You might also like
- Ch15_Laplace Transforms IDocument45 pagesCh15_Laplace Transforms IdadsdNo ratings yet
- Fourier Transform PropertiesDocument1 pageFourier Transform PropertiessightlesswarriorNo ratings yet
- Process Dynamic and Control - IntroDocument156 pagesProcess Dynamic and Control - IntroNuzul RamadhaniNo ratings yet
- Formulas (EXAM)Document3 pagesFormulas (EXAM)Thanh Dat NguyenNo ratings yet
- Introduction To Laplace TransformsDocument32 pagesIntroduction To Laplace TransformsAd Man GeTigNo ratings yet
- Formula SheetDocument4 pagesFormula Sheetgeyoxi5098No ratings yet
- Laplace Transform: Presentation: He YangDocument14 pagesLaplace Transform: Presentation: He YangsaadkhalisNo ratings yet
- Signals and Systems Class 17Document23 pagesSignals and Systems Class 17wizarderbrNo ratings yet
- Formulas (QUIZ)Document2 pagesFormulas (QUIZ)Thanh Dat NguyenNo ratings yet
- MAT 241-Calculus 3 - Prof. Santilli Toughloves Chapter 13Document3 pagesMAT 241-Calculus 3 - Prof. Santilli Toughloves Chapter 13Gerardo Mendoza RicaudNo ratings yet
- MHS11 Z TransformDocument16 pagesMHS11 Z TransformHassan El-kholyNo ratings yet
- ENGG2310A (Fall 2018) : Problem 1-1Document11 pagesENGG2310A (Fall 2018) : Problem 1-1Tsz Wing YipNo ratings yet
- Laplace Transform Applications in Various FieldsDocument47 pagesLaplace Transform Applications in Various Fieldsjucar fernandezNo ratings yet
- Lecture 3 ModelingDocument28 pagesLecture 3 ModelingSai AnoopNo ratings yet
- Fourier Transform TableDocument8 pagesFourier Transform TableThe KingNo ratings yet
- Introduction to Laplace Transforms for Solving Differential EquationsDocument47 pagesIntroduction to Laplace Transforms for Solving Differential EquationsTalha MazharNo ratings yet
- Black-Scholes Formulas Sheet for Options PricingDocument3 pagesBlack-Scholes Formulas Sheet for Options PricingIvanNo ratings yet
- Midterm Study ProblemDocument4 pagesMidterm Study ProblemTehe SaglamNo ratings yet
- CS589-04 Digital Image Processing Filtering in Frequency DomainDocument123 pagesCS589-04 Digital Image Processing Filtering in Frequency DomainAshish PatelNo ratings yet
- Handout - 04 (CT)Document4 pagesHandout - 04 (CT)Mohian RahmanNo ratings yet
- 02 Chapter 02Document60 pages02 Chapter 02Get CubeloNo ratings yet
- State Space Modeling LectureDocument19 pagesState Space Modeling LectureAum4Eng HelpNo ratings yet
- L3: Linear, Time-Invariant (LTI) Systems and Linear DistortionDocument25 pagesL3: Linear, Time-Invariant (LTI) Systems and Linear DistortionHunter VerneNo ratings yet
- Fourier Series PresentationDocument81 pagesFourier Series PresentationRajithNimali100% (1)
- 1 Sine Integral: Some Special FunctionsDocument34 pages1 Sine Integral: Some Special FunctionsZubayer AhmedNo ratings yet
- Tabela LaplaceDocument1 pageTabela LaplaceThiago LiãoNo ratings yet
- 3.Fourier series _gibbs phenomenaDocument5 pages3.Fourier series _gibbs phenomenaSPECIFIED With SIMFLIFICATIONNo ratings yet
- Unit1 PDFDocument72 pagesUnit1 PDFRiddhijit ChattopadhyayNo ratings yet
- (Non-Periodic Signals) : Fourier TransformDocument33 pages(Non-Periodic Signals) : Fourier TransformPragya ChakshooNo ratings yet
- Laplace TransformsDocument7 pagesLaplace Transformsabhi2calmNo ratings yet
- Quiz 1: (T T) (T 2T) (T T) (T 2T)Document1 pageQuiz 1: (T T) (T 2T) (T T) (T 2T)BoilerhelproomNo ratings yet
- 10Â÷ Á ÁØÈ 050930 Ofdm (DR - Cho)Document54 pages10Â÷ Á ÁØÈ 050930 Ofdm (DR - Cho)Ngọc Hiếu DươngNo ratings yet
- Assignment 4 Alcisto Instrumentation and ControlDocument8 pagesAssignment 4 Alcisto Instrumentation and Controlmatt DonorNo ratings yet
- Laplace TransformsDocument8 pagesLaplace TransformsJonathan ChangNo ratings yet
- Fourier PDFDocument8 pagesFourier PDFNaeemo IraqiNo ratings yet
- Table of Fourier Transform PairsDocument8 pagesTable of Fourier Transform Pairsujjal deyNo ratings yet
- Fourier PDFDocument8 pagesFourier PDFNRMPNo ratings yet
- S&S L5Document77 pagesS&S L5Aalaa Hussein HamidNo ratings yet
- Laplace TransformationDocument48 pagesLaplace TransformationGail Nathalie LiraNo ratings yet
- 2 Deterministic Signal AnalysisDocument27 pages2 Deterministic Signal Analysistesfalem seyoumNo ratings yet
- Control 11 4 PDFDocument16 pagesControl 11 4 PDFMais SarayraNo ratings yet
- تحليلات 1 2 3Document27 pagesتحليلات 1 2 3توحد الأديانNo ratings yet
- Properties of The Laplace Transform: - ObjectivesDocument11 pagesProperties of The Laplace Transform: - ObjectivesBala Samuvel JosephNo ratings yet
- Laplace MatlabDocument21 pagesLaplace MatlabIrwan WahyudiNo ratings yet
- Continuous-Time Fourier Transform: Prof. Adnan KavakDocument14 pagesContinuous-Time Fourier Transform: Prof. Adnan Kavakhobi dunyamNo ratings yet
- An Atlas of Engineering Dynamic Systems, Models, and Transfer FunctionsDocument37 pagesAn Atlas of Engineering Dynamic Systems, Models, and Transfer Functionshazem ab2009No ratings yet
- Chapter2 Lect3Document14 pagesChapter2 Lect3Olga Joy Labajo GerastaNo ratings yet
- Page 1Document1 pagePage 1Yamith BarrancoNo ratings yet
- Lecture 10Document14 pagesLecture 10Totan PatraNo ratings yet
- Assignment#2Document2 pagesAssignment#2vaishnaviNo ratings yet
- Block Diagram and Transfer FunctionsDocument20 pagesBlock Diagram and Transfer FunctionsBatuhan Mutlugil 'Duman'No ratings yet
- 05 Convolution of CT and DTDocument63 pages05 Convolution of CT and DTBhaskarNo ratings yet
- System Time Response AnalysisDocument16 pagesSystem Time Response AnalysisAndrewAbdelmassiehNo ratings yet
- Signals and Systems (Practice Questions - Laplace Transform)Document26 pagesSignals and Systems (Practice Questions - Laplace Transform)madivala nagaraja0% (1)
- Computational Fluid Dynamics : February 28Document68 pagesComputational Fluid Dynamics : February 28Tatenda NyabadzaNo ratings yet
- Chap 3 ConvolutionDocument10 pagesChap 3 ConvolutionSolomon LemaNo ratings yet
- Chapter2 Lect3Document14 pagesChapter2 Lect3nctgayarangaNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Tables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesFrom EverandTables of Generalized Airy Functions for the Asymptotic Solution of the Differential Equation: Mathematical Tables SeriesNo ratings yet
- Two Port+NetworksDocument108 pagesTwo Port+NetworksCHAYANIN AKETANANUNNo ratings yet
- L1 FrequencyResponseDocument8 pagesL1 FrequencyResponseCHAYANIN AKETANANUNNo ratings yet
- Laplace Transform: Ñwskéwo%ÑñDocument5 pagesLaplace Transform: Ñwskéwo%ÑñCHAYANIN AKETANANUNNo ratings yet
- Magnetic Coupling CircuitDocument37 pagesMagnetic Coupling CircuitCHAYANIN AKETANANUNNo ratings yet
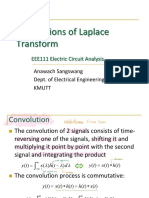
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocument29 pagesApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNNo ratings yet
- L3 FiltersDocument5 pagesL3 FiltersCHAYANIN AKETANANUNNo ratings yet
- L1 FrequencyResponseDocument8 pagesL1 FrequencyResponseCHAYANIN AKETANANUNNo ratings yet
- Magnetic Coupling CircuitDocument37 pagesMagnetic Coupling CircuitCHAYANIN AKETANANUNNo ratings yet
- Magnetic Coupling CircuitDocument37 pagesMagnetic Coupling CircuitCHAYANIN AKETANANUNNo ratings yet
- L1 FrequencyResponseDocument8 pagesL1 FrequencyResponseCHAYANIN AKETANANUNNo ratings yet
- L2 ResonanceDocument7 pagesL2 ResonanceCHAYANIN AKETANANUNNo ratings yet
- EEE 111 Electric Circuit Analysis 17 ..2559Document10 pagesEEE 111 Electric Circuit Analysis 17 ..2559CHAYANIN AKETANANUNNo ratings yet
- Fourier SeriesDocument103 pagesFourier SeriesCHAYANIN AKETANANUNNo ratings yet
- King Mon1 Kut's University of Technology Thonburi: 1'111 EEE 111 Electric Circuit Analysis 9.00-12.00Document15 pagesKing Mon1 Kut's University of Technology Thonburi: 1'111 EEE 111 Electric Circuit Analysis 9.00-12.00CHAYANIN AKETANANUNNo ratings yet
- CFA Level I Quick Sheet PDFDocument9 pagesCFA Level I Quick Sheet PDFGhulam Hassan100% (1)
- Mechanics Practice Papers 2Document13 pagesMechanics Practice Papers 2Sarvesh DubeyNo ratings yet
- NAPLAN 2011 Final Test Numeracy Year 7 CalculatorDocument13 pagesNAPLAN 2011 Final Test Numeracy Year 7 CalculatoraimanNo ratings yet
- Geometry Chapter 6 Conic Sections and Circles Review QuestionsDocument6 pagesGeometry Chapter 6 Conic Sections and Circles Review Questionscreative mughalsNo ratings yet
- Research Variables GuideDocument3 pagesResearch Variables GuideClaraNo ratings yet
- STATA Data SummariesDocument15 pagesSTATA Data SummariesjminyosoNo ratings yet
- KAUST ECE 242 Digital Communications and Coding Final ExamDocument4 pagesKAUST ECE 242 Digital Communications and Coding Final ExamYingquan LiNo ratings yet
- Topic3.2 3 LectureNotesDocument42 pagesTopic3.2 3 LectureNotesBenjamin LeungNo ratings yet
- Computational Mathematics and Physics of Fusion Reactors - Paul R. GarabedianDocument5 pagesComputational Mathematics and Physics of Fusion Reactors - Paul R. GarabediandougnovaesNo ratings yet
- STANDARD COSTING With GP VARIANCE ANALYSIS KEY ANSWERSDocument19 pagesSTANDARD COSTING With GP VARIANCE ANALYSIS KEY ANSWERSaziel caith florentinNo ratings yet
- Sampling Distribution and Point EstimatesDocument9 pagesSampling Distribution and Point EstimatesShiinNo ratings yet
- Flexible Tool for Probabilistic Seismic Hazard AssessmentDocument11 pagesFlexible Tool for Probabilistic Seismic Hazard AssessmentZens Irving Huamani RodriguezNo ratings yet
- The RSA AlgorithmDocument15 pagesThe RSA AlgorithmveenadivyakishNo ratings yet
- Scale Up Factors With An Industrial PerspectiveDocument14 pagesScale Up Factors With An Industrial PerspectiverajuNo ratings yet
- Mass Storage Systems Chapter SummaryDocument15 pagesMass Storage Systems Chapter Summaryneha91No ratings yet
- Physcis Hkcee PastpaperDocument34 pagesPhyscis Hkcee Pastpaperpetecostein2No ratings yet
- Boundary Value Problems For DifferentialDocument12 pagesBoundary Value Problems For DifferentialDahiru AbdurrahmanNo ratings yet
- Parallel Operation of Alternators FundamentalsDocument12 pagesParallel Operation of Alternators FundamentalsSharad ChouguleNo ratings yet
- Falling Ball Viscometer: Abhishek Suman Department of Energy Science and Engineering IIT BombayDocument12 pagesFalling Ball Viscometer: Abhishek Suman Department of Energy Science and Engineering IIT BombayPratham sehgalNo ratings yet
- UVM ShinyObjectDocument18 pagesUVM ShinyObjectMila CohenNo ratings yet
- Gauss SeidelDocument7 pagesGauss SeidelGunvir SinghNo ratings yet
- Final - Module 4 BDocument61 pagesFinal - Module 4 BJohn Emmanuel TulayNo ratings yet
- Taller II Corte 3Document4 pagesTaller II Corte 3Davidsantiago Murillo AvilaNo ratings yet
- Tutorial 20201030 (KBAT Question)Document3 pagesTutorial 20201030 (KBAT Question)jasonNo ratings yet
- Reflection WorksheetDocument2 pagesReflection WorksheetRaghad AbdallaNo ratings yet
- AGGREGATE SHAPE TEST RESULTSDocument9 pagesAGGREGATE SHAPE TEST RESULTSBeman EasyNo ratings yet
- D 5334 - 92 - Rduzmzqtukve PDFDocument8 pagesD 5334 - 92 - Rduzmzqtukve PDFchabibNo ratings yet
- Digital Logic Design Chapter - Iii Logic Gates: Lecturer: Yonas HaregotDocument12 pagesDigital Logic Design Chapter - Iii Logic Gates: Lecturer: Yonas HaregotdagmawiNo ratings yet
- Codes and CiphersDocument9 pagesCodes and CiphersMilk BrotherNo ratings yet