You might also like
- Transient-Response Analysis and Steady-State Error Analysis 1. DefinitionsDocument4 pagesTransient-Response Analysis and Steady-State Error Analysis 1. Definitionsprica_adrianNo ratings yet
- Solutions TD Auto 3A 2023Document24 pagesSolutions TD Auto 3A 2023KARKAR NORANo ratings yet
- Bab 2 Transformasi Laplace: Mathematician and Astronomer Pierre-Simon LaplaceDocument31 pagesBab 2 Transformasi Laplace: Mathematician and Astronomer Pierre-Simon LaplaceRizqi Cahyo M PutraNo ratings yet
- 5-1 Introduction: Chapter 5 The Laplace TransformDocument25 pages5-1 Introduction: Chapter 5 The Laplace TransformpatangkaNo ratings yet
- 5-1 Introduction: Chapter 5 The Laplace TransformDocument25 pages5-1 Introduction: Chapter 5 The Laplace TransformranaqasimranaNo ratings yet
- Control Chapter 3 8EDocument60 pagesControl Chapter 3 8EE24089046林雯琪No ratings yet
- 1 Control Bachelor MathDocument31 pages1 Control Bachelor MathJamal awdiNo ratings yet
- Mert Ozbayram Math219 Assignment Week11 Due 08/23/2016 at 11:59pm EESTDocument2 pagesMert Ozbayram Math219 Assignment Week11 Due 08/23/2016 at 11:59pm EESTOrkun AkyolNo ratings yet
- Mathematical Modelling VER5Document110 pagesMathematical Modelling VER5HarshaNo ratings yet
- Time Response of Systems: 10.1 Some Standard Time ResponsesDocument8 pagesTime Response of Systems: 10.1 Some Standard Time ResponseskiranNo ratings yet
- State Space Description of A Dynamic System: 1. Linear CaseDocument8 pagesState Space Description of A Dynamic System: 1. Linear CaseAnonymous N2c1CpNo ratings yet
- Signal and System Signal and SystemDocument94 pagesSignal and System Signal and SystempitayutNo ratings yet
- CS Lecture 4Document29 pagesCS Lecture 4sadaf asmaNo ratings yet
- Lecture 2+modeling+ +Document60 pagesLecture 2+modeling+ +呀HongNo ratings yet
- Laplace Transform: Dr. Ajay Singh RaghuvanshiDocument66 pagesLaplace Transform: Dr. Ajay Singh RaghuvanshiBhaskarNo ratings yet
- Chapter 5 - Dynamic Behavior of First-Order and Second-Order ProcessesDocument44 pagesChapter 5 - Dynamic Behavior of First-Order and Second-Order ProcessesFakhrulShahrilEzanieNo ratings yet
- Dayalbagh Educational Institute (Deemed University), Agra: Experiment 2 TitleDocument8 pagesDayalbagh Educational Institute (Deemed University), Agra: Experiment 2 TitleAkizuki TakaoNo ratings yet
- Control 4Document5 pagesControl 4Asfand HaroonNo ratings yet
- Transient-Analysis Question Practice PDFDocument99 pagesTransient-Analysis Question Practice PDFShivMeenaNo ratings yet
- 4.3 PT1: First Order Lag (Single Capacity) : 4.3.1 General PropertiesDocument18 pages4.3 PT1: First Order Lag (Single Capacity) : 4.3.1 General PropertiesAngelaNo ratings yet
- WWW - Studymaterialz.in: Signal and System Important 30 MCQ PDF With SolutionDocument71 pagesWWW - Studymaterialz.in: Signal and System Important 30 MCQ PDF With SolutionYash Gopani100% (1)
- 1 - Transfer Functions LinearizationDocument13 pages1 - Transfer Functions Linearizationedo marNo ratings yet
- Chapter 4.1 Response Ist Order SystemsDocument35 pagesChapter 4.1 Response Ist Order SystemsShah AdnanNo ratings yet
- Signals Systems PDFDocument93 pagesSignals Systems PDFrohithNo ratings yet
- Lecture Slides 03 - Dynamic Response of Linear SystemsDocument21 pagesLecture Slides 03 - Dynamic Response of Linear SystemsSakshi TiwariNo ratings yet
- FluidmechanicsDocument62 pagesFluidmechanicsNadiaa AdjoviNo ratings yet
- Dynamic Characteristics of Measurement SystemDocument43 pagesDynamic Characteristics of Measurement SystemMedo Hamed0% (1)
- Solution Manual For Signals and Systems Using Matlab 3rd by ChaparroDocument38 pagesSolution Manual For Signals and Systems Using Matlab 3rd by Chaparroandrotomyboationv7fsf100% (21)
- 2 2.transfer FunctionDocument60 pages2 2.transfer FunctionEngenheiro TeslandoNo ratings yet
- EMS507 Lecture 2 - Transfer Function and Block DiagramsDocument20 pagesEMS507 Lecture 2 - Transfer Function and Block Diagrams124ll124No ratings yet
- The Zero-State Response Sums of InputsDocument4 pagesThe Zero-State Response Sums of Inputsbaruaeee100% (1)
- 2021 - w3 Math FoundationDocument24 pages2021 - w3 Math FoundationM. AnggaNo ratings yet
- Chapter56 Laplace&TFDocument106 pagesChapter56 Laplace&TFfebri setyawanNo ratings yet
- Signal and System Important 30 MCQ PDF With SolutionDocument10 pagesSignal and System Important 30 MCQ PDF With SolutionSantosh KumarNo ratings yet
- Signal and System Important 30 MCQ PDF With SolutionDocument10 pagesSignal and System Important 30 MCQ PDF With SolutionRamesh MallaiNo ratings yet
- Lect 3 PDFDocument34 pagesLect 3 PDFحاتم غيدان خلفNo ratings yet
- 1-7 Ss SolDocument15 pages1-7 Ss SolBUSHRA BATOOLNo ratings yet
- TIME DOMAIN ANALYSIS Part-1Document67 pagesTIME DOMAIN ANALYSIS Part-1Mr. Amit Kumar SinghNo ratings yet
- Set6 PDFDocument8 pagesSet6 PDFNITISH KUMARNo ratings yet
- Formula Sheet FinalDocument3 pagesFormula Sheet FinalNawwafNo ratings yet
- Delta Function and So OnDocument20 pagesDelta Function and So OnLionel TopperNo ratings yet
- Kap1 PDFDocument12 pagesKap1 PDFwliuwNo ratings yet
- !!en2 Discontinuity Functions v05Document3 pages!!en2 Discontinuity Functions v05Marcela DobreNo ratings yet
- EE2023 Signals & Systems Notes 1Document19 pagesEE2023 Signals & Systems Notes 1FarwaNo ratings yet
- LTI System Analysis With The Laplace TransformDocument25 pagesLTI System Analysis With The Laplace TransformMuhammad Yani MunandarNo ratings yet
- ch03 UnlockedDocument50 pagesch03 Unlockede24112085No ratings yet
- Lecture 2Document19 pagesLecture 2miscellaneoususe01No ratings yet
- Formula SheetDocument4 pagesFormula Sheetgeyoxi5098No ratings yet
- Lecture 11Document24 pagesLecture 11malakaNo ratings yet
- Time Domain Analysis PDFDocument86 pagesTime Domain Analysis PDF20BEE056 NEHA INDORIYANo ratings yet
- DSP Using ARMDocument25 pagesDSP Using ARMVinitKharkarNo ratings yet
- Unit-I 23 - 12 - 14Document157 pagesUnit-I 23 - 12 - 14Anonymous JDXbBDBNo ratings yet
- Assignment - 3Document2 pagesAssignment - 3Gunda Venkata SaiNo ratings yet
- Transfer Functions and Frequency Response: Review Questions!Document47 pagesTransfer Functions and Frequency Response: Review Questions!Pavan Singh TomarNo ratings yet
- Control Systems: Review of Laplace TransformDocument14 pagesControl Systems: Review of Laplace Transformpiyush soniNo ratings yet
- N N N N Y: Signals & Systems Questions Set 01Document13 pagesN N N N Y: Signals & Systems Questions Set 01Sachin Singh NegiNo ratings yet
- Time Response Analysis of Control SystemsDocument5 pagesTime Response Analysis of Control SystemsAmyiel FloresNo ratings yet
- From Fourier Series To Fourier Transform To FFTDocument29 pagesFrom Fourier Series To Fourier Transform To FFTMuhammad Luthfi Al AkbarNo ratings yet
- Problem Set 2 SolutionDocument10 pagesProblem Set 2 SolutionAbec One-offNo ratings yet
- M.S Engineering (Aerospace) Application Form: For Office UseDocument4 pagesM.S Engineering (Aerospace) Application Form: For Office Useshashasha123No ratings yet
- Nursing Education Field TripDocument5 pagesNursing Education Field TripIshika Roy67% (3)
- JSA of Materila Handling ApproviedDocument2 pagesJSA of Materila Handling Approviedsakthi venkatNo ratings yet
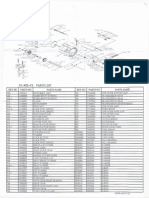
- Okuma CL302L Parts List & ManualDocument3 pagesOkuma CL302L Parts List & Manualcoolestkiwi100% (1)
- Basic English Grammar ChartDocument3 pagesBasic English Grammar Chartm1eme1mNo ratings yet
- Packing Lists AbroadDocument9 pagesPacking Lists AbroadAdit PinheiroNo ratings yet
- The Blender InterfaceDocument22 pagesThe Blender InterfaceacocancerNo ratings yet
- Package Suppdists': R Topics DocumentedDocument26 pagesPackage Suppdists': R Topics DocumentedHector Alejandro Cabezas CasanuevaNo ratings yet
- Gibbs VerBeek CorrespondenceDocument3 pagesGibbs VerBeek CorrespondenceWXMINo ratings yet
- PNAPDocument79 pagesPNAPYu chung yinNo ratings yet
- EN Paper-5Document11 pagesEN Paper-5isabellemdelmasNo ratings yet
- Agencies Engaged in Construction Inspection, Testing, or Special InspectionDocument10 pagesAgencies Engaged in Construction Inspection, Testing, or Special InspectionharryNo ratings yet
- Punch Fear in The Face Escape AverageDocument12 pagesPunch Fear in The Face Escape AverageRezaBachtiarNo ratings yet
- Coastal Boards Co Is A Merchandising Business The Account BalancesDocument1 pageCoastal Boards Co Is A Merchandising Business The Account BalancesFreelance WorkerNo ratings yet
- MGT-01 (14.03.23) - QPDocument19 pagesMGT-01 (14.03.23) - QPSrinivas VakaNo ratings yet
- Pink & Green Colorful Vintage Aesthetic Minimalist Manhwa Interior Decor Illustration Work From Home Basic PresentationDocument221 pagesPink & Green Colorful Vintage Aesthetic Minimalist Manhwa Interior Decor Illustration Work From Home Basic PresentationHứa Nguyệt VânNo ratings yet
- P22Document9 pagesP22Aastha JainNo ratings yet
- Lesson 12 FastenersDocument9 pagesLesson 12 FastenersEmerson John RoseteNo ratings yet
- Dual Shield 7100 Ultra: Typical Tensile PropertiesDocument3 pagesDual Shield 7100 Ultra: Typical Tensile PropertiesDino Paul Castro HidalgoNo ratings yet
- 1.2. Types of Bank: Dhruba Koirala National Law CollegeDocument38 pages1.2. Types of Bank: Dhruba Koirala National Law CollegeMadan ShresthaNo ratings yet
- Ten Questions Concerning Hybrid Computational Physical Mod - 2016 - Building andDocument10 pagesTen Questions Concerning Hybrid Computational Physical Mod - 2016 - Building andQU DAUPNo ratings yet
- Primax Solar Energy CatalogueDocument49 pagesPrimax Solar Energy CatalogueSalman Ali QureshiNo ratings yet
- Business Tax ReviewerDocument22 pagesBusiness Tax ReviewereysiNo ratings yet
- Case Analysis: The Kimpton ExperienceDocument1 pageCase Analysis: The Kimpton ExperienceMaricel Ann BaccayNo ratings yet
- Type Italian Characters - Online Italian KeyboardDocument3 pagesType Italian Characters - Online Italian KeyboardGabriel PereiraNo ratings yet
- Value For Money Analysis.5.10.12Document60 pagesValue For Money Analysis.5.10.12Jason SanchezNo ratings yet
- MarpleDocument10 pagesMarpleC.Auguste DupinNo ratings yet
- Social Studies Lesson Plan 3Document4 pagesSocial Studies Lesson Plan 3api-260708940No ratings yet
- Dissertation Conflit Israelo PalestinienDocument7 pagesDissertation Conflit Israelo PalestinienPaySomeoneToWriteAPaperForMeUK100% (2)
- Question Bank For MDocument22 pagesQuestion Bank For MchinnnababuNo ratings yet