You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5807)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Tensor CalculusDocument53 pagesTensor Calculusalehegny100% (1)
- Analytic SurfacesDocument109 pagesAnalytic SurfacesGabriela DogoterNo ratings yet
- Chapter 6 - COMPLEX STRESSDocument33 pagesChapter 6 - COMPLEX STRESSNurul Raihan Shahizan100% (1)
- Intro To Special Relativity & General Relivity Chapter 7Document8 pagesIntro To Special Relativity & General Relivity Chapter 7John nyangaNo ratings yet
- EXERCISE CoordinateDocument2 pagesEXERCISE CoordinatenazdylaNo ratings yet
- GRADE 8 NotesDocument5 pagesGRADE 8 NotesIya Sicat PatanoNo ratings yet
- Einstein Kaluza PR2 ArxivDocument22 pagesEinstein Kaluza PR2 ArxivAlessioRocciNo ratings yet
- Y1) +cz2-z) : 3. The PlaneDocument13 pagesY1) +cz2-z) : 3. The PlaneAmit Bikram MishraNo ratings yet
- CH2 Multiple IntegralsDocument74 pagesCH2 Multiple Integralszul hilmiNo ratings yet
- Notes On Curved Colloidal MembranesDocument7 pagesNotes On Curved Colloidal MembranesBengali MuslimNo ratings yet
- 15MA101 Calculus and Solid GeometryDocument2 pages15MA101 Calculus and Solid GeometryAravind Chandar BNo ratings yet
- Vector Excersice PDFDocument5 pagesVector Excersice PDFSiti Haja'sNo ratings yet
- Engg. Mathematics I (MAT - 101) RCS (Makeup) PDFDocument2 pagesEngg. Mathematics I (MAT - 101) RCS (Makeup) PDFWoof DawgmannNo ratings yet
- 01 Hay29956 ch01 p001-013 230415 233541Document1 page01 Hay29956 ch01 p001-013 230415 233541이준희 전자공학부 한양대(ERICA) No ratings yet
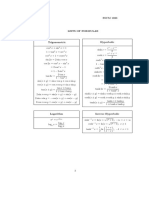
- List of Formulae Trigo-Sscm1023Document3 pagesList of Formulae Trigo-Sscm1023aieyinHengNo ratings yet
- Https Doc 00 7g Apps Viewer - GoogleusercontentDocument7 pagesHttps Doc 00 7g Apps Viewer - GoogleusercontentVignesh RavishankarNo ratings yet
- Areas and Lengths in Polar Coordinates - 10.4 - SolutionsDocument13 pagesAreas and Lengths in Polar Coordinates - 10.4 - SolutionsJaselle NamuagNo ratings yet
- Transformation of Plane StressDocument27 pagesTransformation of Plane StressDave Harrison FloresNo ratings yet
- PRECALCULUS (AutoRecovered)Document27 pagesPRECALCULUS (AutoRecovered)Gemver Baula BalbasNo ratings yet
- AssignmentDocument2 pagesAssignmentsyed02No ratings yet
- (Expository Notes) Zhihua Chang - Solutions To Some Exercises in The Book - J. E. Humphreys, An Introduction To Lie Algebras and Representation Theory - (2013) PDFDocument50 pages(Expository Notes) Zhihua Chang - Solutions To Some Exercises in The Book - J. E. Humphreys, An Introduction To Lie Algebras and Representation Theory - (2013) PDFGiorgio GaioliniNo ratings yet
- UPSC Civil Services Main 1997 - Mathematics Calculus: Sunder LalDocument7 pagesUPSC Civil Services Main 1997 - Mathematics Calculus: Sunder Lalsayhigaurav07No ratings yet
- Conic Sections: Parts of ConicsDocument16 pagesConic Sections: Parts of ConicsSophia AbendanNo ratings yet
- Chapter 6 Angles and Tangents of CirclesDocument40 pagesChapter 6 Angles and Tangents of CirclesHazmin NawiNo ratings yet
- Radius of Curvature and Evolute of The Function Y F (X) : DX DF DX Dy DX Ds DyDocument7 pagesRadius of Curvature and Evolute of The Function Y F (X) : DX DF DX Dy DX Ds DySaddam HusainNo ratings yet
- Map ProjectionsDocument31 pagesMap ProjectionsJeanelyn TomNo ratings yet
- The Principle of EquivalenceDocument23 pagesThe Principle of EquivalenceAnonymous 8buGHsNo ratings yet
- Calculus and Analytical GeometryDocument8 pagesCalculus and Analytical Geometrynep llNo ratings yet
- Analytical Geometry: XXXX X Yyyy y X yDocument7 pagesAnalytical Geometry: XXXX X Yyyy y X ymacs_smacNo ratings yet