You might also like
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Laplace Transform TableDocument2 pagesLaplace Transform TableSuksmatatya ParamestiNo ratings yet
- Laplace MatlabDocument21 pagesLaplace MatlabIrwan WahyudiNo ratings yet
- تحليلات 1 2 3Document27 pagesتحليلات 1 2 3توحد الأديانNo ratings yet
- Formulas LaplaceDocument1 pageFormulas LaplaceIvo GeceleNo ratings yet
- Laplace Transform 1Document5 pagesLaplace Transform 1ifiokNo ratings yet
- ECM2105 Laplace Transform GuideDocument18 pagesECM2105 Laplace Transform GuideEduardo FerreiraNo ratings yet
- 2 Unit 1-Laplace TransformDocument35 pages2 Unit 1-Laplace TransformRahul KumarNo ratings yet
- Page 1Document1 pagePage 1Yamith BarrancoNo ratings yet
- Laplace Transform Chapter 1 IntroductionDocument28 pagesLaplace Transform Chapter 1 IntroductionMohammed NabilNo ratings yet
- Formula Sheet FinalDocument3 pagesFormula Sheet FinalNawwafNo ratings yet
- Laplace Transform Applications in Various FieldsDocument47 pagesLaplace Transform Applications in Various Fieldsjucar fernandezNo ratings yet
- Sheet 1 Laplace Transform 20190914Document3 pagesSheet 1 Laplace Transform 20190914midotaher765No ratings yet
- Interconnect Delay Models: EE695K VLSI InterconnectDocument16 pagesInterconnect Delay Models: EE695K VLSI InterconnectSuyash SinghNo ratings yet
- Properties of Laplace Transform - I: Ang M.S 2012-8-14Document5 pagesProperties of Laplace Transform - I: Ang M.S 2012-8-14DineshNo ratings yet
- Ee602 LaplaceDocument76 pagesEe602 LaplaceRadhi MusaNo ratings yet
- Fourier Transform PropertiesDocument1 pageFourier Transform PropertiessightlesswarriorNo ratings yet
- Appendix I Laplace Transform Table Properties Function Laplace ValueDocument5 pagesAppendix I Laplace Transform Table Properties Function Laplace Valueravin kumarNo ratings yet
- Chapter 4.1 Response Ist Order SystemsDocument35 pagesChapter 4.1 Response Ist Order SystemsShah AdnanNo ratings yet
- Bab 2 Transformasi LaplaceDocument31 pagesBab 2 Transformasi LaplaceRizqi Cahyo M PutraNo ratings yet
- Convolution and system interconnectionsDocument5 pagesConvolution and system interconnectionsGeorge KaragiannidisNo ratings yet
- 4.1 Introduction To Angle ModulationDocument39 pages4.1 Introduction To Angle Modulation120200421003nNo ratings yet
- Attachment Laplace TransformDocument2 pagesAttachment Laplace Transformahmad hazimNo ratings yet
- Midterm Study ProblemDocument4 pagesMidterm Study ProblemTehe SaglamNo ratings yet
- Review ChapterDocument13 pagesReview ChaptermirosehNo ratings yet
- !!en2 Discontinuity Functions v05Document3 pages!!en2 Discontinuity Functions v05Marcela DobreNo ratings yet
- Laplace Transform TableDocument5 pagesLaplace Transform TableMahmut KILIÇNo ratings yet
- Control 4Document5 pagesControl 4Asfand HaroonNo ratings yet
- Laplace Transform: BIOE 4200Document23 pagesLaplace Transform: BIOE 4200vasu_koneti5124No ratings yet
- Formula Sheet Midterm 222Document2 pagesFormula Sheet Midterm 222NawwafNo ratings yet
- Control SystemDocument45 pagesControl SystemKelvin KongNo ratings yet
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocument29 pagesApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNo ratings yet
- Transform Calculus Module 2: Laplace Transform: Elementary PropertiesDocument9 pagesTransform Calculus Module 2: Laplace Transform: Elementary Propertiessatyagowri abbireddiNo ratings yet
- Fourier series (FS) : ∞ k jkω t k T −jkω tDocument4 pagesFourier series (FS) : ∞ k jkω t k T −jkω t1MV20EE016 BHUVAN PMNo ratings yet
- Taula LaplaceDocument1 pageTaula LaplaceLbshshw OjsjwNo ratings yet
- LksmssaplaceDocument43 pagesLksmssaplaceNakuNo ratings yet
- LaplaceDocument43 pagesLaplaceNakuNo ratings yet
- Exponential Distribution: Most Widely Used Probability Distribution in Reliability AssessmentDocument5 pagesExponential Distribution: Most Widely Used Probability Distribution in Reliability AssessmentKrishna Kumar AlagarNo ratings yet
- LAP11 (Dirac Delta Function)Document5 pagesLAP11 (Dirac Delta Function)mayarahmed12509No ratings yet
- Fourier series (FS) : ∞ k jkω t k T −jkω tDocument4 pagesFourier series (FS) : ∞ k jkω t k T −jkω tarashixNo ratings yet
- Input/output System ModelsDocument4 pagesInput/output System ModelsYassine DjillaliNo ratings yet
- Assignment 4 Alcisto Instrumentation and ControlDocument8 pagesAssignment 4 Alcisto Instrumentation and Controlmatt DonorNo ratings yet
- Laplace TransformDocument95 pagesLaplace Transformkac2872No ratings yet
- University of Hertfordshire Control Systems Formula SheetDocument12 pagesUniversity of Hertfordshire Control Systems Formula SheetEidren 02No ratings yet
- M475 c2 L7 EmulationDocument11 pagesM475 c2 L7 EmulationAli AlmakhmariNo ratings yet
- Tutorial 2: System Dynamics and Process StructuresDocument4 pagesTutorial 2: System Dynamics and Process StructuresggleichgesinntenNo ratings yet
- Math 2280 - Assignment 10: Dylan Zwick Spring 2014Document19 pagesMath 2280 - Assignment 10: Dylan Zwick Spring 2014Bree ElaineNo ratings yet
- 44 Probability ExerciseDocument3 pages44 Probability ExerciseLopez Shian ErvinNo ratings yet
- Laplace Transformation TableDocument1 pageLaplace Transformation TableDjNo ratings yet
- TablaDocument2 pagesTablanestorGNo ratings yet
- Ee202laplacetransform PDFDocument85 pagesEe202laplacetransform PDFFairusabdrNo ratings yet
- Formula Notes Control Systems Final 74 13 PDFDocument13 pagesFormula Notes Control Systems Final 74 13 PDFTed StinsonNo ratings yet
- ECE1004 Laplace Transform GuideDocument7 pagesECE1004 Laplace Transform GuideHARJAP DANDIWALNo ratings yet
- Handout 4: Course Notes Were Prepared by Dr. R.M.A.P. Rajatheva and Revised by Dr. Poompat SaengudomlertDocument7 pagesHandout 4: Course Notes Were Prepared by Dr. R.M.A.P. Rajatheva and Revised by Dr. Poompat SaengudomlertBryan YaranonNo ratings yet
- Tablica Laplasovih TransformacijaDocument1 pageTablica Laplasovih TransformacijaHexeresNo ratings yet
- Common transform pairs tableDocument6 pagesCommon transform pairs tableKakitani MusicNo ratings yet
- DT T T: Tabela de Transformadas de Laplace ObservaçãoDocument1 pageDT T T: Tabela de Transformadas de Laplace ObservaçãoRayranLimaNo ratings yet
- Chapter2 Lect3Document14 pagesChapter2 Lect3Olga Joy Labajo GerastaNo ratings yet
- Transformadas integrales y sus tablasDocument1 pageTransformadas integrales y sus tablasBenjaminSerranoNo ratings yet
- Tabla PDFDocument1 pageTabla PDFBenjaminSerranoNo ratings yet
- NZ7 Series Automatic Transfer Switching Equipment: Ambient TemperatureDocument11 pagesNZ7 Series Automatic Transfer Switching Equipment: Ambient Temperaturefrank115No ratings yet
- TB 02201001 eDocument98 pagesTB 02201001 eKush SharmaNo ratings yet
- G VD Transfer FunctionDocument7 pagesG VD Transfer FunctionSamuel JuradoNo ratings yet
- ARC JMK-Research June-2021Document6 pagesARC JMK-Research June-2021Karthik SengodanNo ratings yet
- 2151ULDocument2 pages2151ULAdel YassinNo ratings yet
- Classic 61⁄2′′ Woofer FeaturesDocument2 pagesClassic 61⁄2′′ Woofer FeaturesBob HwknsNo ratings yet
- 50 Watt Mono Amplifier TDA1514A Technical MrigankaDocument2 pages50 Watt Mono Amplifier TDA1514A Technical MrigankaNataly DavalosNo ratings yet
- 5 Toyota Camry HEV ERG PDFDocument29 pages5 Toyota Camry HEV ERG PDFTung NguyenNo ratings yet
- Stepping MotorsDocument7 pagesStepping MotorsTrần Thành ĐạtNo ratings yet
- Lab 6 ReportDocument27 pagesLab 6 ReportIzzat AzmanNo ratings yet
- Explanation LightningDocument6 pagesExplanation LightningJunaris Kjm II100% (1)
- Panel Builder PricelistDocument316 pagesPanel Builder Pricelistsaurabhrai85No ratings yet
- Nptel WeldingDocument236 pagesNptel WeldingNishankzattNo ratings yet
- Hydrogen Cooled GeneratorsDocument4 pagesHydrogen Cooled GeneratorsRigoberto UrrutiaNo ratings yet
- Dolphin 70e 75e Handheld Computers Accessory Catalog en PDFDocument8 pagesDolphin 70e 75e Handheld Computers Accessory Catalog en PDFYesica SantamariaNo ratings yet
- MarineDiesel VGT-series, Electrical Troubleshooting Manual (Ver 1.0)Document58 pagesMarineDiesel VGT-series, Electrical Troubleshooting Manual (Ver 1.0)poknik 1400No ratings yet
- VSX-523-K AV Receiver Service ManualDocument99 pagesVSX-523-K AV Receiver Service ManualMar DocdorNo ratings yet
- Physics ProjectDocument18 pagesPhysics Projectabinav rajaNo ratings yet
- Crown Xs500Document1 pageCrown Xs500Scott HartleyNo ratings yet
- LTA Street Lighting Guidelines - 05 Mar 17Document59 pagesLTA Street Lighting Guidelines - 05 Mar 17Siew Tong Chan100% (3)
- GE - 700-800T Advanced Service Manual - ASMDocument224 pagesGE - 700-800T Advanced Service Manual - ASMCleberson Silveira Clementino100% (4)
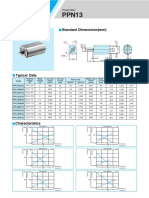
- мотор PPN-13KADocument1 pageмотор PPN-13KAServiceVNo ratings yet
- GH 1C 12LDocument2 pagesGH 1C 12LRoberto MendesNo ratings yet
- TLF Catalogue Ringmaster 135Document7 pagesTLF Catalogue Ringmaster 135Isaac VoonNo ratings yet
- W&C Sec 9 Issue 5Document200 pagesW&C Sec 9 Issue 5tvsameel7208No ratings yet
- Electric Utility Application and Reference GuideDocument12 pagesElectric Utility Application and Reference Guidepatitay036817No ratings yet
- Sunlord Wire Wound Chip Balun Transformer SpecsDocument3 pagesSunlord Wire Wound Chip Balun Transformer SpecskishordaNo ratings yet
- TO: All Dealers RE: Repair Parts For The FAR 2805 Series RadarsDocument7 pagesTO: All Dealers RE: Repair Parts For The FAR 2805 Series RadarsAnıl KahyaNo ratings yet
- Ecler Nuo4 Controller Service Manual PDFDocument50 pagesEcler Nuo4 Controller Service Manual PDFDJ JAM0% (1)
- Electronic Modular Control Panel II (EMCP II) For PEEC EnginesDocument9 pagesElectronic Modular Control Panel II (EMCP II) For PEEC Enginesfrezgi birhanuNo ratings yet