You might also like
- Da42 Pilots HandbookDocument64 pagesDa42 Pilots HandbookIvan KovalevNo ratings yet
- A320 AMM ch11Document636 pagesA320 AMM ch11Larry Bogues0% (1)
- 787 and A350Document5 pages787 and A350Adil SultanNo ratings yet
- 9.all, More Electric Aircraft Engine & Airframe Systems Implementation, Bedek Aviation Group, Aircraft Programs Division, Israel Aerospace Industries, IsraelDocument48 pages9.all, More Electric Aircraft Engine & Airframe Systems Implementation, Bedek Aviation Group, Aircraft Programs Division, Israel Aerospace Industries, Israelfinock100% (1)
- Lecture 5 - Distance Measuring DMEDocument12 pagesLecture 5 - Distance Measuring DMEzuliana100% (3)
- ICAO Protocol Questions ANS - 179 PQsDocument59 pagesICAO Protocol Questions ANS - 179 PQscbourguig100% (2)
- Design and Performance Analysis of Small Scale Horizontal Axis Wind TurbineDocument96 pagesDesign and Performance Analysis of Small Scale Horizontal Axis Wind TurbineArul PrakashNo ratings yet
- Fortran 90 95 Manual PDFDocument67 pagesFortran 90 95 Manual PDFsayyadmannanNo ratings yet
- Design and Optimisation of a Water Vortex Hydropower PlantDocument1 pageDesign and Optimisation of a Water Vortex Hydropower PlantJeff Barnard50% (2)
- The E-Fan All Electrical Aircraft Demonstrator and Its IndustrializationDocument6 pagesThe E-Fan All Electrical Aircraft Demonstrator and Its IndustrializationsjNo ratings yet
- NASA Turbo - and Hybrid-Electrified Aircraft Propulsion Concepts For Commercial TransportDocument8 pagesNASA Turbo - and Hybrid-Electrified Aircraft Propulsion Concepts For Commercial Transportmcdllv levozz lmdnapNo ratings yet
- Reducing Cost of Electric VTOL with Stopped Rotor and Tilt Rotor ConfigsDocument25 pagesReducing Cost of Electric VTOL with Stopped Rotor and Tilt Rotor Configspp NovoNo ratings yet
- Aerospace: Aerodynamic Design Optimization and Analysis of Ducted Fan Blades in Dep UavsDocument13 pagesAerospace: Aerodynamic Design Optimization and Analysis of Ducted Fan Blades in Dep UavsSơn Vũ TháiNo ratings yet
- Revisado - EnG Performance Analysis of An Electrically Asssted Propulsion SystemDocument13 pagesRevisado - EnG Performance Analysis of An Electrically Asssted Propulsion SystemjuanNo ratings yet
- Turboelectric Propulsion in Commercial AvaitionDocument18 pagesTurboelectric Propulsion in Commercial AvaitionjuanNo ratings yet
- NASA Electrified Aircraft Propulsion EffortsDocument11 pagesNASA Electrified Aircraft Propulsion Effortsmcdllv levozz lmdnapNo ratings yet
- MetodologiaEHAvsEMADocument17 pagesMetodologiaEHAvsEMAFabián AcevedoNo ratings yet
- Propulsão ElétricaDocument14 pagesPropulsão ElétricaSergioNo ratings yet
- Aerospace: Configuration Study of Electric Helicopters For Urban Air MobilityDocument19 pagesAerospace: Configuration Study of Electric Helicopters For Urban Air MobilityONo ratings yet
- AIAA2003 6732 Blended Wing BodyDocument12 pagesAIAA2003 6732 Blended Wing BodyccoyureNo ratings yet
- Aerospace 10 00064 v2Document20 pagesAerospace 10 00064 v2syed shahim HaiderNo ratings yet
- Aerospace Science and Technology: Joseph A. Schetz, Serhat Hosder, Vance Dippold III, Jessica WalkerDocument10 pagesAerospace Science and Technology: Joseph A. Schetz, Serhat Hosder, Vance Dippold III, Jessica WalkerEsteban ValenciaNo ratings yet
- 2018EATS Review of DEP Hyun D. 6.2018 4998Document21 pages2018EATS Review of DEP Hyun D. 6.2018 4998IsamarMM01No ratings yet
- Design and Development of A 200-kW Turbo-Electric Distributed Propulsion Testbed - 2017Document16 pagesDesign and Development of A 200-kW Turbo-Electric Distributed Propulsion Testbed - 2017Michael DuNo ratings yet
- Next Generation More-Electric Aircraft: A Potential Application For HTS SuperconductorsDocument14 pagesNext Generation More-Electric Aircraft: A Potential Application For HTS Superconductorsطه حسن شاكر محمودNo ratings yet
- Applied Sciences: Feasibility of A Helium Closed-Cycle Gas Turbine For UAV PropulsionDocument18 pagesApplied Sciences: Feasibility of A Helium Closed-Cycle Gas Turbine For UAV PropulsionTabog SkiNo ratings yet
- A Holistic System Approach For Short Range Passenger Aircraft With Cryogenic Propulsion SystemDocument15 pagesA Holistic System Approach For Short Range Passenger Aircraft With Cryogenic Propulsion SystemАндрей ПятыгинNo ratings yet
- Beyond The: More Electric AircraftDocument6 pagesBeyond The: More Electric AircraftJeevan KalraNo ratings yet
- Development of A Turbo Electric Distribution SysteDocument20 pagesDevelopment of A Turbo Electric Distribution SysteAna Maria LaraNo ratings yet
- The Method of Quadrant Based AlgorithmicDocument26 pagesThe Method of Quadrant Based AlgorithmicLe KangNo ratings yet
- Preliminary Design of A Joined Wing Hale Uav: ArticleDocument11 pagesPreliminary Design of A Joined Wing Hale Uav: ArticleNourhan FathyNo ratings yet
- Matecconf Easn2019 03009 PDFDocument8 pagesMatecconf Easn2019 03009 PDFsiddhartha2862No ratings yet
- Electric Propulsion and Comparison To Gas Turbine EnginesDocument14 pagesElectric Propulsion and Comparison To Gas Turbine EngineskeanuNo ratings yet
- Multi-Element Airfoil Configurations For Wind TurbDocument14 pagesMulti-Element Airfoil Configurations For Wind TurbMahmoud MoussaNo ratings yet
- State of Art On Energy Management Strategy For Hybrid-Powered Unmanned Aerial VehicleDocument16 pagesState of Art On Energy Management Strategy For Hybrid-Powered Unmanned Aerial VehiclecareerNo ratings yet
- Design, Development, and Initial Testing of A Computationally-Intensive, Long-Endurance Solar-Powered Unmanned AircraftDocument18 pagesDesign, Development, and Initial Testing of A Computationally-Intensive, Long-Endurance Solar-Powered Unmanned Aircraft이재국No ratings yet
- Aerospace: Aeroelastic Stability Analysis of Electric Aircraft Wings With Distributed Electric PropulsorsDocument12 pagesAerospace: Aeroelastic Stability Analysis of Electric Aircraft Wings With Distributed Electric PropulsorsJeison GarzonNo ratings yet
- Further Development of The NASA X-57 Maxwell Mission Planning Tool For Mods II, III, and IVDocument14 pagesFurther Development of The NASA X-57 Maxwell Mission Planning Tool For Mods II, III, and IVaravinth.iitmNo ratings yet
- Towards Higher Aerodynamic Efficiency of Propeller Driven Aircraft With Distributed PropulsionDocument15 pagesTowards Higher Aerodynamic Efficiency of Propeller Driven Aircraft With Distributed PropulsionwharNo ratings yet
- Moving Toward More-Electric Aircraft: Egysp2@nottingham - Ac.ukDocument4 pagesMoving Toward More-Electric Aircraft: Egysp2@nottingham - Ac.ukStan PNo ratings yet
- Improving The Environmental Impact of Civil Aircraft by Fuel Cell TechnologyDocument11 pagesImproving The Environmental Impact of Civil Aircraft by Fuel Cell TechnologyOmid PilotNo ratings yet
- FBW AfcsDocument16 pagesFBW AfcsKarad KaradiasNo ratings yet
- 2016 - An Integrated Approach To The Preliminary Weight SizingDocument16 pages2016 - An Integrated Approach To The Preliminary Weight Sizingahmad.yasser123456No ratings yet
- Energy Efficiency For Unmanned Aerial Vehicles: 2011 10th International Conference On Machine Learning and ApplicationsDocument5 pagesEnergy Efficiency For Unmanned Aerial Vehicles: 2011 10th International Conference On Machine Learning and ApplicationsAdib PriatamaNo ratings yet
- Impact of Electric Taxiing On Hybrid-Electric Aircraft SizingDocument10 pagesImpact of Electric Taxiing On Hybrid-Electric Aircraft SizingWilliam Jaldin CorralesNo ratings yet
- Comparison of Technical Features Between ADocument6 pagesComparison of Technical Features Between AFrisco TejNo ratings yet
- Overview of Electric Motor Technologies Used For More Electric Aircraft (MEA)Document9 pagesOverview of Electric Motor Technologies Used For More Electric Aircraft (MEA)Yasir AbbasNo ratings yet
- Commercial Aircraft Propulsion Energy Electric PropulsionDocument21 pagesCommercial Aircraft Propulsion Energy Electric PropulsionAnonymous vytw3sDNo ratings yet
- Zhang 2017Document8 pagesZhang 2017Qidiw Qidiw QidiwNo ratings yet
- A Study On Flywheel Energy Recovery From Aircraft BrakesDocument5 pagesA Study On Flywheel Energy Recovery From Aircraft BrakesRaniero FalzonNo ratings yet
- EDFPROPDocument25 pagesEDFPROPSidi Moulaye SidneNo ratings yet
- OverviewDocument10 pagesOverviewRobério Lourenço do NascimentoNo ratings yet
- Review Article Perspectives and Development of Electrical Systems in More Electric AircraftDocument14 pagesReview Article Perspectives and Development of Electrical Systems in More Electric AircraftcareerNo ratings yet
- Lukasik Full-Electric, HybridDocument6 pagesLukasik Full-Electric, Hybridwisienka-99No ratings yet
- Subsystem Design and Integration For The More Electric AircraftDocument8 pagesSubsystem Design and Integration For The More Electric AircraftewiontkoNo ratings yet
- 2Document16 pages2Balaji KNo ratings yet
- Operation and Performance Evaluation of Novel Electric-Wheel-Driven Hybrid-Electric Propulsion Systems On Standard Short Range Passenger AirplanesDocument17 pagesOperation and Performance Evaluation of Novel Electric-Wheel-Driven Hybrid-Electric Propulsion Systems On Standard Short Range Passenger AirplanesMiguel Angel AguirreNo ratings yet
- 1 s2.0 S1270963820310944 MainDocument10 pages1 s2.0 S1270963820310944 MainpRoBoTRoGe OPNo ratings yet
- Current Technologies and Challenges of Applying Fuel Cell Hybrid PropulsionDocument22 pagesCurrent Technologies and Challenges of Applying Fuel Cell Hybrid PropulsionTomislav RosuljNo ratings yet
- Energy Management of Aircraft Electrical Systems - State of The Art and Further DirectionsDocument7 pagesEnergy Management of Aircraft Electrical Systems - State of The Art and Further DirectionsRamandeep SinghNo ratings yet
- Extracting Energy from Atmospheric TurbulenceDocument9 pagesExtracting Energy from Atmospheric TurbulenceDimitris JohnNo ratings yet
- Power Management of SUASDocument11 pagesPower Management of SUASosamagillaniNo ratings yet
- Aerospace: Evaluation and Comparison of Hybrid Wing VTOL UAV With Four Different Electric Propulsion SystemsDocument14 pagesAerospace: Evaluation and Comparison of Hybrid Wing VTOL UAV With Four Different Electric Propulsion SystemsSabyasachi SahaNo ratings yet
- Technology Challenges in Small UAV Development: NASA Langley Research Center, Hampton, Virginia, 23681Document5 pagesTechnology Challenges in Small UAV Development: NASA Langley Research Center, Hampton, Virginia, 23681Hermes®No ratings yet
- On-Board Physical Battery Replacement System and Procedure For Drones During FlightDocument8 pagesOn-Board Physical Battery Replacement System and Procedure For Drones During FlightChamikara De SilvaNo ratings yet
- Design, Manufacturing, and Flight Testing of An Experimental Flying Wing UAVDocument22 pagesDesign, Manufacturing, and Flight Testing of An Experimental Flying Wing UAVPetraKrhačNo ratings yet
- NASA/TM--1999-209390: Wind Turbine Power System for MarsDocument10 pagesNASA/TM--1999-209390: Wind Turbine Power System for MarsYasmine AduomahdlouNo ratings yet
- Small Unmanned Aircraft: Theory and PracticeFrom EverandSmall Unmanned Aircraft: Theory and PracticeRating: 4.5 out of 5 stars4.5/5 (2)
- Numerical Investigation of The Combustion of Methane Air Mixture in Gas Turbine Can Type Combustion Chamber PDFDocument7 pagesNumerical Investigation of The Combustion of Methane Air Mixture in Gas Turbine Can Type Combustion Chamber PDFArul PrakashNo ratings yet
- Indian The First Man To FlyDocument6 pagesIndian The First Man To FlyArul PrakashNo ratings yet
- AE Question Paper2018Document12 pagesAE Question Paper2018Arul PrakashNo ratings yet
- TN PostalDocument25 pagesTN PostalenkayenkayNo ratings yet
- MIT16 50S12 Lec17Document2 pagesMIT16 50S12 Lec17sadiksnmNo ratings yet
- 1 s2.0 S1000936115002356 Main PDFDocument15 pages1 s2.0 S1000936115002356 Main PDFArul PrakashNo ratings yet
- Numerical Investigation of The Combustion of Methane Air Mixture in Gas Turbine Can Type Combustion Chamber PDFDocument7 pagesNumerical Investigation of The Combustion of Methane Air Mixture in Gas Turbine Can Type Combustion Chamber PDFArul PrakashNo ratings yet
- WCE2011 pp2009-2014Document6 pagesWCE2011 pp2009-2014Arul PrakashNo ratings yet
- Numerical Investigation of The Combustion of Methane Air Mixture in Gas Turbine Can Type Combustion Chamber PDFDocument7 pagesNumerical Investigation of The Combustion of Methane Air Mixture in Gas Turbine Can Type Combustion Chamber PDFArul PrakashNo ratings yet
- Thermodynamics of A Rotating Detonation EngineDocument217 pagesThermodynamics of A Rotating Detonation EngineArul PrakashNo ratings yet
- Research Article: Performance and Flow Field of A Gravitation Vortex Type Water TurbineDocument12 pagesResearch Article: Performance and Flow Field of A Gravitation Vortex Type Water TurbineArul PrakashNo ratings yet
- 13 - Chapter 7 PDFDocument33 pages13 - Chapter 7 PDFArul PrakashNo ratings yet
- A Computer Program For Designing of Shell-And-Tube PDFDocument10 pagesA Computer Program For Designing of Shell-And-Tube PDFArul PrakashNo ratings yet
- Design and Analysis of A Flapping Wing Mechanism For Optimization XDocument156 pagesDesign and Analysis of A Flapping Wing Mechanism For Optimization Xiwe1234No ratings yet
- Compressor and Combustion ChamberDocument83 pagesCompressor and Combustion ChamberArul Prakash100% (1)
- Waste Heat To Power ApplicationsDocument10 pagesWaste Heat To Power ApplicationsArul PrakashNo ratings yet
- Combustion and FlameDocument21 pagesCombustion and FlameSudarshan S K100% (1)
- 5901289Document56 pages5901289Arul PrakashNo ratings yet
- Sim U Link TutorialDocument23 pagesSim U Link TutorialJeff RobertNo ratings yet
- U90 Helicopter Gas Turbine Engines Transmissions Rotors and Structures AM2Document13 pagesU90 Helicopter Gas Turbine Engines Transmissions Rotors and Structures AM2Arul PrakashNo ratings yet
- Master Project 2013-07Document1 pageMaster Project 2013-07Arul PrakashNo ratings yet
- Ramjet ThrustDocument8 pagesRamjet Thrustvbhvmht09No ratings yet
- Docs Holo1 Optical HolographyDocument20 pagesDocs Holo1 Optical HolographyArul PrakashNo ratings yet
- Master Project 2013-07Document1 pageMaster Project 2013-07Arul PrakashNo ratings yet
- Airfoil Generation: NACA 4&5 SeriesDocument136 pagesAirfoil Generation: NACA 4&5 SeriesArul PrakashNo ratings yet
- Aer109-Aircraft Propulsion Unit 1Document168 pagesAer109-Aircraft Propulsion Unit 1Arul PrakashNo ratings yet
- Stalling Transport Aircraft - Dec 2013Document26 pagesStalling Transport Aircraft - Dec 2013mandolin windNo ratings yet
- Torsion of Thin Walled Beams: by Dr. Mahdi DamghaniDocument35 pagesTorsion of Thin Walled Beams: by Dr. Mahdi DamghaniAhmed Yasser BouslalahNo ratings yet
- PR Icon A5 A0Document2 pagesPR Icon A5 A0Juan QuintanaNo ratings yet
- Wikiwand Colomban Cri CriDocument5 pagesWikiwand Colomban Cri CriKiril NedkovNo ratings yet
- List of JournalDocument364 pagesList of JournalHarits PamitranNo ratings yet
- ATR42 AFM Rev 1.0 Jul 2018Document510 pagesATR42 AFM Rev 1.0 Jul 2018mickhail alvarezNo ratings yet
- Sherpa 500 Aircraft Specs: 5 Seats, 121 Gal Fuel, 400 HP EngineDocument1 pageSherpa 500 Aircraft Specs: 5 Seats, 121 Gal Fuel, 400 HP EngineAndy SetiawanNo ratings yet
- PA28R-180 Maneuvers Manual Revised 5/14/2012 Arrow IDocument24 pagesPA28R-180 Maneuvers Manual Revised 5/14/2012 Arrow IArturo PiñolNo ratings yet
- Project - BHELDocument41 pagesProject - BHELPrem KumarNo ratings yet
- Quimbaya Planes and Questions-31Document5 pagesQuimbaya Planes and Questions-31mariano martinezNo ratings yet
- A4 Portrait FS2004 Keyboard CommandsDocument3 pagesA4 Portrait FS2004 Keyboard CommandsParlindungan SitorusNo ratings yet
- Ipc Iv-VDocument492 pagesIpc Iv-Vizamariaa89No ratings yet
- AerodynamicDocument184 pagesAerodynamicKeyzo MasinambowNo ratings yet
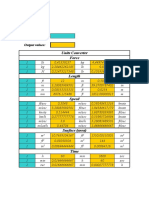
- Input Values: Output Values:: Units Converter ForceDocument5 pagesInput Values: Output Values:: Units Converter ForceJeyder GeorgeNo ratings yet
- Abbreviation and Acronym ListDocument4 pagesAbbreviation and Acronym ListsreckoNo ratings yet
- Specimen AIPDocument217 pagesSpecimen AIPdaniilNo ratings yet
- ANO-021-AWRG-1.0 - Airworthiness and Environmental Requirement For Products Parts and AppliancesDocument83 pagesANO-021-AWRG-1.0 - Airworthiness and Environmental Requirement For Products Parts and AppliancesAbdul Hannan AlamNo ratings yet
- Parts List 12 MAR 2019Document7 pagesParts List 12 MAR 2019Santiago GuzmanNo ratings yet
- DA40 Stable Unstable and Abnormal ApproachesDocument34 pagesDA40 Stable Unstable and Abnormal Approachesvikash_kumar_thakur100% (1)
- Alexander Bubenik Cessna 182Q ChecklistDocument2 pagesAlexander Bubenik Cessna 182Q ChecklistWarrior TempurNo ratings yet
- Piper PA-44-180 Seminole Pilot's Operating HandbookDocument344 pagesPiper PA-44-180 Seminole Pilot's Operating HandbookdimitrijevicanaNo ratings yet
- Lerj PDFDocument20 pagesLerj PDFMiguel Angel MartinNo ratings yet
- Young Scientist Programme (Yuvika) - Online Registration - IsRODocument28 pagesYoung Scientist Programme (Yuvika) - Online Registration - IsRONSRanganathNo ratings yet
- Faa Registry: N-Number Inquiry ResultsDocument3 pagesFaa Registry: N-Number Inquiry Resultsolga duqueNo ratings yet