WyszatyckiNo ratings yet
- F 25 Sensor Family Miniature Sensors for Precision DetectionDocument34 pagesF 25 Sensor Family Miniature Sensors for Precision DetectionAlex GarduñoNo ratings yet
- Tunics Step by StepDocument10 pagesTunics Step by Stepsarahmichelef100% (18)
- Unit 1 Purva Swadhyaya QuestionsDocument4 pagesUnit 1 Purva Swadhyaya QuestionsSurrender to Krishna AlwaysNo ratings yet
- DATASHEET Transistor 13003ADDocument4 pagesDATASHEET Transistor 13003ADCarlos MoraNo ratings yet
- An Overview of Muga and Eri Silk Industry in The North Eastern Region of India: An Empirical Study Dr. Jatindra Nath SaikiaDocument11 pagesAn Overview of Muga and Eri Silk Industry in The North Eastern Region of India: An Empirical Study Dr. Jatindra Nath Saikiajatin_saikiaNo ratings yet
- Using Coffee Grounds as FertilizerDocument18 pagesUsing Coffee Grounds as FertilizerKyle BARRIOSNo ratings yet
- (MT 6322 - MYCO VIRO LAB) Unit 7 Laboratory Diagnosis For Negative-Sense (-) ssRNA VirusesDocument15 pages(MT 6322 - MYCO VIRO LAB) Unit 7 Laboratory Diagnosis For Negative-Sense (-) ssRNA VirusesAbbas MaghazehiNo ratings yet
- Guillaume Apollinaire-Alcools (Athlone French Poets) (French Edition) (2001)Document195 pagesGuillaume Apollinaire-Alcools (Athlone French Poets) (French Edition) (2001)Antonio Scalia100% (5)
- Runningrate Asiaking Juli'23Document32 pagesRunningrate Asiaking Juli'23cecilia ivadaaNo ratings yet
- Biosystems Engineering BS CurriculumDocument2 pagesBiosystems Engineering BS CurriculumAsiiimweNo ratings yet
- Wood Turning NotesDocument36 pagesWood Turning Notestheodrosyo0% (1)
- Aryatech Brochure IndiaDocument12 pagesAryatech Brochure IndiaHari RamNo ratings yet
- Official All Things Turmeric PPT GuidebookDocument14 pagesOfficial All Things Turmeric PPT Guidebookapi-507527047No ratings yet
- Realtime Physics: Active Learning Labs Transforming The Introductory LaboratoryDocument14 pagesRealtime Physics: Active Learning Labs Transforming The Introductory LaboratorysaleemNo ratings yet
- Agile Final Exam - Answer TranscriptDocument12 pagesAgile Final Exam - Answer TranscriptMehwish GauriNo ratings yet
- Jeanine Meyer - Origami As A General Education Math CourDocument4 pagesJeanine Meyer - Origami As A General Education Math CourscheeleNo ratings yet
- OL Lect 9 Seismic Acquisition NewDocument106 pagesOL Lect 9 Seismic Acquisition NewMohammad BilalNo ratings yet
- Студената войнаDocument421 pagesСтудената войнаauroradentata0% (1)
- Prog 4534543Document559 pagesProg 4534543Vasile TroianNo ratings yet