You might also like
- CFDDocument59 pagesCFDSabrinaFuschetto0% (1)
- Deep Beam Design ExampleDocument7 pagesDeep Beam Design ExampleLe Minh Thanh50% (2)
- Finite Volume Book PDFDocument237 pagesFinite Volume Book PDFRajesh SharmaNo ratings yet
- An Overview of The Guide To The Expression of Uncertainty in MeasurementDocument15 pagesAn Overview of The Guide To The Expression of Uncertainty in MeasurementeameclNo ratings yet
- Steel 2141967Document388 pagesSteel 2141967Seifeldin Ali Marzouk100% (1)
- CIVL4750 Numerical Solutions To Geotechnical Problems Lecture 2Document33 pagesCIVL4750 Numerical Solutions To Geotechnical Problems Lecture 2hktang1802No ratings yet
- Res Sim ExamDocument21 pagesRes Sim Examweldsv1100% (1)
- CFD MCQ QP and AnswerDocument16 pagesCFD MCQ QP and AnswermsloveindiaNo ratings yet
- Time HistoryDocument7 pagesTime HistoryshivamomshantiNo ratings yet
- Lecture 13: Frequency Domain Solution: 1. Steady-State Solution For Complex Forcing FunctionDocument8 pagesLecture 13: Frequency Domain Solution: 1. Steady-State Solution For Complex Forcing FunctionBaburaj AlampilliNo ratings yet
- Lecture 6: Modal SuperpositionDocument14 pagesLecture 6: Modal SuperpositionVikram PavuluriNo ratings yet
- Lecture 24: Finite Element Method: Beams and FramesDocument8 pagesLecture 24: Finite Element Method: Beams and Framesali381No ratings yet
- Lecture 12: Discrete Fourier Transform (Optional)Document8 pagesLecture 12: Discrete Fourier Transform (Optional)Baburaj AlampilliNo ratings yet
- Lecture On Vibration PDFDocument298 pagesLecture On Vibration PDFAbdul Hamid BhattiNo ratings yet
- Lecture 5: Damped Free Vibration (Optional) : Reading Materials: Section 2.2Document4 pagesLecture 5: Damped Free Vibration (Optional) : Reading Materials: Section 2.2Baburaj AlampilliNo ratings yet
- Lecture 11: Time Frequency Signals: 1. Time Domain Vibration SignalDocument12 pagesLecture 11: Time Frequency Signals: 1. Time Domain Vibration SignalBaburaj AlampilliNo ratings yet
- Bandaging and Transferring RubricsDocument3 pagesBandaging and Transferring Rubricsnella rapanutNo ratings yet
- Cpe 221 - Numerical Methods: Not For SaleDocument15 pagesCpe 221 - Numerical Methods: Not For SaleChristina LuluquisinNo ratings yet
- Novel Explicit Time Integration Schemes For Effi 2020 International JournalDocument16 pagesNovel Explicit Time Integration Schemes For Effi 2020 International JournalWooram KimNo ratings yet
- Lecture 25: Large Scale Systems: 1. Guyan ReductionDocument6 pagesLecture 25: Large Scale Systems: 1. Guyan Reductionali381No ratings yet
- Applied Model Predictive Control - A Brief Guide Do MATLAB/Simulink MPC ToolboxDocument66 pagesApplied Model Predictive Control - A Brief Guide Do MATLAB/Simulink MPC ToolboxVISWANATHAN KALYANRAM100% (1)
- Numerical Evaluation of Dynamic ResponseDocument20 pagesNumerical Evaluation of Dynamic Responsemacynthia26No ratings yet
- Satisfiability Modulo Theories: Introduction and ApplicationsDocument9 pagesSatisfiability Modulo Theories: Introduction and ApplicationsshastryNo ratings yet
- Expected Monetary Value (EMV) Calculation StepsDocument4 pagesExpected Monetary Value (EMV) Calculation StepsApurva JawadeNo ratings yet
- Instant Download With Answers Cornerstones of Cost Management 2nd Edition by Don R. Hansen Sample TestDocument51 pagesInstant Download With Answers Cornerstones of Cost Management 2nd Edition by Don R. Hansen Sample TestNicole Daphne FigueroaNo ratings yet
- 1forecasting MethodsDocument34 pages1forecasting Methodsadesh guliaNo ratings yet
- The Art of Process-Centric ModelingDocument342 pagesThe Art of Process-Centric ModelingAkshay RanadeNo ratings yet
- Case Study, Partial 1 Application of Mathematics For Engineering in Engineering Mechatronics.Document13 pagesCase Study, Partial 1 Application of Mathematics For Engineering in Engineering Mechatronics.JIMENA GARCIA MACIASNo ratings yet
- Unit 3 Complexity of Algorithms: Structure NosDocument27 pagesUnit 3 Complexity of Algorithms: Structure NosakshayvermaNo ratings yet
- 2102 Final Exam PASS SessionDocument37 pages2102 Final Exam PASS SessionBobNo ratings yet
- Real-Time Optimization and Nonlinear Model Predictive Control of Processes Governed by Differential-Algebraic EquationsDocument9 pagesReal-Time Optimization and Nonlinear Model Predictive Control of Processes Governed by Differential-Algebraic EquationsIngole DeepakNo ratings yet
- Minimal Repetition Dynamic Checkpointing Algorithm For Unsteady Adjoint CalculationDocument19 pagesMinimal Repetition Dynamic Checkpointing Algorithm For Unsteady Adjoint CalculationJakub SliacanNo ratings yet
- Momentary Time Sampling Form Clients Name: - Behavior DefinitionDocument2 pagesMomentary Time Sampling Form Clients Name: - Behavior DefinitionDiệu Hoa TrầnNo ratings yet
- Che 411 Class 1-2Document30 pagesChe 411 Class 1-2David AkomolafeNo ratings yet
- Chapter 8 StatDocument20 pagesChapter 8 StatThe BoxNo ratings yet
- Assignment W12Document8 pagesAssignment W12Pathi Narasimha saiNo ratings yet
- Dimension AnalysisDocument63 pagesDimension AnalysisJonny SinclairNo ratings yet
- Table of ContentDocument21 pagesTable of ContentAzmiMamatNo ratings yet
- Ch. 3 Key Concepts - Calculus Volume 2 - OpenStaxDocument2 pagesCh. 3 Key Concepts - Calculus Volume 2 - OpenStaxbmessaad1970No ratings yet
- DONE - CS604-Quiz 2 SolutionDocument8 pagesDONE - CS604-Quiz 2 Solutionprofessional.ca728No ratings yet
- UNIT 3-Bayesian StatisticsDocument80 pagesUNIT 3-Bayesian StatisticsfhjhgjhNo ratings yet
- A Module On Introduction and Measuring Errors in Numerical Methods PDFDocument32 pagesA Module On Introduction and Measuring Errors in Numerical Methods PDFMaria ThereseNo ratings yet
- Orders of Reactions - Rate LawsDocument17 pagesOrders of Reactions - Rate LawsJillian PeteNo ratings yet
- CAP536 - Real Time Software and Systems HW-2: Content of Homework Should Start From This Page OnlyDocument7 pagesCAP536 - Real Time Software and Systems HW-2: Content of Homework Should Start From This Page OnlySurendra Singh ChauhanNo ratings yet
- Viva Questions For DAA UoPDocument10 pagesViva Questions For DAA UoPSuparnaNo ratings yet
- Decision Science NotesDocument11 pagesDecision Science NotesMrugendraNo ratings yet
- DAA - NotesDocument188 pagesDAA - NotesnbprNo ratings yet
- Ok, I Agree With Your Point of View That Experimentation Consists of Many StepsDocument3 pagesOk, I Agree With Your Point of View That Experimentation Consists of Many StepsQuoc-Khanh NguyenNo ratings yet
- Fast Numerical Methods For Mixed-Integer Nonlinear Model-Predictive ControlDocument380 pagesFast Numerical Methods For Mixed-Integer Nonlinear Model-Predictive ControlDaniel Suarez ReyesNo ratings yet
- Notes - Numerical Methods: 1. Basic Concepts in Numerical AnalysisDocument6 pagesNotes - Numerical Methods: 1. Basic Concepts in Numerical Analysissumit_raisedNo ratings yet
- PlanDocument3 pagesPlanAlexander BennettNo ratings yet
- Renewal OptimizationDocument14 pagesRenewal Optimizationbadside badsideNo ratings yet
- Exam Part2exam MergedDocument49 pagesExam Part2exam Mergedprinceronnel93No ratings yet
- COMP3 New Revision Guide UpdatedDocument72 pagesCOMP3 New Revision Guide UpdatedAlex JonesNo ratings yet
- 1 s2.0 S0016003223002533 MainDocument26 pages1 s2.0 S0016003223002533 Maincepheid_luNo ratings yet
- MATH2059 - Ozge KK-Chapter1Document34 pagesMATH2059 - Ozge KK-Chapter1demir ermanNo ratings yet
- Quantitative TechniquesDocument9 pagesQuantitative Techniquessatishvarma142100% (1)
- QPOL - s42005 021 00684 3Document8 pagesQPOL - s42005 021 00684 3roi.ho2706No ratings yet
- Complete Textile Mechanics LabDocument47 pagesComplete Textile Mechanics LabEngr Mujahid MehdiNo ratings yet
- Understanding The Decision Rule What Is A Decision Rule?Document13 pagesUnderstanding The Decision Rule What Is A Decision Rule?Amit RanjanNo ratings yet
- Lecture 7 - Experiments and ImplementationDocument31 pagesLecture 7 - Experiments and ImplementationBrian GnorldanNo ratings yet
- AI in Smart Energy Systems Lecture 9 NotesDocument5 pagesAI in Smart Energy Systems Lecture 9 NotesKashif SubhanNo ratings yet
- Bio Control SystemDocument87 pagesBio Control SystemRajeevSangamNo ratings yet
- Chapter OneDocument4 pagesChapter OnehabteNo ratings yet
- Evaluating of Path-Dependent Securities With Low Discrepancy MethodsDocument65 pagesEvaluating of Path-Dependent Securities With Low Discrepancy MethodsKranthi KiranNo ratings yet
- Add Sequential Construction CasesDocument3 pagesAdd Sequential Construction CasesLe Minh ThanhNo ratings yet
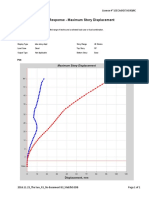
- Story Response - Maximum Story Displacement: ETABS 2015 15.2.0 License # 1CECA6XD7AG9QNCDocument7 pagesStory Response - Maximum Story Displacement: ETABS 2015 15.2.0 License # 1CECA6XD7AG9QNCLe Minh ThanhNo ratings yet
- Betong - Le Dinh QuocDocument32 pagesBetong - Le Dinh QuocLe Minh ThanhNo ratings yet
- FTCS Nutshell PDFDocument2 pagesFTCS Nutshell PDFaseman1228No ratings yet
- Mewar University Chittorgarh (Rajasthan) Faculty of Engineering and TechnologyDocument39 pagesMewar University Chittorgarh (Rajasthan) Faculty of Engineering and TechnologySourin SatpathiNo ratings yet
- CFD EM C4 FiniteDifferenceMethodDocument13 pagesCFD EM C4 FiniteDifferenceMethodMinh TrựcNo ratings yet
- Final PaperDocument8 pagesFinal PaperROCKET BOYS 2K18No ratings yet
- Nptel: NOC:Computational Electromagnetics & Applications - Video CourseDocument3 pagesNptel: NOC:Computational Electromagnetics & Applications - Video CoursePhani KumarNo ratings yet
- Finite Difference Method 1Document104 pagesFinite Difference Method 1Snehasis GhoshNo ratings yet
- Shrodinger EqDocument22 pagesShrodinger Eqawais33306No ratings yet
- Finite Difference Method - Python Numerical MethodsDocument5 pagesFinite Difference Method - Python Numerical MethodsAmal ZakirNo ratings yet
- Numerical Solution of The Fokker Planck Equation Using Moving Finite ElementsDocument14 pagesNumerical Solution of The Fokker Planck Equation Using Moving Finite Elementsjuan carlos molano toroNo ratings yet
- Lecture 3 - ODE (BVP) - Finite DifferenceDocument31 pagesLecture 3 - ODE (BVP) - Finite DifferencereynaldiNo ratings yet
- Assignment1 PDFDocument4 pagesAssignment1 PDFVuyoNo ratings yet
- Academic Regulations Course Structure and Detailed Syllabus: (Two Years Full Time Programme)Document55 pagesAcademic Regulations Course Structure and Detailed Syllabus: (Two Years Full Time Programme)Vincent LinzieNo ratings yet
- Numerical Solutions of The SCHR Odinger Equation: Kevin Giovanni Hern Andez Beltr AnDocument32 pagesNumerical Solutions of The SCHR Odinger Equation: Kevin Giovanni Hern Andez Beltr AnKevinHdezNo ratings yet
- Funwave TVD 3.0Document89 pagesFunwave TVD 3.0王馨儀No ratings yet
- CG01 FEM in Geotechnical EngineeringDocument20 pagesCG01 FEM in Geotechnical EngineeringRangga Destriyasa PutraNo ratings yet
- L04 - 2D Finite Difference MethodDocument73 pagesL04 - 2D Finite Difference MethodSulaiman AL MajdubNo ratings yet
- Algorithms of Scientific Computing II: 3. Algebraic Multigrid MethodsDocument51 pagesAlgorithms of Scientific Computing II: 3. Algebraic Multigrid MethodsFelipe GuerraNo ratings yet
- Course Contents Full Copy MA MSCDocument21 pagesCourse Contents Full Copy MA MSCwahabmathsNo ratings yet
- Numerical Valuation of Euro and American Options Under Kou's Jump-Diffusion ModelDocument24 pagesNumerical Valuation of Euro and American Options Under Kou's Jump-Diffusion Modelafakeemail7No ratings yet
- George Parker Lamptey PDFDocument101 pagesGeorge Parker Lamptey PDFcentkiloNo ratings yet
- In The Heat DiffusionConduction Equation, How To Extend The Validity of The Dirichlet Boundary Conditions To More Than One Dimensional Geometric SpaceDocument19 pagesIn The Heat DiffusionConduction Equation, How To Extend The Validity of The Dirichlet Boundary Conditions To More Than One Dimensional Geometric SpaceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- CHAPTER 3 - RevisedDocument26 pagesCHAPTER 3 - RevisedMohammedNo ratings yet
- Finite Difference Method: Computational Electromagnetics (CEM)Document25 pagesFinite Difference Method: Computational Electromagnetics (CEM)adfallNo ratings yet
- Finite Difference Heat Transfer Analyses in ExcelDocument6 pagesFinite Difference Heat Transfer Analyses in ExcelMariano NathanaelNo ratings yet
- CMP T1Document261 pagesCMP T1Aditi KaradeNo ratings yet