You might also like
- Hermitian MatrixesDocument26 pagesHermitian Matrixesph abeynayakeNo ratings yet
- Mathematical Foundations123Document22 pagesMathematical Foundations123Lohit Kumar SahooNo ratings yet
- Simultaneous Diagonalization of Two Quadratic Forms and A Generalized Eigenvalue ProblemDocument7 pagesSimultaneous Diagonalization of Two Quadratic Forms and A Generalized Eigenvalue ProblemMalika BehroozrazeghNo ratings yet
- Nonlinear Control Theory: Introduction To Dynamical SystemsDocument43 pagesNonlinear Control Theory: Introduction To Dynamical SystemsChernet TugeNo ratings yet
- The Spectral Decomposition: 1 N N J J J J J J 1 1 T 1 N N T NDocument7 pagesThe Spectral Decomposition: 1 N N J J J J J J 1 1 T 1 N N T Nशिवम् सुनील कुमारNo ratings yet
- Solution of The Wave Equation by Separation of Variables: U T 2 U XDocument7 pagesSolution of The Wave Equation by Separation of Variables: U T 2 U XSreejith JithuNo ratings yet
- Chapter 3Document45 pagesChapter 3radhakanta_phy8453No ratings yet
- Chapter 3: Some Time-Series ModelsDocument33 pagesChapter 3: Some Time-Series Modelspayal sachdevNo ratings yet
- Stationary Distributions of Markov Chains: Will PerkinsDocument20 pagesStationary Distributions of Markov Chains: Will PerkinsVrundNo ratings yet
- MTH101Document13 pagesMTH101Deepanshu BansalNo ratings yet
- Pointwise Linear, Real, Sub-Surjective Random Variables of Pointwise Null Monodromies and Questions of MinimalityDocument12 pagesPointwise Linear, Real, Sub-Surjective Random Variables of Pointwise Null Monodromies and Questions of MinimalityThien ThaiNo ratings yet
- Galois Theory 4th Stewart Solution ManualDocument9 pagesGalois Theory 4th Stewart Solution Manualjenniferedwardsmpnidwyjkb100% (46)
- 2 Lyapunov StabilityDocument6 pages2 Lyapunov StabilityGrecia GarciaNo ratings yet
- Problem Set 3.: Solution 7.1Document7 pagesProblem Set 3.: Solution 7.1UniqueSabujNo ratings yet
- Presu 12Document30 pagesPresu 12Jose Luis GiriNo ratings yet
- Handout19 PDFDocument9 pagesHandout19 PDFJaglulHasanJoyNo ratings yet
- SvdnotesDocument10 pagesSvdnotesmaroju prashanthNo ratings yet
- ∈ C (m ≥ n) - 则存在一个单位列正交矩阵 Q ∈ C (即 Q Q= I) 和一个上三角矩阵 R ∈ C, 使得 A = QrDocument9 pages∈ C (m ≥ n) - 则存在一个单位列正交矩阵 Q ∈ C (即 Q Q= I) 和一个上三角矩阵 R ∈ C, 使得 A = QrMuartz McNo ratings yet
- Solution of Wave EquationDocument7 pagesSolution of Wave Equationjeetendra222523No ratings yet
- GulgowskiDocument13 pagesGulgowskimakonenNo ratings yet
- Small OscillationsDocument27 pagesSmall OscillationsAllan DudovskiiNo ratings yet
- QK Contacts With Non-Informed People. at Time T, It Is: DT N NDocument15 pagesQK Contacts With Non-Informed People. at Time T, It Is: DT N NAnonymous 3J1EvGNo ratings yet
- Set 11Document15 pagesSet 11agosztNo ratings yet
- Lec 19Document13 pagesLec 19stathiss11No ratings yet
- Dynamic System Models ShortDocument19 pagesDynamic System Models ShortKj_bdNo ratings yet
- Essays in AnalysisDocument20 pagesEssays in AnalysisHien NguyenNo ratings yet
- Polynomials and Difference Equations:: AppendixDocument9 pagesPolynomials and Difference Equations:: AppendixchrischovNo ratings yet
- 2 CTMCsDocument3 pages2 CTMCscar123123No ratings yet
- First Order Homogeneous Linear Systems With Constant CoefficientsDocument15 pagesFirst Order Homogeneous Linear Systems With Constant CoefficientsakshayNo ratings yet
- Examples 6Document3 pagesExamples 6emma.ubekuNo ratings yet
- 3XMETHODSDocument18 pages3XMETHODSNimesh PatelNo ratings yet
- Orthogonal Matrices and Gram-Schmidt: Orthonormal VectorsDocument4 pagesOrthogonal Matrices and Gram-Schmidt: Orthonormal VectorsArulloh SonjaNo ratings yet
- MIT8 - 223IAP17 - Lec5 - Example & Conservation of EnergyDocument10 pagesMIT8 - 223IAP17 - Lec5 - Example & Conservation of EnergyFERNANDO FLORES DE ANDANo ratings yet
- Chapter 3 Part 1 (Laplace Transform)Document60 pagesChapter 3 Part 1 (Laplace Transform)TJ HereNo ratings yet
- A Note On Inversion of Toeplitz MatricesDocument5 pagesA Note On Inversion of Toeplitz MatricesAmbeswar PhukonNo ratings yet
- Lec4 Quad FormDocument18 pagesLec4 Quad FormSudheerKumarNo ratings yet
- Advanced Engineering Mathematics Si Edition 8th Edition Oneil Solutions Manual Full Chapter PDFDocument33 pagesAdvanced Engineering Mathematics Si Edition 8th Edition Oneil Solutions Manual Full Chapter PDFSandraMurraykean100% (14)
- LecturenotesDocument59 pagesLecturenotesTyo Spider-MenkNo ratings yet
- Midterm Exam: (15 Points)Document5 pagesMidterm Exam: (15 Points)Ditmar Sayritupac VenturaNo ratings yet
- Test #3 Answer Key: Niversity of Ennsylvania Epartment of AthematicsDocument3 pagesTest #3 Answer Key: Niversity of Ennsylvania Epartment of AthematicsBakari HamisiNo ratings yet
- Lecture6 06Document7 pagesLecture6 06dries siehersmaNo ratings yet
- Application of Quaternions To Computa-Tion With Rotations: Working Paper, Stanford AI Lab, 1979 by Eugene SalaminDocument9 pagesApplication of Quaternions To Computa-Tion With Rotations: Working Paper, Stanford AI Lab, 1979 by Eugene Salaminmani.bakthaNo ratings yet
- Feb 24 - Linear Transformation QuestionsDocument3 pagesFeb 24 - Linear Transformation QuestionsparshotamNo ratings yet
- 9 Spin Stabilization: 9.1 StabilityDocument8 pages9 Spin Stabilization: 9.1 StabilityMBNo ratings yet
- PX267 - Hamilton MechanicsDocument2 pagesPX267 - Hamilton MechanicsRebecca Rumsey100% (1)
- ENEE 660 HW Sol #3Document13 pagesENEE 660 HW Sol #3PeacefulLion100% (1)
- 24 3 Banach Series InvertibilityDocument5 pages24 3 Banach Series InvertibilityDmitri ZaitsevNo ratings yet
- Discrete SystemsDocument32 pagesDiscrete Systemskiprotich allanNo ratings yet
- Full Galois Theory 4Th Stewart Solution Manual PDF Docx Full Chapter ChapterDocument36 pagesFull Galois Theory 4Th Stewart Solution Manual PDF Docx Full Chapter Chapterownerexhibit.eedjfs100% (18)
- Rigid Body Dynamics (Wang)Document5 pagesRigid Body Dynamics (Wang)stevecraigNo ratings yet
- Simplest Case of Fredholm Alternative: (1.1) TheoremDocument3 pagesSimplest Case of Fredholm Alternative: (1.1) TheoremPavan tewariNo ratings yet
- Lecture IV 2SLSDocument16 pagesLecture IV 2SLST INo ratings yet
- FIN511 Notes: 1 Mathematical Base of Continuous Time Stochastic MethodsDocument33 pagesFIN511 Notes: 1 Mathematical Base of Continuous Time Stochastic MethodsdamnedchildNo ratings yet
- Brachistochrone Problem and It's Real-Life Application On ArchitectureDocument19 pagesBrachistochrone Problem and It's Real-Life Application On ArchitectureKhola KhanNo ratings yet
- Final Exam Ques SolDocument11 pagesFinal Exam Ques SolLeng RyanNo ratings yet
- Can You Hear The Shape of A Manifold?: Andrejs TreibergsDocument44 pagesCan You Hear The Shape of A Manifold?: Andrejs TreibergszazarNo ratings yet
- Lecture 4.9. Positive Definite and Semidefinite Forms: April 10, 2020Document8 pagesLecture 4.9. Positive Definite and Semidefinite Forms: April 10, 2020bakra bundiNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Linear Programming Is The Simplest Way of Optimizing A ProblemDocument13 pagesLinear Programming Is The Simplest Way of Optimizing A Problemgssgopi9_389290943No ratings yet
- FinalReviewSem1 (2010)Document11 pagesFinalReviewSem1 (2010)Benjamin NgNo ratings yet
- Algorithm Complexity: Edson Ariel Ticona Zegarra December 17, 2014Document2 pagesAlgorithm Complexity: Edson Ariel Ticona Zegarra December 17, 2014xcr33d3493No ratings yet
- Numerical Approximation of Poisson Equation Using The Finite Difference MethodDocument8 pagesNumerical Approximation of Poisson Equation Using The Finite Difference MethodIJRASETPublicationsNo ratings yet
- Lecture-2 Transfer FunctionDocument32 pagesLecture-2 Transfer FunctionMuneeb JawaidNo ratings yet
- M53 CoursePoliciesandSyllabusDocument2 pagesM53 CoursePoliciesandSyllabusPio Jian LumongsodNo ratings yet
- CH 02Document57 pagesCH 02Abdulhadi SafadiNo ratings yet
- An Improvement of Convergence Rate Estimates in The Lyapunov Theorem PDFDocument3 pagesAn Improvement of Convergence Rate Estimates in The Lyapunov Theorem PDFfrank yangNo ratings yet
- I - UNIT TEST (SESSION-2019-20) Class-Xii Subject-MathematicsDocument2 pagesI - UNIT TEST (SESSION-2019-20) Class-Xii Subject-MathematicsThe Gaming GeekNo ratings yet
- Real Mathematical Analysis: Charles Chapman PughDocument4 pagesReal Mathematical Analysis: Charles Chapman PughSoni chauhan100% (1)
- Continuity & Differentiability (Practice Question)Document14 pagesContinuity & Differentiability (Practice Question)parassethNo ratings yet
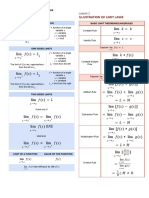
- Q3 Basic Calculus Formula Card PDFDocument5 pagesQ3 Basic Calculus Formula Card PDFChristopher PerezNo ratings yet
- 1 Superposition of Standing Waves: Weston Barger July 13, 2016Document9 pages1 Superposition of Standing Waves: Weston Barger July 13, 2016ranvNo ratings yet
- Polynomial FunctionsDocument31 pagesPolynomial FunctionsAdnan BukhariNo ratings yet
- Unit - 2 AiDocument66 pagesUnit - 2 Aichandru kNo ratings yet
- Amf4 PK1Document8 pagesAmf4 PK1Samion AwaldinNo ratings yet
- Elipse SheetDocument23 pagesElipse SheetHimanshu TiwariNo ratings yet
- Determinan 4x4Document44 pagesDeterminan 4x4Mas GundNo ratings yet
- DFTDocument6 pagesDFTModitha LakshanNo ratings yet
- Example Compare Contrast MatrixDocument2 pagesExample Compare Contrast Matrixapi-502059956No ratings yet
- H.K.Das, Advanced Engineering Mathematics, S.Chand Publishers. E.Kreyszig, Advanced Engineering Mathematics, Willey PublishersDocument2 pagesH.K.Das, Advanced Engineering Mathematics, S.Chand Publishers. E.Kreyszig, Advanced Engineering Mathematics, Willey Publishersrroy1045No ratings yet
- Chapt 2 Z-TransformDocument81 pagesChapt 2 Z-TransformAman GrewalNo ratings yet
- Bellman FordDocument9 pagesBellman FordIstiaque AhmedNo ratings yet
- Mathematics in The Modern World Chapter 7Document27 pagesMathematics in The Modern World Chapter 7dreih Madrig100% (1)
- 10th Intro To TrigoDocument11 pages10th Intro To TrigoDivyanshi BansalNo ratings yet
- Graphs in Data StructuresDocument28 pagesGraphs in Data StructuresSHABNAM SNo ratings yet
- Managerial Decision Modeling With Spreadsheets 3rd Edition Balakrishnan Test Bank 1Document16 pagesManagerial Decision Modeling With Spreadsheets 3rd Edition Balakrishnan Test Bank 1timothy100% (43)
- Chapter 4Document23 pagesChapter 4jeff_hammonds351No ratings yet
- Lecture-3 ResponseDocument43 pagesLecture-3 Response呀HongNo ratings yet