You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Chapter 10 User Password and Object SecurityDocument34 pagesChapter 10 User Password and Object SecurityDAhimsaNo ratings yet
- E3fa DP25Document3 pagesE3fa DP25DAhimsaNo ratings yet
- A Way Out PC RepackDocument4 pagesA Way Out PC RepackDAhimsaNo ratings yet
- Photoelectric eDocument18 pagesPhotoelectric eDAhimsaNo ratings yet
- Cosmotec CVE08002208000 DatasheetDocument13 pagesCosmotec CVE08002208000 DatasheetDAhimsaNo ratings yet
- Sensor Dc-Ac 3 Wire PNPDocument1 pageSensor Dc-Ac 3 Wire PNPDAhimsaNo ratings yet
- OB1Document24 pagesOB1DAhimsaNo ratings yet
- Harga Laptop Lenovo AMDDocument16 pagesHarga Laptop Lenovo AMDDAhimsaNo ratings yet
- FESTO Hydraulics CourseDocument236 pagesFESTO Hydraulics Coursemadmax2222100% (17)
- Intel® Core™ I3-370m Processor (3M Cache, 2,40 GHZ)Document5 pagesIntel® Core™ I3-370m Processor (3M Cache, 2,40 GHZ)DAhimsaNo ratings yet
- Asus Product Guide: 360° Freedom. 100% ZenbookDocument39 pagesAsus Product Guide: 360° Freedom. 100% ZenbookkrisnaNo ratings yet
- Rog Booklet PDFDocument55 pagesRog Booklet PDFBudhi SantosoNo ratings yet
- ASUS Product Guide 2Document37 pagesASUS Product Guide 2Ananta Prasetya PutraNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Introduction To Cmos Vlsi Design: Combinational CircuitsDocument37 pagesIntroduction To Cmos Vlsi Design: Combinational CircuitsShubham MittalNo ratings yet
- Training VFD Trouble Shooting at Reva Industries Limited.: Service DepartmentDocument31 pagesTraining VFD Trouble Shooting at Reva Industries Limited.: Service DepartmentEhsan GhanbarzadehNo ratings yet
- Sfu HandleDocument82 pagesSfu HandlenalasekaranNo ratings yet
- Electronic Devices Final Exam ReviewDocument28 pagesElectronic Devices Final Exam ReviewMr KNo ratings yet
- Cub Cadet Parts Manual For Model 1641 SN 880001 899000Document8 pagesCub Cadet Parts Manual For Model 1641 SN 880001 899000linda100% (40)
- BOMDocument1 pageBOMHytech Pvt. Ltd.No ratings yet
- Controlador Damer On ofDocument2 pagesControlador Damer On ofBode JuniorNo ratings yet
- DC-325 Ceiling Fan Instruction ManualDocument15 pagesDC-325 Ceiling Fan Instruction ManualKeziah SantosNo ratings yet
- Cabluri PretDocument37 pagesCabluri Pretpdragos9No ratings yet
- 16TTS12Document7 pages16TTS12Isidro CruzNo ratings yet
- Powerflex 755 Ac Drives: Hardware Service ManualDocument472 pagesPowerflex 755 Ac Drives: Hardware Service ManualJefferson NickNo ratings yet
- EWP U2 Automatic OLTCDocument3 pagesEWP U2 Automatic OLTCStreesNo ratings yet
- EE460 Power Electronics Exam SolutionsDocument4 pagesEE460 Power Electronics Exam SolutionsTurki AlsalehNo ratings yet
- AVR Based 12v DC Motor ControlDocument7 pagesAVR Based 12v DC Motor ControlVijayangg VijiNo ratings yet
- 04 21 Spezifikation DC-Kabel Rosenberger V5.0.1Document2 pages04 21 Spezifikation DC-Kabel Rosenberger V5.0.1Oleksandr BestNo ratings yet
- Non Maintained / Maintained Emergency Luminaires: GR-8/leds GR-9/leds Technical Characteristics (Document3 pagesNon Maintained / Maintained Emergency Luminaires: GR-8/leds GR-9/leds Technical Characteristics (Незнани ЈунакNo ratings yet
- Module 2J Synchronization of Alternators in ParallelDocument25 pagesModule 2J Synchronization of Alternators in Parallelsнıkαмαяυ NaraNo ratings yet
- Isc 2SB1342: Silicon PNP Darlington Power TransistorDocument2 pagesIsc 2SB1342: Silicon PNP Darlington Power TransistorrolandseNo ratings yet
- Ae - Lab 6Document6 pagesAe - Lab 6Usman KhalilNo ratings yet
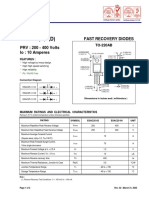
- ESAC25 (C, N, D) : Fast Recovery Diodes PRV: 200 - 400 Volts Io: 10 AmperesDocument2 pagesESAC25 (C, N, D) : Fast Recovery Diodes PRV: 200 - 400 Volts Io: 10 AmperesCarlos David MarquezNo ratings yet
- Experiment Iv Silicon-Controlled Rectifier I. ObjectiveDocument6 pagesExperiment Iv Silicon-Controlled Rectifier I. ObjectiveDenisse Torizo OlanNo ratings yet
- Aust/Eee: Ahsanullah University of Science and TechnologyDocument27 pagesAust/Eee: Ahsanullah University of Science and TechnologyShariful IslamNo ratings yet
- BCI184E - Technical Data SheetDocument8 pagesBCI184E - Technical Data SheetmkNo ratings yet
- 9A02504 Power ElectronicsDocument4 pages9A02504 Power ElectronicsMohan Krishna100% (1)
- CIRCUIT BASIC CONCEPTSDocument43 pagesCIRCUIT BASIC CONCEPTSmonisa kannanNo ratings yet
- Darkness Detector Using LDRDocument13 pagesDarkness Detector Using LDRKaos Polos Nakira0% (1)
- General Notes and SpecificationsDocument1 pageGeneral Notes and SpecificationsSheena Mae FloresNo ratings yet
- Stoc Disponibil 23 06 2022Document4 pagesStoc Disponibil 23 06 2022Razvan BolocanNo ratings yet
- L36 - DC Machines PDFDocument161 pagesL36 - DC Machines PDFKshitijNo ratings yet
- As 102258 GS C 611i44 Us 1019-1 PDFDocument28 pagesAs 102258 GS C 611i44 Us 1019-1 PDFRachiahi TarikNo ratings yet