You might also like
- SPECTRUM SB 30 50 SR-2 (TK53087-2-MM Rev 0, 01-07)Document219 pagesSPECTRUM SB 30 50 SR-2 (TK53087-2-MM Rev 0, 01-07)felix318975% (8)
- Load FlowDocument5 pagesLoad FlowReshab SahooNo ratings yet
- Module 1 - Maintaining and Repairing Audio Products and SystemDocument52 pagesModule 1 - Maintaining and Repairing Audio Products and SystemAko Lang Poh70% (20)
- AC TheoryDocument10 pagesAC TheoryshrnbolonneNo ratings yet
- EE2092!2!2011 Coupled Circuits Dependant SourcesDocument100 pagesEE2092!2!2011 Coupled Circuits Dependant SourcesshrnbolonneNo ratings yet
- Unit-3 PsocDocument23 pagesUnit-3 PsocDESI BRAHMNNo ratings yet
- Current Limiting Reactors (CLR) : Technical Overview and Measurement ProceduresDocument2 pagesCurrent Limiting Reactors (CLR) : Technical Overview and Measurement ProceduresEsteban MuñozNo ratings yet
- Brushless DC MotorsDocument7 pagesBrushless DC MotorsRonald LugwireNo ratings yet
- Network Analysis &transmission Lines PDFDocument183 pagesNetwork Analysis &transmission Lines PDFmlsawhney2996No ratings yet
- NPTEL 2012 Network Analysis and SynthesisDocument148 pagesNPTEL 2012 Network Analysis and SynthesisMahesh SinghNo ratings yet
- EE2092!1!2011 FundamentalsDocument84 pagesEE2092!1!2011 FundamentalsshrnbolonneNo ratings yet
- External ContentDocument374 pagesExternal Contentmarris09No ratings yet
- FE Technologies: PLC BasisDocument49 pagesFE Technologies: PLC BasisAutomation EngineerNo ratings yet
- Technical App Notes For LINK SPW Speed Programmed WinderDocument50 pagesTechnical App Notes For LINK SPW Speed Programmed WinderPham LongNo ratings yet
- DC Machines: 6.1 What Does One Look Like?Document7 pagesDC Machines: 6.1 What Does One Look Like?phoenix226No ratings yet
- Powwer Systems Lab List of ExperimentsDocument8 pagesPowwer Systems Lab List of ExperimentsAneesh AbhiNo ratings yet
- Hybrid Model Built From IEEE Transmission and Distribution Systems and Dynamic Parameters of Power Plant Equipment For The IEEE 39 Bus Transmission SystemDocument7 pagesHybrid Model Built From IEEE Transmission and Distribution Systems and Dynamic Parameters of Power Plant Equipment For The IEEE 39 Bus Transmission SystempowereeutaNo ratings yet
- D4x50401 PDFDocument262 pagesD4x50401 PDFqaisarharisNo ratings yet
- Load Estimation MethodsDocument4 pagesLoad Estimation Methodskaliman2010No ratings yet
- Power System Operation and ControlDocument28 pagesPower System Operation and ControlDebasish ChoudhuryNo ratings yet
- Synchronous MotorDocument4 pagesSynchronous MotorLiviu DeaconuNo ratings yet
- MDG 33 Part 1 of 2Document62 pagesMDG 33 Part 1 of 2mosesNo ratings yet
- Steady-State Stability Limit Studies Using Matlab SimulationDocument12 pagesSteady-State Stability Limit Studies Using Matlab SimulationPius OdabaNo ratings yet
- AC Lines SVS CompensationDocument8 pagesAC Lines SVS CompensationSagar ThakerNo ratings yet
- Finite Element 2D Model For Healthy State Operation of The Squirrel Cage Induction MotorDocument65 pagesFinite Element 2D Model For Healthy State Operation of The Squirrel Cage Induction MotorTusharNo ratings yet
- Svcet: Sri Vidya College of Engg and Tech Course Material Unit IDocument36 pagesSvcet: Sri Vidya College of Engg and Tech Course Material Unit IGokul ChandrasekaranNo ratings yet
- DNT 354 - Control Principle: Steady-State AnalysisDocument25 pagesDNT 354 - Control Principle: Steady-State AnalysisNiranjan BeheraNo ratings yet
- Evaluation OF Protective Relays: Prepared by Gopala Krishna Palepu Ade/Mrt (Protection)Document13 pagesEvaluation OF Protective Relays: Prepared by Gopala Krishna Palepu Ade/Mrt (Protection)bpchimeraNo ratings yet
- Improvement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodDocument5 pagesImprovement of Voltage Profile Through The Optimal Placement of FACTS Using L-Index MethodRavishankar KankaleNo ratings yet
- Flux Mag 53 enDocument18 pagesFlux Mag 53 enЛадо КиладзеNo ratings yet
- Flux Analysis of Electromagnetics DevicesDocument12 pagesFlux Analysis of Electromagnetics DevicesSilviu IlNo ratings yet
- Unit IV Ac Machines TamilDocument25 pagesUnit IV Ac Machines TamilDeivathin adimaikalNo ratings yet
- Lumped Element Rat Race CouplerDocument6 pagesLumped Element Rat Race Couplerbongoloid100% (1)
- PLC Counters... Timers Vikas M SampathDocument57 pagesPLC Counters... Timers Vikas M SampathVikas M SampathNo ratings yet
- MelsecNet Gateway 287eDocument2 pagesMelsecNet Gateway 287eAym BrNo ratings yet
- SINAMICS S120 PN at S7-300400 DOCU V1d0 enDocument67 pagesSINAMICS S120 PN at S7-300400 DOCU V1d0 enAbez FiveNo ratings yet
- Report Transient Analysis2Document4 pagesReport Transient Analysis2Diego F RodríguezNo ratings yet
- Electro-Thermal Analysis of An Induction MotorDocument5 pagesElectro-Thermal Analysis of An Induction MotorS Bharadwaj Reddy100% (1)
- Limit Parameter Setting PSS2A-NOTY PDFDocument7 pagesLimit Parameter Setting PSS2A-NOTY PDFxuanthamdhqnNo ratings yet
- Machines II ManualsDocument37 pagesMachines II ManualsAtharv ParanjpeNo ratings yet
- Load Flow AnalysisDocument12 pagesLoad Flow AnalysisHendra Dwi RamadhanNo ratings yet
- Automation of Coal Gasifier: Programmable Logic ControllerDocument40 pagesAutomation of Coal Gasifier: Programmable Logic Controllervinoddeswal057No ratings yet
- IEEE 34 Bus Intermittent Sources PDFDocument8 pagesIEEE 34 Bus Intermittent Sources PDFKancherla SameeraNo ratings yet
- Steady State Transient Analysis For 2x25kvDocument9 pagesSteady State Transient Analysis For 2x25kvcdevikarNo ratings yet
- Continuous Newton's Method For Power Flow AnalysisDocument8 pagesContinuous Newton's Method For Power Flow AnalysisChuchita PlatanoNo ratings yet
- Electric Machinery Fundamentals Fourth EDocument26 pagesElectric Machinery Fundamentals Fourth EZeeshan RafiqNo ratings yet
- To Perform SIL and PIL Testing On Fast D PDFDocument4 pagesTo Perform SIL and PIL Testing On Fast D PDFgil lerNo ratings yet
- Chap5 TL Operation v2Document35 pagesChap5 TL Operation v2Alamgir KhanNo ratings yet
- Mitsubishi Programmable Controllers Melsec-A/Qna Series Transition GuideDocument36 pagesMitsubishi Programmable Controllers Melsec-A/Qna Series Transition GuideRicardo SilvaNo ratings yet
- Participation Factor CalculationsDocument6 pagesParticipation Factor CalculationsMohammed MushtahaNo ratings yet
- Regulatory Compliance and Generator ControlDocument59 pagesRegulatory Compliance and Generator ControlsulemankhalidNo ratings yet
- البحثDocument88 pagesالبحثWoldemariam WorkuNo ratings yet
- 87t ConnectionDocument20 pages87t Connectionraul_bsuNo ratings yet
- Commissioning and Maintenance Testing of Multifunction Digital RelaysDocument10 pagesCommissioning and Maintenance Testing of Multifunction Digital RelaysASHOK KUMAR MUWALNo ratings yet
- MVA Method Load Flow CalculationDocument5 pagesMVA Method Load Flow CalculationdskymaximusNo ratings yet
- Power Factor Definition For A ThreeDocument11 pagesPower Factor Definition For A ThreeMasroor Mahmud BrelviNo ratings yet
- AC Machines Lab Manual PDFDocument91 pagesAC Machines Lab Manual PDFറിജിൽ വി ആർ100% (2)
- Dcmachine Unit 3Document104 pagesDcmachine Unit 3yohannes tesfahaunNo ratings yet
- DC GeneratorsDocument33 pagesDC Generatorsdallisrinivas14No ratings yet
- Chapter 4 - DC MachineDocument82 pagesChapter 4 - DC Machinepsksiva13No ratings yet
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- Nature of Indian EconomyDocument20 pagesNature of Indian EconomysignjpcoeNo ratings yet
- Land Reforms & Agriculture - 1st - ChapterDocument18 pagesLand Reforms & Agriculture - 1st - Chaptersignjpcoe100% (1)
- MA8353Document15 pagesMA8353signjpcoeNo ratings yet
- Ee8391 - Electromagnetic Theory: Unit 1-Introduction Two MarksDocument43 pagesEe8391 - Electromagnetic Theory: Unit 1-Introduction Two Markssignjpcoe0% (1)
- Ee8004 Modern Power Converters SyllabusDocument2 pagesEe8004 Modern Power Converters SyllabussignjpcoeNo ratings yet
- Ee8004 Modern Power Converters SyllabusDocument2 pagesEe8004 Modern Power Converters SyllabussignjpcoeNo ratings yet
- Unit 5 Single Phase Induction Motors and Special MachinesDocument1 pageUnit 5 Single Phase Induction Motors and Special MachinessignjpcoeNo ratings yet
- Ee8004 Modern Power Converters SyllabusDocument2 pagesEe8004 Modern Power Converters SyllabussignjpcoeNo ratings yet
- Ee8004 Modern Power Converters SyllabusDocument2 pagesEe8004 Modern Power Converters SyllabussignjpcoeNo ratings yet
- Energy From Sunlight: Further Steps Towards Artificial PhotosynthesisDocument1 pageEnergy From Sunlight: Further Steps Towards Artificial PhotosynthesissignjpcoeNo ratings yet
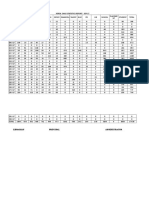
- Xerox Daily Statistics Report - Sep-17 Date Mech Civil ECE CSC EEE S&H Office Examcell Talent B.Ed PD LIB School Student Total Placeme NTDocument2 pagesXerox Daily Statistics Report - Sep-17 Date Mech Civil ECE CSC EEE S&H Office Examcell Talent B.Ed PD LIB School Student Total Placeme NTsignjpcoeNo ratings yet
- Brics: A Group Signature Scheme Based On An RSA-VariantDocument21 pagesBrics: A Group Signature Scheme Based On An RSA-VariantsignjpcoeNo ratings yet
- By K. Vijay Kumar Assistant Professor Dept. of ECEDocument31 pagesBy K. Vijay Kumar Assistant Professor Dept. of ECEsignjpcoeNo ratings yet
- National Board of AccreditationDocument8 pagesNational Board of Accreditationkaushal1977No ratings yet
- Flaktwoods SilencersDocument14 pagesFlaktwoods SilencersBenjamín AlainNo ratings yet
- VK3021 Quick Response Pendent Sprinkler K5.6 (80.6) : 1. Product IdentificationDocument19 pagesVK3021 Quick Response Pendent Sprinkler K5.6 (80.6) : 1. Product Identificationwika mepNo ratings yet
- Lecture 03Document21 pagesLecture 03Riju ChatterjeeNo ratings yet
- Ipc04 0395Document6 pagesIpc04 0395toddflyNo ratings yet
- ACI 301 - New Business - Whats Next - WilsonDocument33 pagesACI 301 - New Business - Whats Next - Wilsoneros100% (1)
- Confined Space - Permit To WorkDocument5 pagesConfined Space - Permit To WorkNgel EvnsNo ratings yet
- PLSQLDocument12 pagesPLSQLNataraju Gaddamadugu100% (1)
- Research Issues and Challenges in Wireless Networks: An OverviewDocument2 pagesResearch Issues and Challenges in Wireless Networks: An OverviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Manufacturing Process Data Management: IPC 175X Schema Version 2.0Document36 pagesManufacturing Process Data Management: IPC 175X Schema Version 2.0Vitalii SkrypnykNo ratings yet
- CISCO ASA Site To Site Ipsec VPN PDFDocument36 pagesCISCO ASA Site To Site Ipsec VPN PDFKA OniNo ratings yet
- Analysis of Fatigue Life in Two Weld Class Systems: Master Thesis in Solid MechanicsDocument296 pagesAnalysis of Fatigue Life in Two Weld Class Systems: Master Thesis in Solid Mechanicsgoedel1000No ratings yet
- Datasheet ECM 3508 Interface 4pgv1 A80401 PressDocument4 pagesDatasheet ECM 3508 Interface 4pgv1 A80401 Presslgreilly4No ratings yet
- ERP Case Analysis Worksheet 035Document4 pagesERP Case Analysis Worksheet 035Gaurish Natekar0% (1)
- MA VD4-40kA (EN) N 647654011-ManualDocument68 pagesMA VD4-40kA (EN) N 647654011-Manualdorin serbanNo ratings yet
- Is 3594 Fire Safety of Industrial Buildings General-Storage Ware HouseDocument11 pagesIs 3594 Fire Safety of Industrial Buildings General-Storage Ware HouseRamakrishna AgumbeNo ratings yet
- 1 PTBarsBrochure-Oct2015Document6 pages1 PTBarsBrochure-Oct2015Dong-Yong KimNo ratings yet
- Service & Parts Manual 2060 NewDocument94 pagesService & Parts Manual 2060 NewJose Lopez RuizNo ratings yet
- Archicad Training Series Vol.4Document267 pagesArchicad Training Series Vol.4Mihai SchiopuNo ratings yet
- 06K027005-061019-Rural Road Technical Specification CompleteDocument168 pages06K027005-061019-Rural Road Technical Specification CompleteAnyam TilneyNo ratings yet
- Kingston - Main Building ContractDocument278 pagesKingston - Main Building Contractpony loverNo ratings yet
- BDocument36 pagesBsaswattNo ratings yet
- Sailor - 6140 - MiniCMaritime - Thrane and ThraneDocument2 pagesSailor - 6140 - MiniCMaritime - Thrane and ThraneedgarwelchNo ratings yet
- Sunell IP TrainingDocument34 pagesSunell IP TrainingVictor BitarNo ratings yet
- 105 - NTPC CRF A 006Document1 page105 - NTPC CRF A 006Andreja GjureskiNo ratings yet
- Girder TrussDocument0 pagesGirder Truss74747474No ratings yet
- CCNA Practice Certification Exam# 2Document16 pagesCCNA Practice Certification Exam# 2luigi_ionescuNo ratings yet
- Technical Topics: Starting Large Motors From An Onan Engine-Generator SetDocument24 pagesTechnical Topics: Starting Large Motors From An Onan Engine-Generator SetPhilomine Calvin100% (1)