You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Solutions For HumphreysDocument11 pagesSolutions For HumphreysAnonymous fbQ9bdptdKNo ratings yet
- Complex Semisimple Lie Algebras (Serre)Document81 pagesComplex Semisimple Lie Algebras (Serre)Miguel Ángel Valencia BucioNo ratings yet
- (Lecture Notes) Ian Grojnowski - Introduction To Lie Algebras and Their RepresentationsDocument63 pages(Lecture Notes) Ian Grojnowski - Introduction To Lie Algebras and Their RepresentationsFVRNo ratings yet
- Classification Theory of Semi-Simple Algebraic Groups (I. Satake)Document158 pagesClassification Theory of Semi-Simple Algebraic Groups (I. Satake)babazormNo ratings yet
- Up3 FlatcrimpingDocument1 pageUp3 FlatcrimpingaysandeepNo ratings yet
- Up1 SwitchgearlugsDocument1 pageUp1 SwitchgearlugsaysandeepNo ratings yet
- Mulberry Develop4Document28 pagesMulberry Develop4aysandeepNo ratings yet
- Mulberry 4Document20 pagesMulberry 4aysandeepNo ratings yet
- Up2 ImproperlugsDocument1 pageUp2 ImproperlugsaysandeepNo ratings yet
- Up6 EarthingpipeDocument1 pageUp6 EarthingpipeaysandeepNo ratings yet
- EnergyEfficientOilFiredReheatingFurnace750Kg PDFDocument46 pagesEnergyEfficientOilFiredReheatingFurnace750Kg PDFaysandeepNo ratings yet
- Sericulturehistory Part2Document19 pagesSericulturehistory Part2aysandeepNo ratings yet
- Sericulture TechniqueDocument4 pagesSericulture Techniqueshaad788No ratings yet
- Note On Sericulture English Oct2018Document26 pagesNote On Sericulture English Oct2018aysandeepNo ratings yet
- Sericulturehistory Part1 PDFDocument4 pagesSericulturehistory Part1 PDFaysandeepNo ratings yet
- Rep 0903 IndiaSericultureDocument26 pagesRep 0903 IndiaSericultureVipin NayakNo ratings yet
- Historyofsericulture PDFDocument1 pageHistoryofsericulture PDFaysandeepNo ratings yet
- Information Bulletin 2019 (M.tech PHD) - 1Document16 pagesInformation Bulletin 2019 (M.tech PHD) - 1Alvin JosephNo ratings yet
- JD - Prog Lead - PowerBox EEDocument1 pageJD - Prog Lead - PowerBox EEaysandeepNo ratings yet
- Silk Board ActDocument92 pagesSilk Board ActaysandeepNo ratings yet
- Guidelines For Treatment of DengueDocument4 pagesGuidelines For Treatment of DengueegalivanNo ratings yet
- Memtech 2013Document53 pagesMemtech 2013aysandeepNo ratings yet
- TransformatoriDocument21 pagesTransformatoriantoniomkdNo ratings yet
- UG Curriculum 2018Document212 pagesUG Curriculum 2018Kalyan RamNo ratings yet
- d2h Recommended PacksDocument28 pagesd2h Recommended PacksChaitali Soni0% (1)
- Memtech 2013Document53 pagesMemtech 2013aysandeepNo ratings yet
- ShortlyDocument48 pagesShortlyaysandeepNo ratings yet
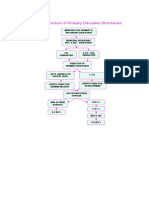
- Academic Structure of Primary Education DirectorateDocument1 pageAcademic Structure of Primary Education DirectorateaysandeepNo ratings yet
- Capacitor ProjectDocument13 pagesCapacitor ProjectTB80% (10)
- Capacitor ProjectDocument13 pagesCapacitor ProjectTB80% (10)
- Oil TrafoDocument27 pagesOil TrafoPin Santos100% (1)
- M.E. PedDocument41 pagesM.E. PedHOD EEENo ratings yet
- Transformer and Inductor Design Handbook Chapter 16Document13 pagesTransformer and Inductor Design Handbook Chapter 16aysandeepNo ratings yet
- Joachim Hilgert, Karl-Hermann Neeb Auth. Structure and Geometry of Lie GroupsDocument755 pagesJoachim Hilgert, Karl-Hermann Neeb Auth. Structure and Geometry of Lie Groups亮文祥100% (2)
- On Smarandache Rings IIDocument12 pagesOn Smarandache Rings IIMia AmaliaNo ratings yet
- Linear Algebraic Groups and Their Lie AlgebrasDocument81 pagesLinear Algebraic Groups and Their Lie AlgebrasDaniel MillerNo ratings yet
- Elie CartanDocument34 pagesElie CartandogasseduglyNo ratings yet
- Shapiro - Group Theory in PhysicsDocument206 pagesShapiro - Group Theory in PhysicsJosephNo ratings yet
- Onishchik, A. L. Lectures On Real Semisimple Lie Algebras and Ther RerpesentationsDocument96 pagesOnishchik, A. L. Lectures On Real Semisimple Lie Algebras and Ther RerpesentationsEmilio Salcedo MartínezNo ratings yet
- Infinitesimal GeneratorDocument18 pagesInfinitesimal GeneratorAdam CrystalpasNo ratings yet
- Bourbaki - Lie Groups and Lie Algebras (Chapters 1-3)Document481 pagesBourbaki - Lie Groups and Lie Algebras (Chapters 1-3)Zoe Rossi100% (1)
- DDD Star HomDocument5 pagesDDD Star HomDumitru D. DRAGHIANo ratings yet
- Introduction To Group Theory For PhysicistsDocument108 pagesIntroduction To Group Theory For PhysicistslunarcausticacNo ratings yet
- F4 (Mathematics)Document20 pagesF4 (Mathematics)Gaurav GargNo ratings yet
- Algebra Qualifying Exam SolutionsDocument21 pagesAlgebra Qualifying Exam SolutionsuppsNo ratings yet
- Non Abelian GradingsDocument20 pagesNon Abelian GradingsРоманNo ratings yet
- Killing FormDocument11 pagesKilling FormManuel2759No ratings yet
- On Global Representations of The Solutions of Linear Differential Equations As A Product of ExponentialsDocument8 pagesOn Global Representations of The Solutions of Linear Differential Equations As A Product of ExponentialsaaNo ratings yet
- Introduction To Quantum Groups by George Lusztig (Auth.)Document361 pagesIntroduction To Quantum Groups by George Lusztig (Auth.)Gillian SeedNo ratings yet
- Undergrad Thesis Lie AlgebrasDocument132 pagesUndergrad Thesis Lie AlgebrasTri NguyenNo ratings yet
- Symmetries, Lie Algebras and Representations: A Graduate Course For PhysicistsDocument7 pagesSymmetries, Lie Algebras and Representations: A Graduate Course For Physicistskdl1187056915No ratings yet
- Lecture 8 - Preservation of The Jordan Decomposition and Levi's TheoremDocument4 pagesLecture 8 - Preservation of The Jordan Decomposition and Levi's TheoremLayla SorkattiNo ratings yet
- Quantum Sugawara Operators in Type: Naihuan Jing, Ming Liu and Alexander MolevDocument23 pagesQuantum Sugawara Operators in Type: Naihuan Jing, Ming Liu and Alexander MolevsdvsberNo ratings yet
- Artin-Wedderburn Theorem: ConsequenceDocument2 pagesArtin-Wedderburn Theorem: Consequenceranjit sahaNo ratings yet
- Greatest Mathematicians PDFDocument67 pagesGreatest Mathematicians PDFNarasimma Pallava DudesimNo ratings yet
- Algebra 9: Artinian Rings and IdempotentsDocument5 pagesAlgebra 9: Artinian Rings and IdempotentsGertaNo ratings yet
- Journal of Algebra: Allan BereleDocument14 pagesJournal of Algebra: Allan BereleLuis FuentesNo ratings yet
- Lie Algebras ScriptDocument274 pagesLie Algebras ScriptJustNo ratings yet
- The Solution To A Generalized Toda Lattice and Representation TheoryDocument144 pagesThe Solution To A Generalized Toda Lattice and Representation TheoryPuig123No ratings yet