You might also like
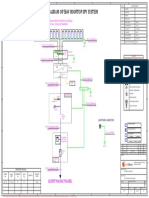
- Single Line Diagram of 5kw Rooftop SPV SystemDocument1 pageSingle Line Diagram of 5kw Rooftop SPV SystemArun Sasidharan100% (2)
- Counterfeit Integrated CircuitsDocument15 pagesCounterfeit Integrated CircuitsPudi PudaNo ratings yet
- Introduction To MIMO SystemsDocument8 pagesIntroduction To MIMO SystemsnataliiadesiiNo ratings yet
- Design of Linear Array Transducer Using Ultrasound Simulation Program Field-IIDocument7 pagesDesign of Linear Array Transducer Using Ultrasound Simulation Program Field-IIinventyNo ratings yet
- Joint Synchronization and Channel Estimation For MIMO-OFDM Systems Using EM AlgorithmDocument8 pagesJoint Synchronization and Channel Estimation For MIMO-OFDM Systems Using EM AlgorithmInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Introduction To Synthetic Aperture Sonar PDFDocument27 pagesIntroduction To Synthetic Aperture Sonar PDFnaivedya_mishraNo ratings yet
- DPU30A-N06A1 & DPU30D-N06A1 & DBU20B-N12A1 & DBU20B-N12A2 (2 KW) Distributed Power System User Manual PDFDocument79 pagesDPU30A-N06A1 & DPU30D-N06A1 & DBU20B-N12A1 & DBU20B-N12A2 (2 KW) Distributed Power System User Manual PDFEugeneZarubin100% (1)
- Channel Estimation EJSR 70-1-04Document8 pagesChannel Estimation EJSR 70-1-04حاتم الشرڭيNo ratings yet
- Channel Estimation Algorithms For OFDM SystemsDocument5 pagesChannel Estimation Algorithms For OFDM Systemsdearprasanta6015No ratings yet
- iG5A ManualDocument170 pagesiG5A ManualBasarudin AhmadNo ratings yet
- EN 50600-2-2 Power Supply and Distribution: Mike Gilmore, FIETDocument8 pagesEN 50600-2-2 Power Supply and Distribution: Mike Gilmore, FIETjohon100% (1)
- Spread Spectrum Ultrasonic Positioning SystemDocument6 pagesSpread Spectrum Ultrasonic Positioning SystemTuấn DũngNo ratings yet
- Ultrasonic Sensor Network: Target Localization With Passive Self-LocalizationDocument9 pagesUltrasonic Sensor Network: Target Localization With Passive Self-LocalizationAmit SinghNo ratings yet
- A Low Cost TDOA Localization System: Setup, Challenges and ResultsDocument4 pagesA Low Cost TDOA Localization System: Setup, Challenges and Resultscuteabhi47No ratings yet
- Adaptive Antenna Selection and TX/RX Beamforming For Large-Scale Mimo Systems in 60Ghz ChannelsDocument30 pagesAdaptive Antenna Selection and TX/RX Beamforming For Large-Scale Mimo Systems in 60Ghz Channelsamgad2010No ratings yet
- Array Processing For Target DOA, Localization, and Classification Based On AML and SVM Algorithms in Sensor NetworksDocument17 pagesArray Processing For Target DOA, Localization, and Classification Based On AML and SVM Algorithms in Sensor NetworksTrilochan PanigrahiNo ratings yet
- Experimental Investigation of Factors Affecting Stability of Interferometric Measurements With Ground Based Noise Waveform SARDocument5 pagesExperimental Investigation of Factors Affecting Stability of Interferometric Measurements With Ground Based Noise Waveform SARkudriashovvladimirNo ratings yet
- Joint Angle and Delay Estimation (JADE) For Multipath Signals Arriving at An Antenna ArrayDocument3 pagesJoint Angle and Delay Estimation (JADE) For Multipath Signals Arriving at An Antenna ArrayJoyce GeorgeNo ratings yet
- Introduction To Synthetic Aperture Sonar: Roy Edgar HansenDocument27 pagesIntroduction To Synthetic Aperture Sonar: Roy Edgar HansenKarelkatNo ratings yet
- Crosby 7B3Document7 pagesCrosby 7B3Евгений ПереверзевNo ratings yet
- IR UWB TOA Estimation Techniques and Comparison: Sri Hareendra Bodduluri, Anil Solanki and Mani VVDocument5 pagesIR UWB TOA Estimation Techniques and Comparison: Sri Hareendra Bodduluri, Anil Solanki and Mani VVinventionjournalsNo ratings yet
- University of Vaasa Faculty of Technology: Xiaoguo Xue V98983Document19 pagesUniversity of Vaasa Faculty of Technology: Xiaoguo Xue V98983Lina Maria Fernández GualdronNo ratings yet
- Near Field Phased Array DOA and Range Estimation of UHF RFID TagsDocument5 pagesNear Field Phased Array DOA and Range Estimation of UHF RFID TagsTharindu Samith AbeywickramaNo ratings yet
- A Class of Spectrum-Sensing Schemes For Cognitive Radio Under Impulsive Noise Circumstances: Structure and Performance in Nonfading and Fading EnvironmentsDocument18 pagesA Class of Spectrum-Sensing Schemes For Cognitive Radio Under Impulsive Noise Circumstances: Structure and Performance in Nonfading and Fading EnvironmentsBedadipta BainNo ratings yet
- Underwater Acoustic ModemDocument11 pagesUnderwater Acoustic ModemLoc NguyenNo ratings yet
- Uwb PDFDocument5 pagesUwb PDFHinduja IcchapuramNo ratings yet
- MIMO Radar A Idea Whose Time Has ComeDocument8 pagesMIMO Radar A Idea Whose Time Has Cometrongnguyen29No ratings yet
- Estimating Location of Radio Devices Using TDOA and Doppler ShiftsDocument14 pagesEstimating Location of Radio Devices Using TDOA and Doppler ShiftsNivethitha JayarajNo ratings yet
- Engineering Journal Multipath Parameter Estimation For Synthetic Aperture Sonar Using The SAGE AlgorithmDocument11 pagesEngineering Journal Multipath Parameter Estimation For Synthetic Aperture Sonar Using The SAGE AlgorithmEngineering JournalNo ratings yet
- Beam FormDocument12 pagesBeam FormMiguel CuyaNo ratings yet
- Iterative Compensation of Microphone Array and Sound Source Movements Based On Minimization of Arrival Time DifferencesDocument5 pagesIterative Compensation of Microphone Array and Sound Source Movements Based On Minimization of Arrival Time Differencesscribd1235207No ratings yet
- 3-D Localization of Underwater Sound Using SpheresDocument5 pages3-D Localization of Underwater Sound Using SpheresGek CagatanNo ratings yet
- Cyclostationary-Based Architectures ForDocument5 pagesCyclostationary-Based Architectures ForRaman KanaaNo ratings yet
- On Timing Offset and Frequency Offset Estimation in LTE UplinkDocument10 pagesOn Timing Offset and Frequency Offset Estimation in LTE UplinkAjay SharmaNo ratings yet
- Ref 19Document11 pagesRef 19Sandeep SunkariNo ratings yet
- Free Space Path Loss MathlabDocument6 pagesFree Space Path Loss MathlabNarayana Sarma MarthiNo ratings yet
- RF SENSING ImpairmentsDocument6 pagesRF SENSING Impairmentsparientola90No ratings yet
- Designing A Basic Mono Static Pulse Radar DemoDocument10 pagesDesigning A Basic Mono Static Pulse Radar Demoaqua_salmanNo ratings yet
- Doppler Spread Estimation in Mobile Communication SystemsDocument5 pagesDoppler Spread Estimation in Mobile Communication Systems82416149No ratings yet
- SPAWC 2013 Liao Etal HandoverOptimizationDocument5 pagesSPAWC 2013 Liao Etal HandoverOptimizationmimbrillitoNo ratings yet
- SAR image range resolution using MUSIC algorithmDocument5 pagesSAR image range resolution using MUSIC algorithmletiendung_dtvt7119No ratings yet
- RCS VnaDocument12 pagesRCS VnaMarius CheroiuNo ratings yet
- Acoustic Source Localization and Beamforming: Theory and PracticeDocument13 pagesAcoustic Source Localization and Beamforming: Theory and PracticeKhalil HsaineNo ratings yet
- Enhanced Source Separation For Phase-Sequenced Simultaneous Source Marine Vibrator DataDocument5 pagesEnhanced Source Separation For Phase-Sequenced Simultaneous Source Marine Vibrator Datarenatogeo14No ratings yet
- Implementation of An Adaptive Antenna Array Using The TMS320C541Document11 pagesImplementation of An Adaptive Antenna Array Using The TMS320C541Harshvardhan ChoudharyNo ratings yet
- SPECTRALDocument6 pagesSPECTRALlogu_thalirNo ratings yet
- UHF Surface Dynamics Parameters Radar Design and ExperimentDocument3 pagesUHF Surface Dynamics Parameters Radar Design and ExperimentmenguemengueNo ratings yet
- Haptic Feedback: Rationale and Source of Our Project IdeaDocument25 pagesHaptic Feedback: Rationale and Source of Our Project IdeasrujanNo ratings yet
- Spectrum Sensing Techniques: A Comparison Between Energy Detector and Cyclostationarity DetectorDocument6 pagesSpectrum Sensing Techniques: A Comparison Between Energy Detector and Cyclostationarity Detectorsuchi87No ratings yet
- Adaptive Coded Modulation With Receive Antenna Diversity and Imperfect Channel Knowledge at Receiver and TransmitterDocument7 pagesAdaptive Coded Modulation With Receive Antenna Diversity and Imperfect Channel Knowledge at Receiver and TransmitterMatthew Luis Llano LoveraNo ratings yet
- GMA ITG Fachtagung Sensoren Und Messsysteme 2016 5.4.3 Sensoren2016Document7 pagesGMA ITG Fachtagung Sensoren Und Messsysteme 2016 5.4.3 Sensoren2016Emma SualiNo ratings yet
- muller2020 (1)Document4 pagesmuller2020 (1)AHMADNo ratings yet
- Location Accuracy of An UWB Localization System in A Multi-Path EnvironmentDocument6 pagesLocation Accuracy of An UWB Localization System in A Multi-Path EnvironmentlagomtchoNo ratings yet
- (1967) Digital Pulse Compression Radar ReceiverDocument9 pages(1967) Digital Pulse Compression Radar ReceiverAlex YangNo ratings yet
- Publications SmartAntennasDocument8 pagesPublications SmartAntennasCatherine PetersNo ratings yet
- Smart Antenna DOA Estimation Algorithms SurveyDocument6 pagesSmart Antenna DOA Estimation Algorithms SurveyVinod Kumar GirrohNo ratings yet
- 01621411Document14 pages01621411JT GohNo ratings yet
- Introduction to MIMO Systems for Wireless CommunicationsDocument14 pagesIntroduction to MIMO Systems for Wireless CommunicationsmazhaicNo ratings yet
- Analogue Communication 1Document69 pagesAnalogue Communication 1Malu SakthiNo ratings yet
- Localization in Sensor NetworksDocument50 pagesLocalization in Sensor Networksgk_gbuNo ratings yet
- Software Radio: Sampling Rate Selection, Design and SynchronizationFrom EverandSoftware Radio: Sampling Rate Selection, Design and SynchronizationNo ratings yet
- Input TransducerDocument22 pagesInput TransducerSally SimanNo ratings yet
- Interface - Brad Harrison Plug - 3-Pin For Single Solenoid - 5-Pin For Double SolenoidDocument1 pageInterface - Brad Harrison Plug - 3-Pin For Single Solenoid - 5-Pin For Double Solenoids bNo ratings yet
- Square Topology For NoCsDocument4 pagesSquare Topology For NoCsJournal of ComputingNo ratings yet
- Garden Monitoring and Automation Using Atmega 16Document4 pagesGarden Monitoring and Automation Using Atmega 16Boselin PrabhuNo ratings yet
- User Guide Guide de L'utilisateur: English FrançaisDocument177 pagesUser Guide Guide de L'utilisateur: English Français陳建華No ratings yet
- Everex Stepnote Va Series User ManualDocument140 pagesEverex Stepnote Va Series User ManualmrjqNo ratings yet
- 21 January 2016 Manichudar Tamil Daily E PaperDocument4 pages21 January 2016 Manichudar Tamil Daily E PaperAnonymous wBeEhqCI7No ratings yet
- Title: Decoder Instruction AimsDocument4 pagesTitle: Decoder Instruction Aimssuv_fameNo ratings yet
- Electro CoatingDocument2 pagesElectro CoatingViswanathan SrkNo ratings yet
- IEEEAwards 2015Document40 pagesIEEEAwards 2015yacobaschalewNo ratings yet
- 1LCA000003-LTE SinglePh Overhead 10kVA 167kVA Rev01Document4 pages1LCA000003-LTE SinglePh Overhead 10kVA 167kVA Rev01thapa786mNo ratings yet
- Indus Elec - Module 1 Filtered Power SuppliesDocument17 pagesIndus Elec - Module 1 Filtered Power SuppliesRoyce SumagaysayNo ratings yet
- DBC1 AVR SINCRO MANUAL - Rev02Document12 pagesDBC1 AVR SINCRO MANUAL - Rev02jean sanchezNo ratings yet
- NEW Project ProposalDocument17 pagesNEW Project ProposalHabtamu BaynekawNo ratings yet
- PCI-E Installation Guide英文版161116Document2 pagesPCI-E Installation Guide英文版161116jakov320No ratings yet
- Nominal and Detailed LTE Radio Network Planning for Dhaka CityDocument8 pagesNominal and Detailed LTE Radio Network Planning for Dhaka Cityhmalrizzo469No ratings yet
- Programmable Digital TimerDocument5 pagesProgrammable Digital TimerPrasadPurohitNo ratings yet
- NiCd & NiMH Battery Charger Circuit - Circuit DiagramDocument2 pagesNiCd & NiMH Battery Charger Circuit - Circuit DiagramSandun Pushpa KumaraNo ratings yet
- DatasheetDocument28 pagesDatasheetban444450% (2)
- BSIM4 ManualDocument188 pagesBSIM4 ManualAnitha MariappanNo ratings yet
- Adjust Bias Current and Offset VoltageDocument8 pagesAdjust Bias Current and Offset Voltageantonio100% (1)
- Led T8 Value Glass: Tubular LampsDocument2 pagesLed T8 Value Glass: Tubular LampsMohammed YasarNo ratings yet
- Pill Camera: A Miniature Camera That Travels Through Your Digestive SystemDocument19 pagesPill Camera: A Miniature Camera That Travels Through Your Digestive SystemBHAGYA LAKSHMINo ratings yet
- Formatting NotesDocument4 pagesFormatting NotesHans Marc SimplicioNo ratings yet
- Sep - Nov 2011Document44 pagesSep - Nov 2011JosephatNjorogeMNo ratings yet