You might also like
- 24386-ENDocument24 pages24386-ENMehedi HasanNo ratings yet
- DSA 2011 00815 - PPC 5660 - Technical Data SheetDocument1 pageDSA 2011 00815 - PPC 5660 - Technical Data SheetMehedi HasanNo ratings yet
- DSA 2011 03256 - Insulating StickDocument1 pageDSA 2011 03256 - Insulating StickMehedi HasanNo ratings yet
- USER'S MANUAL WELDING MACHINE-DH50-completDocument5 pagesUSER'S MANUAL WELDING MACHINE-DH50-completMehedi HasanNo ratings yet
- Installation and Maintenance Slewing Rings Special Bearings: RollixDocument6 pagesInstallation and Maintenance Slewing Rings Special Bearings: RollixMehedi HasanNo ratings yet
- Control System Functions OverviewDocument51 pagesControl System Functions OverviewAde Muhamad YunusNo ratings yet
- DSA 2011 01590 - HEMPADUR ZINC 15343 DatasheetDocument2 pagesDSA 2011 01590 - HEMPADUR ZINC 15343 DatasheetMehedi HasanNo ratings yet
- DSA 2011 01590 - HEMPATHANE 55210 DatasheetDocument2 pagesDSA 2011 01590 - HEMPATHANE 55210 DatasheetMehedi HasanNo ratings yet
- DSA 2011 01590 - Dynalarme DatasheetDocument4 pagesDSA 2011 01590 - Dynalarme DatasheetMehedi HasanNo ratings yet
- 2/2-Way Solenoid Valve With Servo-Diaphragm, G 1/2 - G 2 1/2Document4 pages2/2-Way Solenoid Valve With Servo-Diaphragm, G 1/2 - G 2 1/2MacakafkaNo ratings yet
- DSA 2011 03256 - Voltage Detector On StickDocument1 pageDSA 2011 03256 - Voltage Detector On StickMehedi HasanNo ratings yet
- DSA 2011 03256 - Safety LampDocument1 pageDSA 2011 03256 - Safety LampMehedi HasanNo ratings yet
- DDK 2011 00009 - Safety Guidelines For Resilient Seated Butterfly ValvesDocument9 pagesDDK 2011 00009 - Safety Guidelines For Resilient Seated Butterfly ValvesMehedi HasanNo ratings yet
- Lamella Supports Technical SpecificationsDocument15 pagesLamella Supports Technical SpecificationsMehedi HasanNo ratings yet
- 3.3 Control Circuit WiringDocument11 pages3.3 Control Circuit WiringMehedi HasanNo ratings yet
- BL2000 - STB PDFDocument197 pagesBL2000 - STB PDFJhon Lima80% (5)
- Inova Automation Pvt Ltd Door Drive Setup ManualDocument26 pagesInova Automation Pvt Ltd Door Drive Setup ManualMehedi HasanNo ratings yet
- Safety Data Sheet for Matrix 500 AdhesiveDocument4 pagesSafety Data Sheet for Matrix 500 AdhesiveMehedi HasanNo ratings yet
- 3.3 Control Circuit WiringDocument11 pages3.3 Control Circuit WiringMehedi HasanNo ratings yet
- 13.3 Electrical Diagram: Service Manual Refrigeration Dryers TD No.: 9 - 5778 01 EDocument10 pages13.3 Electrical Diagram: Service Manual Refrigeration Dryers TD No.: 9 - 5778 01 EMehedi HasanNo ratings yet
- 002a-X1 Terminal Layout (08.08.2012)Document1 page002a-X1 Terminal Layout (08.08.2012)Mehedi HasanNo ratings yet
- 13.4 Electrical Diagram: 9 - 9461 02 E Service Manual Screw Compressor SK Sigma Control 2Document17 pages13.4 Electrical Diagram: 9 - 9461 02 E Service Manual Screw Compressor SK Sigma Control 2Mehedi HasanNo ratings yet
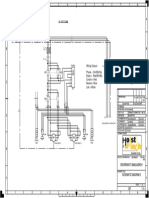
- 007a - Schematic Diagram 3 (08.08.2012)Document1 page007a - Schematic Diagram 3 (08.08.2012)Mehedi HasanNo ratings yet
- High-performance shrinkage bedding mortar data sheetDocument3 pagesHigh-performance shrinkage bedding mortar data sheetMehedi HasanNo ratings yet
- 003a-Typical Pendant Layout (08.08.2012) PDFDocument1 page003a-Typical Pendant Layout (08.08.2012) PDFMehedi HasanNo ratings yet
- EX42000 Series: 5-Port 10/100base Fast Ethernet Industrial Unmanaged Ethernet SwitchesDocument2 pagesEX42000 Series: 5-Port 10/100base Fast Ethernet Industrial Unmanaged Ethernet SwitchesMehedi HasanNo ratings yet
- L101 Xenon Beacon AlertAlight InstallationDocument1 pageL101 Xenon Beacon AlertAlight InstallationMehedi HasanNo ratings yet
- NSYS3D6620P: Note This Is A PDF File Printed To Fit As An A3 Sized Drawing. Printing May Not Be To ScaleDocument1 pageNSYS3D6620P: Note This Is A PDF File Printed To Fit As An A3 Sized Drawing. Printing May Not Be To ScaleMehedi HasanNo ratings yet
- HTP - G Operating ManualDocument4 pagesHTP - G Operating ManualVitor OlivettiNo ratings yet
- Rittal - 7394035 - RJ45 Patch PanelDocument1 pageRittal - 7394035 - RJ45 Patch PanelMehedi HasanNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Details PDF: Image Part Number Description Manufacturer QtyDocument1 pageDetails PDF: Image Part Number Description Manufacturer QtySamsung J2No ratings yet
- Digital Image Forensics Using Sensor Noise: Jessica FridrichDocument11 pagesDigital Image Forensics Using Sensor Noise: Jessica FridrichPushpa Mohan RajNo ratings yet
- Callate Gate 2: Parts List LayoutDocument1 pageCallate Gate 2: Parts List LayoutStefan HacknerNo ratings yet
- 4709 Outline f15Document2 pages4709 Outline f15ricedragonNo ratings yet
- Bansal Classes Study Core Material MODULE 3 IIT JEE 2012Document196 pagesBansal Classes Study Core Material MODULE 3 IIT JEE 2012siddharth1996No ratings yet
- Trouble Shooting of APFC PanelDocument3 pagesTrouble Shooting of APFC PanelVijay Kumar100% (2)
- Vlsi System DesignDocument12 pagesVlsi System DesignMahender GoudNo ratings yet
- SELECT RC102 ManualDocument2 pagesSELECT RC102 Manualabhaya2806No ratings yet
- c8051f340 ShortDocument1 pagec8051f340 Short陳進含No ratings yet
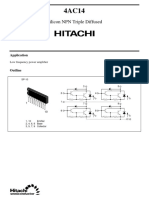
- Silicon NPN Triple Diffused: ApplicationDocument8 pagesSilicon NPN Triple Diffused: ApplicationMario Rosas VargasNo ratings yet
- FACTS CatalogDocument28 pagesFACTS CatalogAchint KumarNo ratings yet
- DD - Lecture 1 - PCDocument31 pagesDD - Lecture 1 - PCRaju ReddyNo ratings yet
- BC547 PDFDocument7 pagesBC547 PDFToño ParodNo ratings yet
- Design of Automatic Gate Control Using I PDFDocument7 pagesDesign of Automatic Gate Control Using I PDFnaseer449No ratings yet
- Isp MACH4128 VDocument74 pagesIsp MACH4128 VjyotiNo ratings yet
- 05how To Read A Synopsys Liberty FileDocument16 pages05how To Read A Synopsys Liberty FileHa TranNo ratings yet
- Physics 2ND Book TestDocument3 pagesPhysics 2ND Book TestDeepak GuptaNo ratings yet
- Chapter07 - Electronic Analysis of CMOS Logic GatesDocument38 pagesChapter07 - Electronic Analysis of CMOS Logic GatesRenukaNo ratings yet
- NTE950/951/977 100mA Voltage RegulatorsDocument3 pagesNTE950/951/977 100mA Voltage Regulatorsalexjcc10No ratings yet
- Power Factor Controllers Prophi by Janitza Electronics GMBHDocument9 pagesPower Factor Controllers Prophi by Janitza Electronics GMBHf.saglam77No ratings yet
- Reciprocal Operation of Ultrasonic Transducers Experimental ResultsDocument4 pagesReciprocal Operation of Ultrasonic Transducers Experimental Resultsishi888No ratings yet
- Advanced Materials - 2015 - Park - Bismuth Based Hybrid Perovskites A3Bi2I9 A Methylammonium or Cesium For Solar CellDocument9 pagesAdvanced Materials - 2015 - Park - Bismuth Based Hybrid Perovskites A3Bi2I9 A Methylammonium or Cesium For Solar CellSoham AshNo ratings yet
- Vilano Cacao ECE Experiment2 PDFDocument22 pagesVilano Cacao ECE Experiment2 PDFMonirachanthystNo ratings yet
- EPB ManualDocument86 pagesEPB ManualMohamed BnNo ratings yet
- Kvas 100Document98 pagesKvas 100Vikash Kumar PrasadNo ratings yet
- II-II - EM&I - Unit-IV - Question BankDocument5 pagesII-II - EM&I - Unit-IV - Question BankRachananjali Kunamneni KethineniNo ratings yet
- Heat Transfer Problems and SolutionsDocument2 pagesHeat Transfer Problems and SolutionsPuneet MeenaNo ratings yet
- Study PAM Generation and CharacteristicsDocument9 pagesStudy PAM Generation and CharacteristicsGaurav Kumar GoyalNo ratings yet
- Honor 8x (Hl1jsnm) PCB LayoutDocument2 pagesHonor 8x (Hl1jsnm) PCB Layoutfrancisco juniorNo ratings yet
- 1Document40 pages1Vladimir BecejacNo ratings yet