You might also like
- REVIEW Lecture 21:: - End of Time-Marching Methods: Higher-Order MethodsDocument23 pagesREVIEW Lecture 21:: - End of Time-Marching Methods: Higher-Order MethodscostpopNo ratings yet
- Numerical Methods in CFDDocument40 pagesNumerical Methods in CFDrushikumarNo ratings yet
- Numerical Methods in Computational Fluid Dynamics (CFD) : Maysam Mousaviraad, Tao Xing and Fred SternDocument40 pagesNumerical Methods in Computational Fluid Dynamics (CFD) : Maysam Mousaviraad, Tao Xing and Fred SternmohanNo ratings yet
- Numerical Methods in Computational Fluid Dynamics (CFD)Document40 pagesNumerical Methods in Computational Fluid Dynamics (CFD)Le QuangNo ratings yet
- Lecture2 PDFDocument25 pagesLecture2 PDFEdgar HuancaNo ratings yet
- 1 NonlinearDocument104 pages1 Nonlinear張育安No ratings yet
- Discretization of EquationDocument14 pagesDiscretization of Equationsandyengineer13No ratings yet
- CH Lecture 6Document55 pagesCH Lecture 6Sohail SakhaniNo ratings yet
- All 2014Document494 pagesAll 2014Dr. Hayder Al-Salihi Al-SalihiNo ratings yet
- CFD Numerical 2007 IntermediateDocument40 pagesCFD Numerical 2007 Intermediatehlkatk100% (1)
- PeriodicityDocument57 pagesPeriodicitytanmay sharmaNo ratings yet
- Numerical Experimentation: GoalsDocument3 pagesNumerical Experimentation: GoalsSNaveenMathewNo ratings yet
- HMT Lecture 3 - Two-Dimensional Steady State ConductionDocument7 pagesHMT Lecture 3 - Two-Dimensional Steady State ConductiontsegayNo ratings yet
- 01 CS316 IntroductionDocument45 pages01 CS316 IntroductionAbdelrhman SowilamNo ratings yet
- Week1 Chapter 1-3 IntroductionDocument56 pagesWeek1 Chapter 1-3 IntroductionIVAN CHRISTIANNo ratings yet
- Discretization MethodsDocument32 pagesDiscretization MethodsHari SimhaNo ratings yet
- Numerical Methods in Computational Fluid Dynamics (CFD) : Tao Xing and Fred SternDocument40 pagesNumerical Methods in Computational Fluid Dynamics (CFD) : Tao Xing and Fred Sternpraveensathya.indiaNo ratings yet
- Non-Derivative Optimization: Mathematics or Heuristics?Document52 pagesNon-Derivative Optimization: Mathematics or Heuristics?Edwin Quispe CondoriNo ratings yet
- 0 PreliminariesDocument23 pages0 Preliminaries張育安No ratings yet
- Chapter 1Document15 pagesChapter 1fabriyanaNo ratings yet
- Neural Networks & Fuzzy Logic (BITS F312) : 1. Introduction (Prof. Bhanot)Document22 pagesNeural Networks & Fuzzy Logic (BITS F312) : 1. Introduction (Prof. Bhanot)Bhavin JainNo ratings yet
- CFD Lecture 0Document27 pagesCFD Lecture 0Don Poul JoseNo ratings yet
- Lecture5&6 CFD Course Discretization-21Sept2001Document89 pagesLecture5&6 CFD Course Discretization-21Sept2001vibhor28100% (3)
- Numerical Methods in Computational Fluid Dynamics CFDDocument40 pagesNumerical Methods in Computational Fluid Dynamics CFDsivakkumar14No ratings yet
- Mesh Free Methods: Nico Van Der AaDocument32 pagesMesh Free Methods: Nico Van Der AaBenjamin HQNo ratings yet
- Monte Carlo Simulations in Physics: Kari Rummukainen Department of Physical Sciences, University of OuluDocument34 pagesMonte Carlo Simulations in Physics: Kari Rummukainen Department of Physical Sciences, University of OuluRodrigoCastellanoNo ratings yet
- Handbook - Montecarlo Simulations in Physics PDFDocument34 pagesHandbook - Montecarlo Simulations in Physics PDFAndhika Anggara CgNo ratings yet
- Class1 ScIIDocument43 pagesClass1 ScIIHarshit KarwalNo ratings yet
- 3.4 - Some Aspects of DiscretizationDocument38 pages3.4 - Some Aspects of DiscretizationAnonymous ARMtmNKLNo ratings yet
- Monte Carlo Simulations in Physics: Kari Rummukainen Department of Physical Sciences, University of OuluDocument34 pagesMonte Carlo Simulations in Physics: Kari Rummukainen Department of Physical Sciences, University of OuluLuca Selva CampobassoNo ratings yet
- W9 - Linear Equation-20191108040143Document70 pagesW9 - Linear Equation-20191108040143muhamad luqmanNo ratings yet
- 0 PreliminariesDocument27 pages0 Preliminariesyvonnetsai0306No ratings yet
- Wainwright Microsoft Slides2Document67 pagesWainwright Microsoft Slides2Cyrus RayNo ratings yet
- Team 4 PresentationDocument30 pagesTeam 4 Presentationteo leoNo ratings yet
- 02-1 Linear Algebraic EquationsDocument29 pages02-1 Linear Algebraic EquationsAseel OtoumNo ratings yet
- JRF in Computer and Communication SciencesDocument34 pagesJRF in Computer and Communication SciencesprabhakargoliNo ratings yet
- Ca529 Cns-Module 3Document51 pagesCa529 Cns-Module 3Rishav SinghNo ratings yet
- Slides Intro2OptDocument50 pagesSlides Intro2OptMann NarangNo ratings yet
- Ch7. OptimizationDocument17 pagesCh7. Optimizationmsalam2No ratings yet
- ResearchCards 18sept2020 PDFDocument172 pagesResearchCards 18sept2020 PDFГлигор СтавровNo ratings yet
- Random Number GenerationDocument42 pagesRandom Number GenerationsanniaNo ratings yet
- Wireless Communications LecturesDocument271 pagesWireless Communications Lectureskostas_ntougias5453100% (1)
- Line Drawing: CMPT 361 Introduction To Computer Graphics Torsten MöllerDocument31 pagesLine Drawing: CMPT 361 Introduction To Computer Graphics Torsten MöllerSadam GebiNo ratings yet
- Notes HQDocument96 pagesNotes HQPiyush AgrahariNo ratings yet
- Random Number GenerationDocument43 pagesRandom Number GenerationAnsh GanatraNo ratings yet
- Linear Programming: (For The Encyclopedia of Microcomputers)Document8 pagesLinear Programming: (For The Encyclopedia of Microcomputers)jspinsightNo ratings yet
- ECE 530 - Analysis Techniques For Large-Scale Electrical SystemsDocument31 pagesECE 530 - Analysis Techniques For Large-Scale Electrical SystemscdkNo ratings yet
- Lecture1 6 PDFDocument30 pagesLecture1 6 PDFColinNo ratings yet
- Lecture Week 2B 2018 PDFDocument87 pagesLecture Week 2B 2018 PDFalfalfa manNo ratings yet
- 01 Numerical Methods - IntroDocument20 pages01 Numerical Methods - IntroAseel OtoumNo ratings yet
- Numerical Solution of The Governing Equations (The Finite Volume Method)Document70 pagesNumerical Solution of The Governing Equations (The Finite Volume Method)Tuong BuiNo ratings yet
- Trigo TableDocument4 pagesTrigo TabletyornNo ratings yet
- Numerical Methods: Dr. Charisma ChoudhuryDocument14 pagesNumerical Methods: Dr. Charisma Choudhurysam9jNo ratings yet
- Constraint ProgrammingDocument31 pagesConstraint ProgrammingSusanoo12No ratings yet
- Zero Lecture MTH401Document25 pagesZero Lecture MTH401Shaik Abdul SalamNo ratings yet
- Multi-Level Adaptive SolutionsDocument58 pagesMulti-Level Adaptive SolutionscubewormNo ratings yet
- Inverse Problem Theory: Methods for Data Fitting and Model Parameter EstimationFrom EverandInverse Problem Theory: Methods for Data Fitting and Model Parameter EstimationNo ratings yet
- Primer PasoDocument2 pagesPrimer PasoFelipe GuerraNo ratings yet
- Deber 1Document9 pagesDeber 1Felipe GuerraNo ratings yet
- Mathematical Analysis - Exercises: Felipe Guerra April 23, 2018Document2 pagesMathematical Analysis - Exercises: Felipe Guerra April 23, 2018Felipe GuerraNo ratings yet
- Mathematical Analysis - Exercises: Felipe Guerra November 29, 2017Document5 pagesMathematical Analysis - Exercises: Felipe Guerra November 29, 2017Felipe GuerraNo ratings yet
- Mathematical Analysis - Exercises: Felipe Guerra November 29, 2017Document5 pagesMathematical Analysis - Exercises: Felipe Guerra November 29, 2017Felipe GuerraNo ratings yet
- Seminar ReportDocument23 pagesSeminar ReportMamta MishraNo ratings yet
- Short CV RJCDocument3 pagesShort CV RJCShivani KhannaNo ratings yet
- 2 - Basic Theories of Gender PsychologyDocument20 pages2 - Basic Theories of Gender Psychologyergün ErgünNo ratings yet
- As Sci 10 SLG Week 5 Quarter IiDocument6 pagesAs Sci 10 SLG Week 5 Quarter IiDarwin BondocNo ratings yet
- MR Right - Case Study Test - Summer 2018Document7 pagesMR Right - Case Study Test - Summer 2018jadenNo ratings yet
- 7 Ways To Better Your LetteringDocument5 pages7 Ways To Better Your LetteringLuciana Freire0% (2)
- Esia Report: Sustainable Akkar Wind Farm, LebanonDocument738 pagesEsia Report: Sustainable Akkar Wind Farm, LebanonAnderson Martins Dos SantosNo ratings yet
- Thermoports K-KB Series Operating InstructionsDocument5 pagesThermoports K-KB Series Operating InstructionsMuhammad Ali HaiderNo ratings yet
- Fractional DistillationDocument7 pagesFractional DistillationInspector Chulbul PandayNo ratings yet
- Fault Detection System of Underground Power Line (1) (1) (AutoRecovered)Document4 pagesFault Detection System of Underground Power Line (1) (1) (AutoRecovered)Surya RtzNo ratings yet
- Directorate General of Drug Administration: SL Name of The Pharmaceutical Address Location Licence No. Present StatusDocument2 pagesDirectorate General of Drug Administration: SL Name of The Pharmaceutical Address Location Licence No. Present StatusAnamika SahaNo ratings yet
- Mark Scheme (Results) : Summer 2017Document22 pagesMark Scheme (Results) : Summer 2017Khalid AhmedNo ratings yet
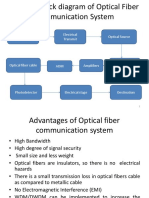
- Source of Information Electrical Transmit Optical SourceDocument37 pagesSource of Information Electrical Transmit Optical SourcesubashNo ratings yet
- TRANS Finals NSTPDocument6 pagesTRANS Finals NSTPStephanieNo ratings yet
- Ma Education-4th-Engl2115-16-16 PDFDocument39 pagesMa Education-4th-Engl2115-16-16 PDFSameera ZahidNo ratings yet
- ICT Basic Types of ComputerDocument7 pagesICT Basic Types of ComputerMomina B KhanNo ratings yet
- Positive Mental AttitudeDocument83 pagesPositive Mental AttitudemuetanianNo ratings yet
- MasterRoc MP 368 TIXDocument3 pagesMasterRoc MP 368 TIXZimplemente Kimizita Dominguez CampoNo ratings yet
- PSE PG Structure ModifedDocument61 pagesPSE PG Structure ModifedAnkit YadavNo ratings yet
- Deep Well Submersible Pump (Hydraulic Calculations)Document2 pagesDeep Well Submersible Pump (Hydraulic Calculations)Imran Aziz100% (2)
- Dokumen PDFDocument4 pagesDokumen PDFI Komang Agus Adi Merta 07No ratings yet
- A Study On Five International Scientists: Micro Project ReportDocument18 pagesA Study On Five International Scientists: Micro Project ReportAishwarya MohanNo ratings yet
- Do Global Economic and Political Integrations Bring More Harm To The Philippines and The Filipinos or Not? Articulate Your StanceDocument3 pagesDo Global Economic and Political Integrations Bring More Harm To The Philippines and The Filipinos or Not? Articulate Your StancenonononowayNo ratings yet
- Top Renewable Energy Trends of 2018: Madeleine HoweDocument4 pagesTop Renewable Energy Trends of 2018: Madeleine HowedubryNo ratings yet
- 5 Fit Tolerances-Problem SolvingDocument10 pages5 Fit Tolerances-Problem SolvingSHIVANANDA DALEINo ratings yet
- Descriptive TextDocument3 pagesDescriptive TextcaaaaaNo ratings yet
- ASTM Manual Series, MNL 52 An IntroductionDocument73 pagesASTM Manual Series, MNL 52 An IntroductionPabel Gil Ramirez CamonesNo ratings yet
- Sika Anchorfix®-3030: Product Data SheetDocument5 pagesSika Anchorfix®-3030: Product Data SheetReab SimanthNo ratings yet
- Throwing Garbage in The SeaDocument3 pagesThrowing Garbage in The SeaZaramagne CaliboNo ratings yet
- Eng Pcdmis 2022.1 CMM ManualDocument453 pagesEng Pcdmis 2022.1 CMM ManualRahulNo ratings yet