You might also like
- Simulink TutorialDocument51 pagesSimulink TutorialAli AhmadNo ratings yet
- Nonlinear Programming 4: Proceedings of the Nonlinear Programming Symposium 4 Conducted by the Computer Sciences Department at the University of Wisconsin–Madison, July 14-16, 1980From EverandNonlinear Programming 4: Proceedings of the Nonlinear Programming Symposium 4 Conducted by the Computer Sciences Department at the University of Wisconsin–Madison, July 14-16, 1980Olvi L. MangasarianNo ratings yet
- Redux Documentation 2017-10-11Document244 pagesRedux Documentation 2017-10-11Essidik EddoukaliNo ratings yet
- V-REP Quick User ManualDocument16 pagesV-REP Quick User Manualgfrutoss100% (1)
- Matlab - Slides - Lecture 5 + SolDocument21 pagesMatlab - Slides - Lecture 5 + SolKtk ZadNo ratings yet
- LeastSquares Fit in MatlabDocument64 pagesLeastSquares Fit in MatlabJohn GkanatsiosNo ratings yet
- Fourier Series LessonDocument41 pagesFourier Series Lessonjackson246No ratings yet
- Falkner SkanDocument16 pagesFalkner SkanBenedict EgboiyiNo ratings yet
- MCSL-016 Block-1 PDFDocument174 pagesMCSL-016 Block-1 PDFVenkataramanan SureshNo ratings yet
- Animation: I Am Vishal Kumar Tiwari - Web Designer (Trainee) HiDocument12 pagesAnimation: I Am Vishal Kumar Tiwari - Web Designer (Trainee) HiVishalkumartiwari …No ratings yet
- Integrating QT and OpenGLDocument39 pagesIntegrating QT and OpenGLVinayKumarNo ratings yet
- Summer Training ProjectDocument18 pagesSummer Training ProjectaviralNo ratings yet
- Flowcode Introductory Course PDFDocument12 pagesFlowcode Introductory Course PDFmawunyoNo ratings yet
- Matrix LaboratoryDocument66 pagesMatrix LaboratoryAvinash Nandakumar100% (1)
- Report For Mathwork Fileexchange PDFDocument29 pagesReport For Mathwork Fileexchange PDFShoaib chishty0% (1)
- QT Mobile Exercise BookDocument12 pagesQT Mobile Exercise BookMohammad Mohsen AmiriNo ratings yet
- Data-Oriented Design and C++ - Mike Acton - CppCon 2014Document201 pagesData-Oriented Design and C++ - Mike Acton - CppCon 2014c0derNo ratings yet
- Learning La Ravel 2Document180 pagesLearning La Ravel 2Eko RusfandiNo ratings yet
- Matlab Database Tool BoxDocument5 pagesMatlab Database Tool BoxI am legendNo ratings yet
- DLLDocument8 pagesDLLDusan Petrovic100% (1)
- The Inventor MentorDocument271 pagesThe Inventor MentorΑρετή ΣταματούρουNo ratings yet
- Compound CylinderDocument11 pagesCompound CylinderLiliana Ara GubanNo ratings yet
- Design of Smart Car Using LabviewDocument6 pagesDesign of Smart Car Using LabviewSrinivas VeeruNo ratings yet
- Getting Started OPENSEES PDFDocument15 pagesGetting Started OPENSEES PDFAngela WoodNo ratings yet
- C PRGRMNG MCQ PDFDocument164 pagesC PRGRMNG MCQ PDFMugdha KaleNo ratings yet
- Bairstow MethodDocument7 pagesBairstow MethodBrajendra SinghNo ratings yet
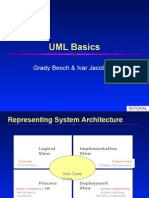
- UML Basics: Grady Booch & Ivar JacobsonDocument101 pagesUML Basics: Grady Booch & Ivar Jacobsongunasekaran.subramani3879100% (1)
- Simulink PLC Coder User's GuideDocument286 pagesSimulink PLC Coder User's GuidepeerawishNo ratings yet
- A Free MATLAB Alternative Called OctaveDocument6 pagesA Free MATLAB Alternative Called OctavemivanoNo ratings yet
- BootstrapDocument11 pagesBootstrapKidus DawitNo ratings yet
- Vue Developer Learning PathsDocument7 pagesVue Developer Learning Pathscastrow666No ratings yet
- Rails 101 2007Document341 pagesRails 101 2007-bNo ratings yet
- App Inventor Tutorials and Examples - Dynamic Table Layout - Pura Vida Apps PDFDocument4 pagesApp Inventor Tutorials and Examples - Dynamic Table Layout - Pura Vida Apps PDFAdewale RajiNo ratings yet
- Topological Sort in DelphiDocument8 pagesTopological Sort in DelphiBrummerNo ratings yet
- Data StructuresDocument182 pagesData StructuresMcaifNo ratings yet
- Principles of Compiler Design - Tutorial 9Document7 pagesPrinciples of Compiler Design - Tutorial 9dani cabiloNo ratings yet
- Introduction To MFC: ReferencesDocument26 pagesIntroduction To MFC: ReferencesmNo ratings yet
- C++ Fem Object OrientedDocument17 pagesC++ Fem Object OrientedTuýp Phờ NờNo ratings yet
- 8 File Handling in C'Document7 pages8 File Handling in C'api-372813683% (6)
- Mindfire Whitepaper - 5.0 LsDocument40 pagesMindfire Whitepaper - 5.0 LsAnonymous h1lwWPPNo ratings yet
- XPC Target™ Release NotesDocument108 pagesXPC Target™ Release NotesAhmed58seribegawanNo ratings yet
- C Code Generation For A MATLAB Kalman Filtering Algorithm - MATLAB & Simulink Example - MathWorks IndiaDocument8 pagesC Code Generation For A MATLAB Kalman Filtering Algorithm - MATLAB & Simulink Example - MathWorks IndiasureshNo ratings yet
- ASYCUDA World Installation Guide: Asycuda - Customs.gov - MVDocument2 pagesASYCUDA World Installation Guide: Asycuda - Customs.gov - MVsenahidNo ratings yet
- AngularJS Fundamentals BCC 2016Document46 pagesAngularJS Fundamentals BCC 2016Ramazan ErikliNo ratings yet
- Best Practise BackboneJSDocument5 pagesBest Practise BackboneJSNhut PhanNo ratings yet
- Computer NetworksDocument99 pagesComputer NetworksSahil Kumar AshatNo ratings yet
- Design PatternsDocument69 pagesDesign PatternsryanNo ratings yet
- Black Book IndexDocument30 pagesBlack Book IndexKumara Raja JettiNo ratings yet
- Introduction To MatlabDocument286 pagesIntroduction To MatlabXxbugmenotxXNo ratings yet
- SimulinkDocument20 pagesSimulinkEren Tutar100% (1)
- HTML TutorialDocument221 pagesHTML Tutorialvs_crniNo ratings yet
- Web DevelopmentDocument8 pagesWeb DevelopmentMohammed Zama KhanNo ratings yet
- Flexbox PDFDocument24 pagesFlexbox PDFtagadoNo ratings yet
- Parallel Computational Fluid Dynamics '93: New Trends and AdvancesFrom EverandParallel Computational Fluid Dynamics '93: New Trends and AdvancesJ. HauserNo ratings yet
- Nonlinear Control and Aerospace Applications 2x1Document333 pagesNonlinear Control and Aerospace Applications 2x1ciccio77777No ratings yet
- Autopilot Design With Root-LocusDocument36 pagesAutopilot Design With Root-LocusPythonraptorNo ratings yet
- EC6405 Control Systems EngineeringDocument30 pagesEC6405 Control Systems EngineeringAl-ShukaNo ratings yet
- Xcos Block ExercisesDocument99 pagesXcos Block ExercisesdummyNo ratings yet
- Designing Controller by State Space Techniques Using Reduced Order Model AlgorithmDocument5 pagesDesigning Controller by State Space Techniques Using Reduced Order Model AlgorithmGladiolus TranNo ratings yet
- Ann R16 Unit 2Document16 pagesAnn R16 Unit 2rashbari mNo ratings yet
- MPC of Four Tank SystemDocument7 pagesMPC of Four Tank Systemmail2saravanancNo ratings yet
- 9 Phase Plane Analysis of Non-Linear Autonomous Systems - CompleteDocument4 pages9 Phase Plane Analysis of Non-Linear Autonomous Systems - CompleteeeetistNo ratings yet
- Simulink IntroductionDocument21 pagesSimulink IntroductionHien Duong DangNo ratings yet
- Linear Inverted Pendulum - Workbook (Student) PDFDocument23 pagesLinear Inverted Pendulum - Workbook (Student) PDFDeepthi Priya BejjamNo ratings yet
- Systems TheoryDocument195 pagesSystems Theorydelenda3No ratings yet
- Ec8391-Control Systems Engineering-947551245-Cse QBDocument18 pagesEc8391-Control Systems Engineering-947551245-Cse QBMr. V. Buvanesh Pandian EIE-2019-A SEC BATCHNo ratings yet
- Block DiagramDocument7 pagesBlock DiagramShibin MathewNo ratings yet
- 55-7963 Control of Linear Systems Assignment - 1415 PDFDocument4 pages55-7963 Control of Linear Systems Assignment - 1415 PDFMB Fazli NisarNo ratings yet
- Direct Quadrate D-Q Modeling of 3-Phase PDFDocument7 pagesDirect Quadrate D-Q Modeling of 3-Phase PDFRuchir Pandey HSET, SRHUNo ratings yet
- Vehicle Suspension System Varnhagen Creed KahawatteDocument29 pagesVehicle Suspension System Varnhagen Creed KahawatteRanjeetNo ratings yet
- CSDDocument4 pagesCSDharryNo ratings yet
- E707 - Modern ControlDocument86 pagesE707 - Modern ControlRaji Bello UmarNo ratings yet
- 2021 Exam Ufmfw7153 Online Exams - 1705334350872Document11 pages2021 Exam Ufmfw7153 Online Exams - 1705334350872family7482pleaseNo ratings yet
- An Overview On Controllability Analysis of Chemical ProcessesDocument17 pagesAn Overview On Controllability Analysis of Chemical Processeshamidrezaee008No ratings yet
- PlanningDocument22 pagesPlanningsayeduNo ratings yet
- Hopf Bifurcation Analysis: 0 Frequency Domain ApproachDocument342 pagesHopf Bifurcation Analysis: 0 Frequency Domain ApproachWilliam VianaNo ratings yet
- Lab ExcerciseDocument5 pagesLab ExcerciseWeldush BrightNo ratings yet
- Merge 02Document18 pagesMerge 02Kartiki KodeNo ratings yet
- Salman - 2005 - Nonlinear Identification of Unmanned Aircraft VehicleDocument3 pagesSalman - 2005 - Nonlinear Identification of Unmanned Aircraft VehiclebrunocsouzaNo ratings yet
- L-2 - Controllability and ObservabiltyDocument13 pagesL-2 - Controllability and ObservabiltymerhawiNo ratings yet
- Design and Implementation of A 5 KW Photovoltaic System With Li-Ion Battery and Additional DC-DC ConverterDocument7 pagesDesign and Implementation of A 5 KW Photovoltaic System With Li-Ion Battery and Additional DC-DC ConverterSherif AhmedNo ratings yet
- Midya ThesisDocument156 pagesMidya ThesisDipanjan DasNo ratings yet
- Learning To Control An Inverted Pendulum Using Neural NetworksDocument7 pagesLearning To Control An Inverted Pendulum Using Neural NetworksAditya AgarwalNo ratings yet