You might also like
- ECO Manual (CN En)Document55 pagesECO Manual (CN En)thi tran100% (1)
- IMS MD20 ES English ManualDocument21 pagesIMS MD20 ES English ManualinfoNo ratings yet
- Manual Price $35.00 PDI Series Power Drive Intermediate Lift Truck ManualDocument152 pagesManual Price $35.00 PDI Series Power Drive Intermediate Lift Truck ManualDmitryNo ratings yet
- BL2000 - STB PDFDocument197 pagesBL2000 - STB PDFJhon Lima80% (5)
- Control System Functions OverviewDocument51 pagesControl System Functions OverviewAde Muhamad YunusNo ratings yet
- Gearless JSA07910E-AA BST BG201 Adjust Manual PDFDocument33 pagesGearless JSA07910E-AA BST BG201 Adjust Manual PDFHamza KefayahNo ratings yet
- Bg101 User Manual1Document22 pagesBg101 User Manual1MikeNo ratings yet
- P9000+ Electrical Drawing (V2Document9 pagesP9000+ Electrical Drawing (V2Suong TranNo ratings yet
- INOVA AUTOMATION MANUALDocument7 pagesINOVA AUTOMATION MANUALKs BharathiyarNo ratings yet
- Error TableDocument19 pagesError TableJesús David Diaz MontesNo ratings yet
- Drawing Number: Code: Pages MN11001BTDocument23 pagesDrawing Number: Code: Pages MN11001BTJesús David Diaz MontesNo ratings yet
- Arcode Geared Sp-16 Cpc-T.enDocument38 pagesArcode Geared Sp-16 Cpc-T.enAbdallh YassenNo ratings yet
- Invt DrivesDocument24 pagesInvt Drivesusmanakhter466No ratings yet
- TrioTF4616B Vibrating Grizzly Feeder Manual (SN. 144)Document38 pagesTrioTF4616B Vibrating Grizzly Feeder Manual (SN. 144)GUILLERMO OSIMANINo ratings yet
- FILE 20221010 095658 X11joDocument22 pagesFILE 20221010 095658 X11joNguyễn ThànhNo ratings yet
- Technical Manual and Electronical Regulation Vvvf-4: Cabin DoorsDocument7 pagesTechnical Manual and Electronical Regulation Vvvf-4: Cabin DoorsMaicol Rodolfo CaizaNo ratings yet
- Integrated Door Motor Controller User Manual: Shenyang Bluelight Automatic Technology Co., LTDDocument56 pagesIntegrated Door Motor Controller User Manual: Shenyang Bluelight Automatic Technology Co., LTDJulio Cesar GonzalezNo ratings yet
- Instruction Manual For BLT Armeg Group Control System: SERIAL NO. GNCG0002Document33 pagesInstruction Manual For BLT Armeg Group Control System: SERIAL NO. GNCG0002Cristian de LeonNo ratings yet
- EC20 Elevator Door Controller Technical DocumentationDocument83 pagesEC20 Elevator Door Controller Technical DocumentationRebecca DangNo ratings yet
- Monarch Electrical Drawing - enDocument35 pagesMonarch Electrical Drawing - enMaximiliano Merino SánchezNo ratings yet
- A NICE3000new 2018Document203 pagesA NICE3000new 2018Bahodur ToshevNo ratings yet
- Diagram Fx3u Yaskawa Fuji 01 2017Document10 pagesDiagram Fx3u Yaskawa Fuji 01 2017Dhany ElectronicNo ratings yet
- PM DOOR DRIVE TUNING GUIDEDocument4 pagesPM DOOR DRIVE TUNING GUIDEKrishna RadhaNo ratings yet
- VR VRSF Vre 244989-EnglishDocument686 pagesVR VRSF Vre 244989-EnglishАлександра Кваснина100% (1)
- B. Fault-FindingDocument29 pagesB. Fault-FindingJesús David Diaz MontesNo ratings yet
- Schematic Diagram MCB-V6-En Ver.18.06 Rev.1 (GEEC)Document44 pagesSchematic Diagram MCB-V6-En Ver.18.06 Rev.1 (GEEC)Mohamed AdamNo ratings yet
- GMU-01A User Manual (V300R002 - 02)Document39 pagesGMU-01A User Manual (V300R002 - 02)YANdalf92% (12)
- Manual Agy-Ev GBDocument214 pagesManual Agy-Ev GBstankovukanovicNo ratings yet
- Prepared Oyama (July 2012) Rev. WIG-21 Checked T.Natsume Checked K.HaraDocument18 pagesPrepared Oyama (July 2012) Rev. WIG-21 Checked T.Natsume Checked K.HaraEtienneNo ratings yet
- Manual EC20 (English) PDFDocument79 pagesManual EC20 (English) PDFDalat TigonNo ratings yet
- New Door InverterDocument20 pagesNew Door InverterRubel MiahNo ratings yet
- MCTC-KZ-B0S To Customer Side Protocol Details V1.2Document14 pagesMCTC-KZ-B0S To Customer Side Protocol Details V1.2John ClarenceNo ratings yet
- Cocor Scheme OrientativeDocument49 pagesCocor Scheme Orientativetehnocert adi100% (1)
- D10D632 Electrical Schematic diagram-ENDocument31 pagesD10D632 Electrical Schematic diagram-ENPrakashNo ratings yet
- Mdx36Range: Installation, Use and Maintenance GearlessDocument36 pagesMdx36Range: Installation, Use and Maintenance GearlessANTONIO ROSARIO ESCUDERONo ratings yet
- MP-60 Service Manul V1.0Document69 pagesMP-60 Service Manul V1.0samuellv 80 arboleda100% (2)
- Yaskawa: Power 24VDC, 5VDCDocument1 pageYaskawa: Power 24VDC, 5VDCNghia Huynh HoangNo ratings yet
- AS320 InverterDocument43 pagesAS320 Inverterthi tranNo ratings yet
- Torin Drive ManualDocument9 pagesTorin Drive ManualRebecca DangNo ratings yet
- Nice 3000Document98 pagesNice 3000NAIMUR RAHAMANNo ratings yet
- BST2100 Technical ManualDocument18 pagesBST2100 Technical ManualOsama OdehNo ratings yet
- Manual de PuertasDocument32 pagesManual de PuertasCarlos PrietoNo ratings yet
- Eng Sicor Catalogue GearlessDocument52 pagesEng Sicor Catalogue GearlessEmeka Pius OramunwaNo ratings yet
- Arcode ENDocument35 pagesArcode ENCheikh BendaoudNo ratings yet
- Nice 9000Document91 pagesNice 9000Samuel AcevedoNo ratings yet
- BL-U Series Integrated Controller Quick Commissioning GuideDocument32 pagesBL-U Series Integrated Controller Quick Commissioning GuideRandy VanegasNo ratings yet
- Gate Controller Manual: AAD03010 Frequency Control SystemDocument17 pagesGate Controller Manual: AAD03010 Frequency Control SystemKen LeeNo ratings yet
- SEMIAUTOMATIC VVVF Car Door +coupler at Landing DoorDocument3 pagesSEMIAUTOMATIC VVVF Car Door +coupler at Landing DoorAhmad MohammadNo ratings yet
- Jarless Con Door DriveDocument1 pageJarless Con Door Drivewakeel ahmedNo ratings yet
- Ac Series AybeyDocument76 pagesAc Series AybeyMohamed SaadNo ratings yet
- NICE 1000 Elevator Integrated Controller User Manual 31Document1 pageNICE 1000 Elevator Integrated Controller User Manual 311meander23No ratings yet
- Title DI1 (60 105m/min) Annunciator Function Setting ModeDocument12 pagesTitle DI1 (60 105m/min) Annunciator Function Setting ModeQuang Pham DuyNo ratings yet
- Programming lift systemsDocument8 pagesProgramming lift systemsBojan DrljachaNo ratings yet
- ZAdynpro & Arl 700 SchemaDocument20 pagesZAdynpro & Arl 700 SchemaEdhimj UnmeNo ratings yet
- V2 2-V2 6Document5 pagesV2 2-V2 6Trần Đức HoàngNo ratings yet
- Hotel Santika - Tmii 4LTDocument24 pagesHotel Santika - Tmii 4LTGogik AntoNo ratings yet
- Wire Ferules Description Fuji Fuji Name Digital Input Analog InputDocument1 pageWire Ferules Description Fuji Fuji Name Digital Input Analog InputMohammed SajidNo ratings yet
- 07 IRIS NV PCB OtherDocument15 pages07 IRIS NV PCB OtherArnaldo cordovaNo ratings yet
- SJG06 017 (11) GRACE01 by MengdeDocument24 pagesSJG06 017 (11) GRACE01 by MengdeБахтияр АбдуразаковNo ratings yet
- Button Function and Parameter Settings for Door ControllerDocument24 pagesButton Function and Parameter Settings for Door ControllerBâlâ BøbbyNo ratings yet
- Nice 900 Quick Set Up For Purna MotorDocument4 pagesNice 900 Quick Set Up For Purna MotorSuresh MNo ratings yet
- ARCODE Priority Service Mode V10.EnDocument4 pagesARCODE Priority Service Mode V10.EnHenri KleineNo ratings yet
- 1-Parameter Documents (Close Loop)Document1 page1-Parameter Documents (Close Loop)oro plataNo ratings yet
- "Electronic Technology": Revolution 81/20 Lift Control Card User GuideDocument24 pages"Electronic Technology": Revolution 81/20 Lift Control Card User GuidetoufikNo ratings yet
- Microzed Hydraulic Wiring Diagrams SummaryDocument7 pagesMicrozed Hydraulic Wiring Diagrams SummaryJouny WaelNo ratings yet
- LM 3 ParameterliftDocument1 pageLM 3 ParameterliftVinay SharmaNo ratings yet
- Elevator Control Card: User ManualDocument26 pagesElevator Control Card: User ManualГариб Мед100% (1)
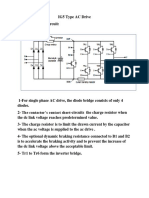
- Lect 4 PDFDocument14 pagesLect 4 PDFSaif AlabdullahNo ratings yet
- DSA 2011 00815 - PPC 5660 - Technical Data SheetDocument1 pageDSA 2011 00815 - PPC 5660 - Technical Data SheetMehedi HasanNo ratings yet
- Installation and Maintenance Slewing Rings Special Bearings: RollixDocument6 pagesInstallation and Maintenance Slewing Rings Special Bearings: RollixMehedi HasanNo ratings yet
- DSA 2011 03256 - Insulating StickDocument1 pageDSA 2011 03256 - Insulating StickMehedi HasanNo ratings yet
- DSA 2011 01590 - HEMPADUR ZINC 15343 DatasheetDocument2 pagesDSA 2011 01590 - HEMPADUR ZINC 15343 DatasheetMehedi HasanNo ratings yet
- 2/2-Way Solenoid Valve With Servo-Diaphragm, G 1/2 - G 2 1/2Document4 pages2/2-Way Solenoid Valve With Servo-Diaphragm, G 1/2 - G 2 1/2MacakafkaNo ratings yet
- DSA 2011 01590 - HEMPATHANE 55210 DatasheetDocument2 pagesDSA 2011 01590 - HEMPATHANE 55210 DatasheetMehedi HasanNo ratings yet
- 24386-ENDocument24 pages24386-ENMehedi HasanNo ratings yet
- DSA 2011 01590 - Dynalarme DatasheetDocument4 pagesDSA 2011 01590 - Dynalarme DatasheetMehedi HasanNo ratings yet
- DSA 2011 03256 - Voltage Detector On StickDocument1 pageDSA 2011 03256 - Voltage Detector On StickMehedi HasanNo ratings yet
- Lamella Supports Technical SpecificationsDocument15 pagesLamella Supports Technical SpecificationsMehedi HasanNo ratings yet
- DSA 2011 03256 - Safety LampDocument1 pageDSA 2011 03256 - Safety LampMehedi HasanNo ratings yet
- 3.3 Control Circuit WiringDocument11 pages3.3 Control Circuit WiringMehedi HasanNo ratings yet
- USER'S MANUAL WELDING MACHINE-DH50-completDocument5 pagesUSER'S MANUAL WELDING MACHINE-DH50-completMehedi HasanNo ratings yet
- DDK 2011 00009 - Safety Guidelines For Resilient Seated Butterfly ValvesDocument9 pagesDDK 2011 00009 - Safety Guidelines For Resilient Seated Butterfly ValvesMehedi HasanNo ratings yet
- Safety Data Sheet for Matrix 500 AdhesiveDocument4 pagesSafety Data Sheet for Matrix 500 AdhesiveMehedi HasanNo ratings yet
- 13.4 Electrical Diagram: 9 - 9461 02 E Service Manual Screw Compressor SK Sigma Control 2Document17 pages13.4 Electrical Diagram: 9 - 9461 02 E Service Manual Screw Compressor SK Sigma Control 2Mehedi HasanNo ratings yet
- High-performance shrinkage bedding mortar data sheetDocument3 pagesHigh-performance shrinkage bedding mortar data sheetMehedi HasanNo ratings yet
- NSYS3D6620P: Note This Is A PDF File Printed To Fit As An A3 Sized Drawing. Printing May Not Be To ScaleDocument1 pageNSYS3D6620P: Note This Is A PDF File Printed To Fit As An A3 Sized Drawing. Printing May Not Be To ScaleMehedi HasanNo ratings yet
- 3.3 Control Circuit WiringDocument11 pages3.3 Control Circuit WiringMehedi HasanNo ratings yet
- 13.3 Electrical Diagram: Service Manual Refrigeration Dryers TD No.: 9 - 5778 01 EDocument10 pages13.3 Electrical Diagram: Service Manual Refrigeration Dryers TD No.: 9 - 5778 01 EMehedi HasanNo ratings yet
- L101 Xenon Beacon AlertAlight InstallationDocument1 pageL101 Xenon Beacon AlertAlight InstallationMehedi HasanNo ratings yet
- 007a - Schematic Diagram 3 (08.08.2012)Document1 page007a - Schematic Diagram 3 (08.08.2012)Mehedi HasanNo ratings yet
- EX42000 Series: 5-Port 10/100base Fast Ethernet Industrial Unmanaged Ethernet SwitchesDocument2 pagesEX42000 Series: 5-Port 10/100base Fast Ethernet Industrial Unmanaged Ethernet SwitchesMehedi HasanNo ratings yet
- HTP - G Operating ManualDocument4 pagesHTP - G Operating ManualVitor OlivettiNo ratings yet
- 003a-Typical Pendant Layout (08.08.2012) PDFDocument1 page003a-Typical Pendant Layout (08.08.2012) PDFMehedi HasanNo ratings yet
- 002a-X1 Terminal Layout (08.08.2012)Document1 page002a-X1 Terminal Layout (08.08.2012)Mehedi HasanNo ratings yet
- Rittal - 7394035 - RJ45 Patch PanelDocument1 pageRittal - 7394035 - RJ45 Patch PanelMehedi HasanNo ratings yet
- Tabletop CNC Wire Bender Machine Using DXF by Generating CNC CodesDocument4 pagesTabletop CNC Wire Bender Machine Using DXF by Generating CNC CodesPrasanna RahmaniacNo ratings yet
- HFDSR Technical DatasheetDocument1 pageHFDSR Technical DatasheetSulistyono SulistyonoNo ratings yet
- EE6604-DEM AT I QPDocument3 pagesEE6604-DEM AT I QParshadbayaNo ratings yet
- SAM DA 400 07N P1N D SERVO DRIVE Atlas CopcoDocument96 pagesSAM DA 400 07N P1N D SERVO DRIVE Atlas CopcoMazarel AurelNo ratings yet
- Whirlpool AWE 6316 Service Manual Technical DataDocument20 pagesWhirlpool AWE 6316 Service Manual Technical Dataangel miguel rodriguez moralesNo ratings yet
- S1.2 2009Document12 pagesS1.2 2009MustafaNo ratings yet
- Components Catalogue ElectronicsDocument124 pagesComponents Catalogue ElectronicschalogdNo ratings yet
- EE132 Lab1 OL Vs CLDocument3 pagesEE132 Lab1 OL Vs CLthinkberry22No ratings yet
- Bluetooth Controlled Arduino Robotic Arm JournalDocument6 pagesBluetooth Controlled Arduino Robotic Arm JournalKarneshwar SannamaniNo ratings yet
- Rissala Electric Motors - Current ProductsDocument9 pagesRissala Electric Motors - Current ProductsNancyNo ratings yet
- Milwaukee Power Tool Catalogue 2021Document112 pagesMilwaukee Power Tool Catalogue 2021Jose Carlos SoaresNo ratings yet
- IEC Duty Cycles PDFDocument1 pageIEC Duty Cycles PDFdhruvNo ratings yet
- Ultrasonic MotorsDocument46 pagesUltrasonic MotorsRitu Raj50% (2)
- Flowserve User Instructions (Pump)Document68 pagesFlowserve User Instructions (Pump)Marco Antonio Hernandez MotaNo ratings yet
- ATV310 User Manual en 201601Document121 pagesATV310 User Manual en 201601ch prabuNo ratings yet
- DC MachinesDocument16 pagesDC MachinesAuthorized EarthlingNo ratings yet
- E-Tron Doerr2019Document25 pagesE-Tron Doerr2019mihai_1957No ratings yet
- AE2425Z Technical DataDocument4 pagesAE2425Z Technical DataMageon7No ratings yet
- Caryaire LVLS Catalogue 2020Document4 pagesCaryaire LVLS Catalogue 2020Dinesh kumarNo ratings yet
- Assignment 3 PhysicsDocument19 pagesAssignment 3 Physicsharshitaraghav509No ratings yet
- Bachelor of Technology: " Railway Crack Track Detection"Document18 pagesBachelor of Technology: " Railway Crack Track Detection"Huxtle RahulNo ratings yet
- Salminen NikoDocument26 pagesSalminen Nikohashem AliNo ratings yet
- Unit 1 EDCDocument22 pagesUnit 1 EDCDr Harsha AnantwarNo ratings yet
- ECE330 Final Exam Sample FormulaSheetDocument2 pagesECE330 Final Exam Sample FormulaSheetNguyễn TàiNo ratings yet