You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 95 102Tesma109IJEAST1 PDFDocument9 pages95 102Tesma109IJEAST1 PDFGeorgeMThomasNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Designreportecokart2015 160925071647Document18 pagesDesignreportecokart2015 160925071647Priyesh SinghNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Blackbook Our ProjectDocument62 pagesBlackbook Our ProjectLalitChoudharyNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- 25 Eko Go KartDocument16 pages25 Eko Go KartPriyesh SinghNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- 25 Eko Go KartDocument16 pages25 Eko Go KartPriyesh SinghNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Mit PDFDocument23 pagesMit PDFSravan GundamNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Increase Factor of Safety of Go-Kart Chassis During Front Impact AnalysisDocument6 pagesIncrease Factor of Safety of Go-Kart Chassis During Front Impact AnalysisIJIRSTNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Heat Transfer PK Nag PDFDocument526 pagesHeat Transfer PK Nag PDFPriyesh SinghNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Self Balancing One WheelDocument7 pagesSelf Balancing One WheelPriyesh SinghNo ratings yet
- 1300 Math Formulas - Alex SvirinDocument338 pages1300 Math Formulas - Alex SvirinMirnesNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Booklet Adobe Indesign cs6 LBV PDFDocument48 pagesBooklet Adobe Indesign cs6 LBV PDFPriyesh SinghNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- TutsGalaxy.com.txtDocument1 pageTutsGalaxy.com.txtPriyesh SinghNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- of Go KartDocument12 pagesof Go KartPriyesh SinghNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Lecture1530518026 PDFDocument130 pagesLecture1530518026 PDFMuhtasim FuadNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Excel Training - Level 1Document95 pagesExcel Training - Level 1Cristiano Aparecido da SilvaNo ratings yet
- Analysis of FSAEDocument4 pagesAnalysis of FSAEPriyesh SinghNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- N-1-1 Contingency Analysis Using Powerworld SimulatorDocument15 pagesN-1-1 Contingency Analysis Using Powerworld Simulatorchandana901No ratings yet
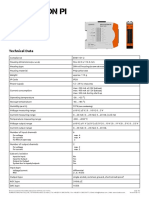
- Datasheet RevPi AIODocument2 pagesDatasheet RevPi AIOsebadansNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Primavera Manual PDFDocument445 pagesPrimavera Manual PDFsajeevNo ratings yet
- D758-Et Minipurge ManualDocument39 pagesD758-Et Minipurge ManualNicholas marcolan (nmarcolan)No ratings yet
- Wood AshDocument5 pagesWood AshJohn loyd hernandezNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- BibliographyDocument5 pagesBibliographyMonal ParekhNo ratings yet
- Highway Planning Manual Volume 8 PDFDocument72 pagesHighway Planning Manual Volume 8 PDFHanz Maca-ayanNo ratings yet
- Simatic Net CP 343-1Document56 pagesSimatic Net CP 343-1AlexSotelo100% (1)
- Nghi Son 2 BOT Thermal Power Plant Project Design Query SheetDocument4 pagesNghi Son 2 BOT Thermal Power Plant Project Design Query SheetDoan Ngoc DucNo ratings yet
- Metallographic Sample Preparation Techniques: BackgroundDocument8 pagesMetallographic Sample Preparation Techniques: BackgroundQA LAB ISMNo ratings yet
- Valve Catalogue General Imsubs Pvt. Ltd.Document20 pagesValve Catalogue General Imsubs Pvt. Ltd.Spark MeditechNo ratings yet
- Contoh Bangunan Tropis 3Document132 pagesContoh Bangunan Tropis 3Ahmad Aziz FuadiNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Light, Shadow & ReflectionDocument3 pagesLight, Shadow & ReflectionirfannmsNo ratings yet
- Sue's Rendezvous Illegal Certificate of OccupancyDocument3 pagesSue's Rendezvous Illegal Certificate of OccupancySamuel L. RiversNo ratings yet
- Class Flanges Bolt Torque Loads PDFDocument2 pagesClass Flanges Bolt Torque Loads PDFHomer SilvaNo ratings yet
- Draft SOP For Usage of Tree PrunerDocument2 pagesDraft SOP For Usage of Tree PrunerAkhilesh Kumar Singh100% (1)
- Sony FDR AX1 - E ProDocument68 pagesSony FDR AX1 - E ProTodorNo ratings yet
- 4.2 Beam Post-ProcessingDocument23 pages4.2 Beam Post-Processingjingyong123No ratings yet
- Constantinos Apostolou DoxiadisDocument6 pagesConstantinos Apostolou DoxiadisEdith Nerissa SantiagoNo ratings yet
- 01 01 14 2Document12 pages01 01 14 2brains26No ratings yet
- Aulas Y Horarios: Facultad de Ingeniería Coordinación de Ingeniería en Computación SEMESTRE 2019 BDocument1 pageAulas Y Horarios: Facultad de Ingeniería Coordinación de Ingeniería en Computación SEMESTRE 2019 BIván Martínez AguirreNo ratings yet
- Magnetic Abrasive Finishing A Review IJERTV2IS3010Document9 pagesMagnetic Abrasive Finishing A Review IJERTV2IS3010Saketh ReddyNo ratings yet
- Design of Connecting Rod For Light Weight Using C70S6 MaterialDocument9 pagesDesign of Connecting Rod For Light Weight Using C70S6 MaterialKongala Vamsi KrishnaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- TQMDocument55 pagesTQMTanmoy GuhaNo ratings yet
- 2 - WCDMA Power ControlDocument50 pages2 - WCDMA Power ControlSabrine Chahbi100% (1)
- Service Manual HP Ze4900 SchematicsDocument39 pagesService Manual HP Ze4900 SchematicseduardosceNo ratings yet
- ASTM A395 - A 395M - 99 (Reapproved 2009)Document8 pagesASTM A395 - A 395M - 99 (Reapproved 2009)raulNo ratings yet
- SYLVANIA W6413tc - SMDocument46 pagesSYLVANIA W6413tc - SMdreamyson1983100% (1)
- Using The Low Cycle Fatigue Approach When KT Nominal Stress Exceeds The Yield Strength: A Fundamental Mistake!Document2 pagesUsing The Low Cycle Fatigue Approach When KT Nominal Stress Exceeds The Yield Strength: A Fundamental Mistake!VigneshwaraNo ratings yet
- Launchpad S and Mini Advanced Features GuideDocument6 pagesLaunchpad S and Mini Advanced Features GuidealessoniaNo ratings yet
- The ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemFrom EverandThe ISO 45001:2018 Implementation Handbook: Guidance on Building an Occupational Health and Safety Management SystemNo ratings yet
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (54)