You might also like
- Closed-Form Solutions For Elastoplastic Pure Bending of A Curved Beam With Material InhomogeneityDocument11 pagesClosed-Form Solutions For Elastoplastic Pure Bending of A Curved Beam With Material Inhomogeneityडॉ. कनिष्क शर्माNo ratings yet
- Mechanical Principles LO12Document84 pagesMechanical Principles LO12Muammer AlakaryNo ratings yet
- Generalized Hook's Law: Stres-Strain RelationDocument12 pagesGeneralized Hook's Law: Stres-Strain RelationbrintopvNo ratings yet
- Extreme Damping in Compliant Composites With A Negative-Sti Ness PhaseDocument6 pagesExtreme Damping in Compliant Composites With A Negative-Sti Ness PhaseAdnan AhmedNo ratings yet
- Brazilian Test Stress Field and Tensile Strength of Anisotropic Rocks Using An Analytical SolutioDocument14 pagesBrazilian Test Stress Field and Tensile Strength of Anisotropic Rocks Using An Analytical Solutiovinayak_katkarNo ratings yet
- Zhao 1989Document27 pagesZhao 1989Beatriz MoreiraNo ratings yet
- On The Convergence of A Non-Incremental Homogenization Method For Nonlinear Elastic Composite MaterialsDocument21 pagesOn The Convergence of A Non-Incremental Homogenization Method For Nonlinear Elastic Composite Materialsgego2No ratings yet
- Tensile Testing Experiment BackgroundDocument7 pagesTensile Testing Experiment BackgroundIzzah HzmhNo ratings yet
- MAE 640 Lec15Document18 pagesMAE 640 Lec15kostas.sierros9374No ratings yet
- Eshelby's Technique For Analyzing Inhomogeneities in GeomechanicsDocument27 pagesEshelby's Technique For Analyzing Inhomogeneities in GeomechanicsTim WongNo ratings yet
- Solid MechanicsDocument12 pagesSolid MechanicsÅñírbāñ SārkârNo ratings yet
- Alloying Element Effect On Al Alloys Elastic Constant (Elastic Properties)Document13 pagesAlloying Element Effect On Al Alloys Elastic Constant (Elastic Properties)Ayman AydanNo ratings yet
- Mechanics of Materials Ntu - Me Cjlu Note#2 Axial Loading 2023/3/2Document12 pagesMechanics of Materials Ntu - Me Cjlu Note#2 Axial Loading 2023/3/2張席郕No ratings yet
- Strain, Strain Rate, Stress-2Document26 pagesStrain, Strain Rate, Stress-2Marika LeitnerNo ratings yet
- Torsion TestDocument7 pagesTorsion Testilya danisyahNo ratings yet
- Mca 15 00096 PDFDocument12 pagesMca 15 00096 PDFFarrukh RizwanNo ratings yet
- Cohen Periodic Homogénisation Cubic 2004Document17 pagesCohen Periodic Homogénisation Cubic 2004auslenderNo ratings yet
- Self-Consistent Approximations For The Tangential-Displacement Correction To The Incremental Indentation StiffnessDocument7 pagesSelf-Consistent Approximations For The Tangential-Displacement Correction To The Incremental Indentation StiffnessIvan ArgatovNo ratings yet
- Mistler Et Al - 2007 - In-Plane and Out-Of-Plane Homogenisation of MasonryDocument10 pagesMistler Et Al - 2007 - In-Plane and Out-Of-Plane Homogenisation of Masonryappart.vue.sur.marneNo ratings yet
- MM 312 Solid Mechanics 2 Chapter 1 (Part 2) : Presented By: Dr. Farid Mahboubi NasrekaniDocument24 pagesMM 312 Solid Mechanics 2 Chapter 1 (Part 2) : Presented By: Dr. Farid Mahboubi NasrekaniMohammed IbrahimNo ratings yet
- On Spectral Element MethodDocument38 pagesOn Spectral Element MethodBaharulHussainNo ratings yet
- The Constitutive Tensor of Lineal ElasticityDocument33 pagesThe Constitutive Tensor of Lineal ElasticitySergio Andres ZerreitugNo ratings yet
- FebV7 I2 14Document13 pagesFebV7 I2 14Mohammed Al-RobaiNo ratings yet
- Analysis of Order of Singularity at A Vertex in 3D Transversely Isotropic Piezoelectric Single-Step Bonded JointsDocument13 pagesAnalysis of Order of Singularity at A Vertex in 3D Transversely Isotropic Piezoelectric Single-Step Bonded JointsAJER JOURNALNo ratings yet
- Nemat Nasser Periodic Homogénisation 1981Document17 pagesNemat Nasser Periodic Homogénisation 1981auslenderNo ratings yet
- HW - 05 2Document2 pagesHW - 05 2foufou2003No ratings yet
- Ball Bearing Mechanics: Ni/SaDocument107 pagesBall Bearing Mechanics: Ni/Saarda akkayaNo ratings yet
- On The Nonlinear Elastic Properties of Textile Reinforced Concrete Under Tensile Loading Including Damage and CrackingDocument7 pagesOn The Nonlinear Elastic Properties of Textile Reinforced Concrete Under Tensile Loading Including Damage and Crackingal_frdNo ratings yet
- Huang 1998Document8 pagesHuang 1998Krunal MoreyNo ratings yet
- Finite Element Formulation For Stability and FreeDocument7 pagesFinite Element Formulation For Stability and FreeValerioNo ratings yet
- Schematic Models of Constitutive Behavior of Solid MaterialsDocument4 pagesSchematic Models of Constitutive Behavior of Solid MaterialschoopoNo ratings yet
- Rayleigh Waves in Cosserat Elastic MaterialsDocument16 pagesRayleigh Waves in Cosserat Elastic MaterialsMike AlexNo ratings yet
- Bending, Vibration and Buckling of Simply Supported Thick Orthotropic Rectangular Plates and LaminatesDocument19 pagesBending, Vibration and Buckling of Simply Supported Thick Orthotropic Rectangular Plates and LaminatesLaxmith ShettyNo ratings yet
- Jun Et Al 2009 Shot Peen ReconstructionDocument4 pagesJun Et Al 2009 Shot Peen ReconstructionMartin HellNo ratings yet
- Capstan Equation Generalised For Noncircular GeometriesDocument28 pagesCapstan Equation Generalised For Noncircular GeometriesEkremm ÖneyNo ratings yet
- Linear Non Linear FEMDocument24 pagesLinear Non Linear FEMwial8295No ratings yet
- Ko Honda, William H. Kazez and Gordana Matic - Tight Contact Structures On Fibered Hyperbolic 3-ManifoldsDocument41 pagesKo Honda, William H. Kazez and Gordana Matic - Tight Contact Structures On Fibered Hyperbolic 3-ManifoldsCore0932No ratings yet
- One-Dimensional Elements: Before 1960, The Field of Structural Analysis Was Restricted To One-Dimensional ElementsDocument15 pagesOne-Dimensional Elements: Before 1960, The Field of Structural Analysis Was Restricted To One-Dimensional ElementsRondro Ny Aina LuciaNo ratings yet
- App 1975 070190723Document26 pagesApp 1975 070190723ARUN KRISHNA B J am21d400No ratings yet
- A Reexamination of Some Puzzling Results in Linearized ElasticityDocument9 pagesA Reexamination of Some Puzzling Results in Linearized ElasticityAlan BourscheidtNo ratings yet
- On Hooke'S Law : $ O.OO+O.OODocument12 pagesOn Hooke'S Law : $ O.OO+O.OOST12Aulia NisaNo ratings yet
- AlibakhshiDocument10 pagesAlibakhshiHakim KaciNo ratings yet
- CH 1Document64 pagesCH 1shaffetiNo ratings yet
- ME501 L3 Stress-Strain Relations Oct 2017Document8 pagesME501 L3 Stress-Strain Relations Oct 2017Firas RocktNo ratings yet
- C E D C A E: Ollege of Ngineering Epartment of Ivil & Rchitectural NgineeringDocument26 pagesC E D C A E: Ollege of Ngineering Epartment of Ivil & Rchitectural Ngineeringhend mahmoud100% (1)
- Unusual Closed-Form Solutions For Rod VibrationsDocument27 pagesUnusual Closed-Form Solutions For Rod VibrationsJojo Dela CruzNo ratings yet
- Elastic-Plastic Analysis For Surrounding Rock of Pressure Tunnel With Lining Based On Material Nonlinear SofteningDocument6 pagesElastic-Plastic Analysis For Surrounding Rock of Pressure Tunnel With Lining Based On Material Nonlinear SofteningfatimamolaeeNo ratings yet
- 3-D Finite Element Analysis of Composite Beams With Parallel Fibres, Based On Homogenization TheoryDocument14 pages3-D Finite Element Analysis of Composite Beams With Parallel Fibres, Based On Homogenization TheorytizoclopezNo ratings yet
- Elasticity: Material PropertiesDocument37 pagesElasticity: Material PropertiesAmeen ShahidNo ratings yet
- Continuum Micro-Mechanics of Elastoplastic Polycrystals PDFDocument13 pagesContinuum Micro-Mechanics of Elastoplastic Polycrystals PDFChandra ClarkNo ratings yet
- 02 Me9631 PDFDocument10 pages02 Me9631 PDFJuan Carlos Torres HernándezNo ratings yet
- 1 Modeling Crack Singularities in FEM/X-FEMDocument11 pages1 Modeling Crack Singularities in FEM/X-FEMmilad66tehNo ratings yet
- Form-Finding and Stability Analysis of Tensegrity Structures Using Nonlinear Programming and Fictitious Material PropertiesDocument6 pagesForm-Finding and Stability Analysis of Tensegrity Structures Using Nonlinear Programming and Fictitious Material Propertiesharishma hsNo ratings yet
- Discrete Shells: Eurographics/SIGGRAPH Symposium On Computer Animation (2003) D. Breen, M. Lin (Editors)Document7 pagesDiscrete Shells: Eurographics/SIGGRAPH Symposium On Computer Animation (2003) D. Breen, M. Lin (Editors)Antonio C. KeithNo ratings yet
- Chapter 5 - Solid Mechanics - 5.4-7 - 0Document17 pagesChapter 5 - Solid Mechanics - 5.4-7 - 0raphaelokafor09No ratings yet
- Session - 07 & 08Document38 pagesSession - 07 & 08Venkatesh GangadharNo ratings yet
- ICTP93 GibianskyDocument40 pagesICTP93 GibianskyGalahad666No ratings yet
- Theory of Elastisity, Stability and Dynamics of Structures Common ProblemsFrom EverandTheory of Elastisity, Stability and Dynamics of Structures Common ProblemsNo ratings yet
- Allowable Holes - Tji® Joists: Martin ResidenceDocument1 pageAllowable Holes - Tji® Joists: Martin ResidenceAngel CiarbonettiNo ratings yet
- Thermal Conductivity of Core Samples From The Cerro Prieto Geothermal Field: Experimental Results and An Improved Prediction MethodDocument15 pagesThermal Conductivity of Core Samples From The Cerro Prieto Geothermal Field: Experimental Results and An Improved Prediction MethodAngel CiarbonettiNo ratings yet
- Calculix Crunchix User'S Manual Version 2.17: Guido Dhondt July 23, 2020Document766 pagesCalculix Crunchix User'S Manual Version 2.17: Guido Dhondt July 23, 2020Angel CiarbonettiNo ratings yet
- Las Mejores Fotografias Del Mundo HimalayaDocument388 pagesLas Mejores Fotografias Del Mundo HimalayaRicardo LeyvaNo ratings yet
- Walden Garage S001Document1 pageWalden Garage S001Angel CiarbonettiNo ratings yet
- Presentation of Utilisation de Code - Aster Dans Salome - Meca (Asterstudy)Document25 pagesPresentation of Utilisation de Code - Aster Dans Salome - Meca (Asterstudy)pejakm1No ratings yet
- Report No.: Ballistic Research LaboratoriesDocument41 pagesReport No.: Ballistic Research LaboratoriesAngel CiarbonettiNo ratings yet
- Oof em Python BindingsDocument15 pagesOof em Python BindingsAngel CiarbonettiNo ratings yet
- Martin Residence: General Notes Sheet 1Document1 pageMartin Residence: General Notes Sheet 1Angel CiarbonettiNo ratings yet
- OOFEMDocument121 pagesOOFEMKILARUDIVYANo ratings yet
- OOFEMDocument121 pagesOOFEMKILARUDIVYANo ratings yet
- Lista de Verbos Irregulares en InglésDocument3 pagesLista de Verbos Irregulares en InglésWilliam Humberto GutierrezNo ratings yet
- Element Lib ManualDocument62 pagesElement Lib ManualAngel CiarbonettiNo ratings yet
- Programmers's ManualDocument75 pagesProgrammers's ManualAngel CiarbonettiNo ratings yet
- 05 RevealingStoriesDocument16 pages05 RevealingStoriesAngel CiarbonettiNo ratings yet
- Sample Paper: Certifi Cate For International Teachers of English Young LearnersDocument8 pagesSample Paper: Certifi Cate For International Teachers of English Young LearnersAngel CiarbonettiNo ratings yet
- Antaki - Tornado MissilesDocument18 pagesAntaki - Tornado MissilesAngel CiarbonettiNo ratings yet
- Example 1. Analysis of 2D Frame: DescriptionDocument27 pagesExample 1. Analysis of 2D Frame: DescriptionAngel CiarbonettiNo ratings yet
- Metodo de Punto Interior para OptimizaciónDocument95 pagesMetodo de Punto Interior para OptimizaciónAngel CiarbonettiNo ratings yet
- KeyCITE YL B14 PDFDocument4 pagesKeyCITE YL B14 PDFAngel CiarbonettiNo ratings yet
- Narrative EssayDocument2 pagesNarrative EssaySyed Arif Ali100% (4)
- Reported-Speech More ActivitiesDocument10 pagesReported-Speech More ActivitiesAUSAM123No ratings yet
- !6. Pre-Intermediate Template EE115Document12 pages!6. Pre-Intermediate Template EE115Angel CiarbonettiNo ratings yet
- 5 Tips Better Low Light ImagesDocument15 pages5 Tips Better Low Light ImagesAngel Ciarbonetti100% (1)
- How To Make The Ordinary Extraordinary: PhotzyDocument17 pagesHow To Make The Ordinary Extraordinary: PhotzyAngel CiarbonettiNo ratings yet
- Sample Paper: Certifi Cate For International Teachers of English Young LearnersDocument8 pagesSample Paper: Certifi Cate For International Teachers of English Young LearnersAngel CiarbonettiNo ratings yet
- Camuflaje ExperimentalDocument5 pagesCamuflaje ExperimentalAngel CiarbonettiNo ratings yet
- Anderson Fracture Mechanics SolverDocument49 pagesAnderson Fracture Mechanics SolverAngel Ciarbonetti0% (1)
- HMTDocument4 pagesHMTsumeetsharma270% (1)
- Kinematics of MachineDocument4 pagesKinematics of MachineSumit KambleNo ratings yet
- P 62Document25 pagesP 62JohnnardBelenNo ratings yet
- Questio 1Document2 pagesQuestio 1Ankit GuptaNo ratings yet
- Relativity VIC McqsDocument3 pagesRelativity VIC McqsLasnthaBandara75% (4)
- Physical Science: Quarter 1 - Module 1 Week 1: Formation of Elements Week 2: Polarity of MoleculesDocument19 pagesPhysical Science: Quarter 1 - Module 1 Week 1: Formation of Elements Week 2: Polarity of MoleculesMarie Grace Eguac Taghap100% (1)
- Absorption Chiller IntroductionDocument34 pagesAbsorption Chiller Introductiontan0314100% (1)
- 18md11&Hmt Lab FullDocument23 pages18md11&Hmt Lab FullSiva SankaranNo ratings yet
- Optical ComputersDocument46 pagesOptical ComputersManjunath MgNo ratings yet
- Pile Settlement - EnCE 4610Document36 pagesPile Settlement - EnCE 4610undf25No ratings yet
- Introduction To MicrosDocument105 pagesIntroduction To MicroschopkarNo ratings yet
- L-06 EQ Resistant Design of Reinforced Concrete Structures (Fall-2019)Document58 pagesL-06 EQ Resistant Design of Reinforced Concrete Structures (Fall-2019)OsamaZaidNo ratings yet
- Physics For Computer Science Students With Emphasis On Atomic and Semiconductor Physics - A. Damask e S. SchwarzDocument246 pagesPhysics For Computer Science Students With Emphasis On Atomic and Semiconductor Physics - A. Damask e S. SchwarzMichel AndradeNo ratings yet
- Introduction of TransducerDocument6 pagesIntroduction of TransducerFairus AffiniNo ratings yet
- CUMBIA Theory and User GuideDocument44 pagesCUMBIA Theory and User GuideSiul OnarbmazNo ratings yet
- Essentials of The Mechanics of Materials by George N. Frantziskonis PDFDocument338 pagesEssentials of The Mechanics of Materials by George N. Frantziskonis PDFYunus BAĞ100% (1)
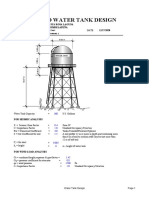
- Elevated Water Tank Design SpreadsheetDocument12 pagesElevated Water Tank Design SpreadsheetRuben Dario Posada B100% (3)
- CAPS-1: PhysicsDocument6 pagesCAPS-1: PhysicsLegendNo ratings yet
- Chemistry PPT - RadioactivityDocument23 pagesChemistry PPT - RadioactivityRishita SinghNo ratings yet
- Lecture 23 Oblique Incidence and ReflectionDocument21 pagesLecture 23 Oblique Incidence and Reflectionvaldesc_tolNo ratings yet
- Numerical Prediction of Various Failure Modes in Spot Welded MetalsDocument9 pagesNumerical Prediction of Various Failure Modes in Spot Welded Metalssumatrablackcoffee453No ratings yet
- Guidelines On The Design of Floor For Vibration Due To Walking LoadsDocument39 pagesGuidelines On The Design of Floor For Vibration Due To Walking LoadsLeung LiangNo ratings yet
- CHEM Part2Document90 pagesCHEM Part2Reiniel Cirujano AntonioNo ratings yet
- Internal Combustion Engines - H. B. Keswani - 2Document169 pagesInternal Combustion Engines - H. B. Keswani - 2Salman ShaxShax HeissNo ratings yet
- Passive Components (Compatibility Mode)Document102 pagesPassive Components (Compatibility Mode)gauravNo ratings yet
- Vortex Behaviour of An Unbaffled Surface Aerator PDFDocument6 pagesVortex Behaviour of An Unbaffled Surface Aerator PDFjbsantoNo ratings yet
- 122-Medical Physics and BiophysicsDocument4 pages122-Medical Physics and BiophysicsGoran MaliNo ratings yet
- Tuned Mass Damper Report PDFDocument21 pagesTuned Mass Damper Report PDFRitu t Raj100% (1)
- Kinetic TheoryDocument26 pagesKinetic TheoryDelano PeteNo ratings yet